
Fターム[2F077AA01]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 異常、故障、断線又は誤りの検出 (429)
Fターム[2F077AA01]の下位に属するFターム
信号レベルによるもの (105)
2相信号の所定関係によるもの (62)
他の検出出力との比較によるもの (72)
チェックコードを用いるもの (5)
使用符号と照合するもの (12)
予測信号と照合するもの (29)
誤り訂正を行うもの (24)
警報又は表示を行うもの (63)
Fターム[2F077AA01]に分類される特許
1 - 20 / 57
回転角度検出装置及びこれを用いた回転角度検出システム
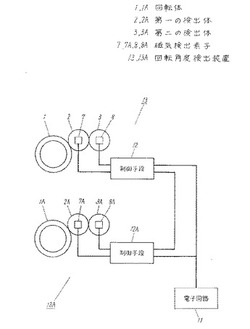
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
物理量検出装置、および物理量検出装置の検査方法

【課題】 出力波形の形状に影響されず補正の精確さを高める物理量検出装置、および物理量検出装置の検査方法を提供する。
【解決手段】ホール素子11は、ヨーク30の回転角の変化に応じた信号を出力する。DSP12は、予め記憶されている所定補正値に基づいてホール素子11の実出力値を補正し、補正された値に基づいてヨーク30の回転角を算出して出力する。所定補正値算出手段は、所定補正値を算出する。また、所定補正値算出手段は、所定回転角範囲内の実出力値に対して一次関数補間処理を行うことで算出される補間後実出力値と、当該補間後実出力値に対応する実出力値との差である一次誤差量に基づいて所定補正値を設定する
(もっと読む)
回転角度センサのフェール検知装置
【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
回転角度位置検出装置及びその誤差検出方法
【課題】簡易な構成でレゾルバから出力される多相出力信号に基づいて位置検出値を演算する位置信号演算部の検出誤差を求める。
【解決手段】ロータの回転角に応じて360°/N(Nは3以上の整数)毎の位相差を有するN相の位置信号を出力するレゾルバ30と、該レゾルバから出力されるN相位置信号が入力され、当該N相位置信号を信号処理して位置検出値を演算する位置信号演算部200と、前記レゾルバ及び前記位置信号演算部間と、当該位置信号演算部内との何れか一方に設けた前記N相位置信号の前記位置信号演算部のN相入力端子への入力を順次シフトさせたN段階に切換える信号切換回路61と、該信号切換回路で入力を切換える毎に、前記位置信号演算部から出力される位置検出値に基づいて検出誤差を計測し、計測した各検出誤差の平均値に基づいて前記位置信号演算部の検出誤差を算出する検出誤差算出部62とを備えている。
(もっと読む)
アナログ信号のデジタル変換方法
【課題】本発明は、負帰還制御系外に設けられていた減算器を排除し、負帰還制御系内に設けた加算器によって周波数変調信号を得ることにより、異常検出を容易化することを目的とする。
【解決手段】本発明によるアナログ信号のデジタル変換方法は、制御偏差演算部(4)に接続された負帰還制御系(6)における第2カウンタ(63)と第2擬似正弦波発生部(64)との間に設けられた加算器(20)により、位相基準(ωRt)とデジタル角度出力(φ)とを加算してなる周波数変調信号(ωRt+φ)を得ると共に、第2カウンタ(63)からのデジタル角度出力(φ)を直接出力する方法である。
(もっと読む)
アナログ信号のデジタル変換方法
【課題】本発明は、負帰還制御ループ外に設けられていた減算器を排除し、負帰還制御ループ内に設けた加算器によって位相変調信号を得ることにより、カウンタから直接デジタル角度出力を得ることができると共に、減算器の異常検出をしなくても負帰還制御ループの異常検出によってカバーできるようにすることを目的とする。
【解決手段】本発明によるアナログ信号のデジタル変換方法は、R/D信号変換部(3)に接続された励磁信号発生部(8)とカウンタ(7)との間に設けた加算器(20)により、カウンタ(7)からのデジタル角度出力(φ)と位相基準(ωRt)とを加算し、前記加算器(20)で得られた位相変調信号(ωRt+φ)を励磁信号発生部(8)に入力し、カウンタ(7)からデジタル角度出力(φ)を直接出力する方法である。
(もっと読む)
回転検出装置
【課題】倍信号異常が生じている場合であれ、欠歯部の通過の有無を的確に判定することができる。
【解決手段】クランクポジションセンサ42は、シグナルロータ51の歯52が通過する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブセンサ62のサブ信号がハイレベルであり且つメインセンサ61のメイン信号が変化したとの条件が成立したときに同条件の成立時におけるメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、クランク信号間の時間間隔に基づいて欠歯部通過判定を行なう。また、一つの歯52が通過する毎にクランクポジションセンサ42から二つの信号が出力される倍信号異常が生じているか否かを判定し、欠歯通過判定に際して、倍信号異常が生じている旨判定された場合とそうでない場合とで、欠歯部通過判定の判定態様を変更する。
(もっと読む)
モータ磁極検出システムおよびホールセンサ
【課題】 低コストで信頼性向上を実現することのできる、モータ磁極検出システムを提供すること。
【解決手段】 モータ磁極検出システム10は、位置検出用マグネットの磁束を検出するためのホール素子IC11、12と、ホール素子IC11等で検出された信号を処理するための信号処理CPU3とを備えてなり、ホール素子IC11、12はモータの軸方向上に設けられる。信号処理CPU3には、ホール素子ICの11等の断線を検出するための断線検出手段を備える。また、断線検出手段により検出された断線信号に基づいて、当該断線したホール素子ICとは別のホール素子ICからの信号処理に切り替えるための切替手段をも備える。
(もっと読む)
レゾルバ信号変換方法
【課題】従来構成では、振幅変調信号用の処理手段及び位相変調信号用の処理手段を別個に準備する必要があり、部品コストが増大している。
【解決手段】本発明によるレゾルバ信号変換方法は、レゾルバからの第1振幅変調信号sinθ・f(t)に余弦波信号cosωRtを乗算することで第1乗算信号22aを生成するとともに、第2振幅変調信号cosθ・f(t)に正弦波信号sinωRtを乗算することで第2乗算信号23aを生成し、第2乗算信号23aから第1乗算信号22aを減算することで、位相変調信号20を得る。
(もっと読む)
絶対角度検出装置
【課題】誤差成分を相殺した真の位置検出信号を得ることができる絶対角度検出装置を提供する。
【解決手段】第1系統のコイルLA1〜LC1のコイル部LA11〜LC14および第2系統のコイルLA2〜LC2のコイル部LA21〜LC24を各系統の同相コイルがステータの中心点を挟んで点対象となるようにステータに配置し、各系統のコイルからの出力を3相/2相変換し、変換した変換出力をそれぞれ第1の角度信号及び第2の角度信号に変換し、第1の角度信号及び第2の角度信号の何れか一方の角度信号の座標のみを180°オフセットしたオフセット角度信号と、他方の角度信号との平均値を算出することにより、誤差成分を相殺した真の絶対角度位置信号を検出する。
(もっと読む)
回転角検出装置のための異常検出装置
【課題】レゾルバを用いた回転角検出装置の正常または異常を的確に速やかに検出する。
【解決手段】レゾルバ30は、正弦波信号により励磁されてロータ31のステータ32に対する回転角に応じて振幅変調されるとともに振幅の変化が互いにπ/2だけ位相の異なる正弦波相出力信号および余弦波相出力信号を出力する。正弦波相振幅計算部61および余弦波相振幅計算部62は正弦波相および余弦波相出力信号の振幅を計算し、回転角計算部63がこれらの振幅を用いて回転角θを計算する。異常判定部68は、前記各振幅の2乗和平方根が継続して所定の範囲内にないときレゾルバ30の異常を暫定的に確定する。この状態において、判定部68は、レゾルバ30が暫定的に正常であるとき、モータ制御部67と協働してモータを強制的に回転させ、計算された回転角がロータ31のステータ32に対する0〜2πに渡る回転を表したとき正常に復帰したと判定する。
(もっと読む)
回転角センサ、モータ、回転角検出装置、及び電動パワーステアリング装置
【課題】簡素な構成にて高精度の回転角検出が可能であるとともに磁極数の変更に対しても高い柔軟性を有する磁気式の回転角センサを提供すること。
【解決手段】回転角センサは、周方向に沿って複数の磁極が形成されたマグネットロータと、そのマグネットロータの同心円上に均等角度間隔で配置された3つのセンサデバイス33とを備える。また、各センサデバイス33は、スピン固定層の磁化方向が逆向きとなるように直列接続された一対のスピンバルブ型磁気抵抗素子37a,37bを有する3つのハーフブリッジ回路38(38u,38v,38w)を備える。そして、各センサデバイス33は、そのマグネットロータの回転に伴う磁束変化に基づき各ハーフブリッジ回路38が出力するセンサ信号Vu,Vv,Vwが、互いに電気角で120°の位相差を有するように構成される。
(もっと読む)
角度検出装置の誤差算出方法
【課題】各検出器の中心と、目盛盤の中心との間の中心誤差を算出することができる角度検出装置の誤差算出方法の提供。
【解決手段】角度検出装置1は、円盤状に形成されるとともに、中心から円周に向かって放射状に設けられる複数の目盛線を有する目盛盤11と、目盛盤11の円周に沿って配設されるとともに、径方向に対向するように配設され、目盛線を検出する2つの検出器12とを備える。そして、各検出器12による検出角度に基づいて、中心誤差δを算出する。
(もっと読む)
回転角検出装置および回転速度検出装置
【課題】磁気抵抗素子を用いた回転角検出装置では、回転角を検出する回転軸の基準位置と磁気抵抗素子の位置とを機械的に精度良く合わせることが困難であるという課題があった。
【解決手段】回転軸を一定速度で回転させることで回転角検出装置を電気的に校正することで、計測精度が高い回転角検出装置を提供する。
(もっと読む)
アブソリュート型リニアエンコーダとリニアエンコーダとアクチュエータ
【課題】 信頼性が高くてコンパクト化が可能であり、且つ、低コスト化が容易なアブソリュート型リニアエンコーダとリニアエンコーダ、それらアブソリュート型リニアエンコーダまたはリニアエンコーダを搭載したアクチュエータを提供すること。
【解決手段】 位相検出用リニアスケールと位相検出用リニアスケール用検出器を主構成とする位相検出用リニアスケール部と、PN符号系列アブソリュートリニアスケールとPN符号系列アブソリュートリニアスケール用検出器を主構成とする位相検出用スケールと位相検出用検出器を主構成とするもの。
(もっと読む)
センサ装置
【課題】本発明は、センサ装置の信頼性を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、処理回路部14A、14Bからのセンス信号を出力する第1の出力端子15A、15Bと、駆動回路部11A、11B、検知素子12A、12B、検出回路部13A、13B、及び処理回路部14A、14Bの内少なくともいずれか1つを被故障診断部とし、被故障診断部が正常か異常かを判断するとともに異常と判断した場合には故障検知信号を第2の出力端子16Aから出力する故障診断回路16と、を備え、被故障診断部からの故障検知信号に関する出力が第2の出力端子16Aにたどり着くまでの時間が、被故障診断部からのセンス信号に関する出力が第1の出力端子15A、15Bにたどり着くまでの時間よりも短いセンサ装置としたものである。
(もっと読む)
センサ装置
【課題】ECU装置と一対の通信線を介し、ECU装置を主とする相互通信の構築及びセンサ装置への電力供給を可能とするセンサ装置であっても、検出精度を向上させたビット固着検出が可能なセンサ装置を提供する。
【解決手段】センサ装置3は、センサ21が出力したのと同様の信号を疑似信号として生成する疑似信号生成手段と、A/D変換器11への入力をセンサ21の出力信号と疑似信号生成手段の疑似信号とで切替える切替え手段と、切替え手段による切替えを介して疑似信号生成手段の疑似信号をA/D変換器11へ入力すると共に、A/Dレジスタ11bよりA/D変換後のデジタル値を読み出し、疑似信号に対応する所定範囲内の値か否かを判定することでA/Dレジスタ11bのビット異常を検出するビット異常検出手段とを備える。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 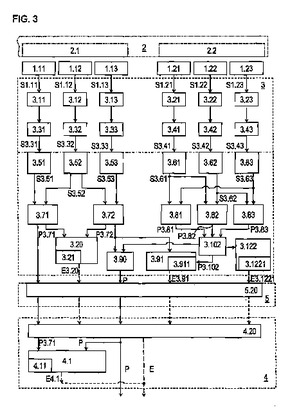 (もっと読む)
(もっと読む)
位置検出装置
【課題】検出対象の変位を検出する検出回路に発生した異常をその動作電源をオンした際に即時に検出することができる位置検出装置を提供すること。
【解決手段】電源がオンされると、マイクロコンピュータ23は、まず第1ラインL1(出力端子−Vo1)をグランドに接続し、次に第2ラインL2(出力端子+Vo1)をグランドに接続し、最後に第1ラインL1(出力端子−Vo1)及び第2ラインL2(出力端子+Vo1)をグランドに接続する。マイクロコンピュータ23は、これら3つの接続状態としたときに、第1差動増幅回路26から出力される信号の電圧レベルと正常時に前記3つの接続状態としたときの出力信号の電圧レベルとの比較を行い、正常時と異なった電圧レベルの信号が入力されたときには第1磁気センサ20若しくは第1差動増幅回路26に異常があると判断する。
(もっと読む)
1 - 20 / 57
[ Back to top ]