
Fターム[2F069HH01]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | タッチプローブ (162)
Fターム[2F069HH01]に分類される特許
21 - 40 / 162
座標測定用ヘッドユニット及び座標測定機
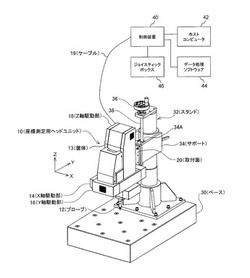
【課題】小型、安価で、高速の高精度測定が可能であり、工作機械における機上測定や搬送ラインでのインサイト測定が容易な、座標測定用ヘッドユニットを提供する。
【解決手段】座標測定用ヘッドユニット10において、コンピュータ数値制御によりプローブ12を互いに直交する複数の駆動軸に沿って移動させ、測定対象に当接させて測定対象の寸法を計測するための駆動手段(X軸駆動部14、Y軸駆動部16、Z軸駆動部18)と、該駆動手段14、16、18を収めるための一体化された筐体13と、該筐体13のいずれかの側面に設けられた、前記駆動手段14、16、18のいずれか一つを支持体(ベース30に固定されたスタンド32上のサポート34)に取付けるための取付手段(取付面20)と、を備える。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具

【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
産業機械
【課題】 移動機構の揺動を抑えて移動機構を移動させることができ、制御対象物による測定誤差を低減できる産業機械を提供する。
【解決手段】 三次元測定機1は、被測定物を載置するテーブル11と、テーブル11に対して移動可能な支持部213を有し、支持部213で支持されて所定の軸方向へ移動可能に設けられ、プローブ12を所定の軸方向へ移動させる移動機構2と、移動機構2を制御する制御装置と、門型フレーム21に取り付けられ、移動機構2と制御装置とを接続するケーブルを案内して収納するケーブルベア3とを備えるものであって、ケーブルベア3の重心を通ってZ軸方向に延びる重心軸線O−Oが、X軸方向において、支持部213の中心を通ってZ軸方向に延びる支持案内軸P−Pと一致している。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
産業機械
【課題】使用する環境の温度変化や、経時変化などの影響があっても適切に空間精度補正をすることができる産業機械の提供。
【解決手段】産業機械としての三次元測定機1は、ガイド部212と、コラム221とで構成され、Y軸方向に沿って移動する移動機構と、コラム221の角度を検出する2軸角度計32と、移動機構を制御する制御装置4とを備える。制御装置4は、角度誤差取得部42と、パラメータ生成部43と、補正部44とを備える。角度誤差取得部42は、コラム221を移動させたときに2軸角度計32にて検出される角度に基づいて、コラム221の位置に対するコラム221の角度誤差を取得する。パラメータ生成部43は、角度誤差取得部42にて取得されるコラム221の角度誤差をコラム221の位置で積分することで真直度補正パラメータを生成する。補正部44は、パラメータ生成部43にて生成される真直度補正パラメータに基づいて、移動機構の運動誤差を補正する。
(もっと読む)
工作機械における工作物測定方法およびその装置
【課題】計測器を別途使用しなくても、工作物測定用の測定ヘッドが本来有している測定機能を有効利用して測定ヘッドの3次元オフセットを取得して、測定ヘッドで工作物を測定する工作物測定方法を提供する。
【解決手段】工作機械に取付けられた測定ヘッド10を所定角度旋回させて基準球30を第1の方向E1と第2の方向E2から測定することによって、基準球における中心点A1の座標を取得する。測定ヘッドが基準球の中心点を第1の方向から測定したときの測定ヘッドの第1の機械座標と、測定ヘッドが基準球の中心点を第2の方向から測定したときの測定ヘッドの第2の機械座標とに基づいて、測定ヘッドの3次元オフセットを取得する。その後、測定ヘッドの3次元オフセットを使用して、工作物を測定ヘッドで測定する。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップ100と、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 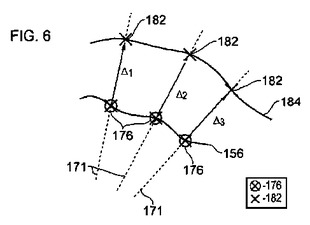 (もっと読む)
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
基準器、及び座標測定機
【課題】定盤の自由な位置に設置することができ、座標測定機の製造コストを低減させることができる基準器の提供。
【解決手段】基準器は、三次元測定機に測定される基準器本体と、基準器本体を支持する台座4とを備える。台座4は、定盤11の平面11Aに当接する当接面421を有する円盤状に形成されている。当接面421には、断面円環状の凹部422が形成されるとともに、凹部422には、空気を吸気するための吸気孔423が形成されている。また、台座4は、吸気孔423に連通する吸気用流路43を有し、吸気用流路43を介して吸気孔423から空気が吸気されることで定盤11に対して吸着することができる。
(もっと読む)
統合された部品温度測定システム
例示的な実施形態は、可搬型の関節アーム座標測定機であって、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アームであって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アームと、関節アーム座標測定機の第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路と、電磁放射に反応し、物体の温度に応じて電気信号を生成する、関節アーム座標測定機に配置される少なくとも1つのセンサ要素と、電気信号を温度値に変換する電子システムとを含む、関節アーム座標測定機を含む。  (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 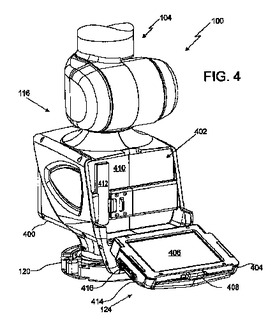 (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 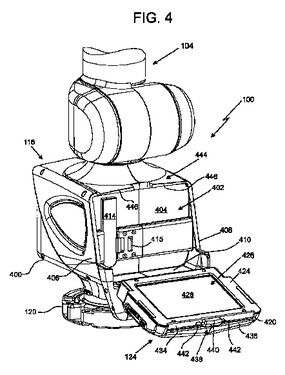 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 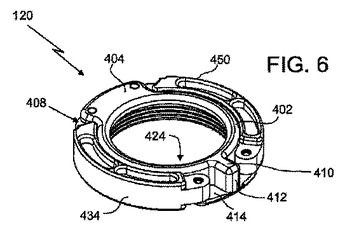 (もっと読む)
(もっと読む)
21 - 40 / 162
[ Back to top ]