
Fターム[2F077TT41]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 内挿、補間 (427)
Fターム[2F077TT41]の下位に属するFターム
2相信号によるもの (254)
多相信号によるもの (28)
振幅分割によるもの (6)
位相分割によるもの (10)
逓倍又は分周回路を用いるもの (38)
時間分割によるもの (6)
ROM、メモリを用いるもの (61)
Fターム[2F077TT41]に分類される特許
1 - 20 / 24
ブラシレスDCモータの回転子位置検出方法とその装置
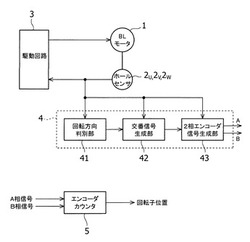
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
目盛誤差算出装置、目盛誤差校正装置、及び目盛誤差算出方法

【課題】検出器の数を最小限にとどめながら、精度の高い目盛誤差を算出できる目盛誤差算出装置を提供する。
【解決手段】目盛誤差算出装置4は、回転軸22に支持された目盛盤2、及び目盛盤2に配設された4つの検出器3とを備えた目盛誤差校正装置1に用いられる。この目盛誤差算出装置4は、4つの検出器3で検出された各検出値に所定の係数をそれぞれ掛けて線形和を演算する検出値合成手段41と、検出値合成手段41にて演算された線形和のフーリエ成分に基づいて、目盛誤差のフーリエ成分を同定するフーリエ成分同定手段42とを備える。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
角度検出装置およびその偏心量推定方法
【課題】特殊な目盛盤を必要とせず、二次元平面で偏心する目盛盤の偏心量をも正確に測定することができる角度検出装置およびその偏心量推定方法を提供すること。
【解決手段】回転軸13に支持された目盛盤12と、目盛盤12の表面に近接されかつ目盛盤12の周方向に等間隔で配置された3個以上の検出器14とを有する角度検出装置において、目盛盤12を所定の初期位置から基準角度θN回転させた際の回転角度θiを各検出器14で検出し、回転角度と基準角度との差から各検出器における角度誤差を測定し、回転中心Oaに対する各検出器の方向ベクトルPiを90度回転させて接線方向ベクトルqiを取得し、接線方向ベクトルqiとの内積が角度誤差になる偏心ベクトルeを演算する。
(もっと読む)
エンコーダ及びエンコーダの位置検出方法
【課題】位置情報の検出精度を高めることができる。
【解決手段】識別符号の基本間隔と同じ間隔の第1パターンを1周期含む第1の符号と前記基本間隔の半分の間隔の第2パターンを2周期含む第2の符号とを有する符号板(10)と、前記第1の符号と前記第2の符号とを検出して検出信号を出力する検出部(30)と、前記検出信号に基づいて、前記符号板(10)の位置を示す位置情報を生成する位置情報生成部(90)と、を備える。
(もっと読む)
インデックスセンサ
【課題】外部環境によらず、正しい回転基準位置の検出が可能なインデックスセンサを提供する。
【解決手段】回転体12の外周側の所定位置に取り付けられ径方向外方に向けて磁束を発生させる磁束発生手段13と、回転体12を臨むことができる静止系の所定位置に設置され、前記磁束を回転体12の回転軸Cに直交するY方向の磁束成分と、該Y方向の磁束成分と回転軸Cがなす面に直角なX方向の磁束成分とを独立に検出する磁気検出手段14と、磁気検出手段14が検出したY方向の磁束成分及びX方向の磁束成分から磁束の向きを演算する演算手段15と、前記磁束の向きに基づいて回転体12の所定位置が静止系の所定位置から所定回転角範囲内にあることを示す回転基準位置信号を発生させる回転基準位置信号発生手段16とを備える。
(もっと読む)
回転位置検出装置及びそれを用いたモータ駆動システム
【課題】低コストで信頼性が高く、かつ、小型化が容易な回転位置検出装置を提供する。
【解決手段】レゾルバ1は、突極の数が2n−1(nは正の整数)であるロータ、等角度間隔で順次配列する第1、第2、第3及び第4の磁極を有したステータ、及びステータの各磁極に巻着した単一のコイル(L1〜L4)を有する。励磁手段9、18は、第1、第2のコイルL1、L2の接続点に所定周波数の第1の励磁信号を供給し、第3、第4のコイルL3、L4の接続点に第1の励磁信号を反転した第2の励磁信号を供給する。信号処理手段7は、第1、第3のコイルL1、L3の接続点からの第1の出力信号と、第2、第4のコイルL2、L4の接続点からの第2の出力信号とに基づいてロータの回転位置を算出する。
(もっと読む)
位置検出装置
【課題】位置センサのセンサ信号を位置情報に変換する位置検出装置において、高速回転に応答ができ、位置バタツキの少ない高精度な位置検出装置を提供する。
【解決手段】位置センサからのセンサ信号をデジタル化した信号DS,DCは、それぞれデジタル低域通過フィルタにより、高域成分がカットされた信号FC、FSとして出力する。選択手段は、選択指令手段からの選択指令信号SELによって、信号DS,DC又は信号FC、FSのどちらかが選択され、信号SC,SSとして出力する。選択手段が選択した信号SC,SSは、内挿手段で2変数を入力とする逆正接演算が行われ、位置センサの入力軸の回転量を示す位置信号POに変換する。遅延補償手段では、位置信号POから速度信号VELに、低域通過フィルタのカットオフ周波数に応じた係数を乗算した遅延量を加算し、遅延補償位置POCとして出力する。
(もっと読む)
現在位置特定装置及び現在位置特定方法
【課題】被駆動体の電源遮断後における再起動時に最終出力端の現在位置を特定可能な現在位置特定装置及び方法を提供する。
【解決手段】被駆動体16を減速機15を介して駆動する駆動モータ10と、減速機の出力軸15aに取り付けられ出力軸の回転位置を検出する第1のアブソリュート型エンコーダ11と、駆動モータのモータ軸に接続され駆動モータの回転位置を検出する第2のアブソリュート型エンコーダ12とを備え、駆動モータへの電源投入により、駆動モータの現在位置を含む原点からの所定区間を出力軸の回転位置として第1のアブソリュート型エンコーダの出力から特定し、駆動モータの1回転内の回転位置を第2のアブソリュート型エンコーダの出力から特定し、出力軸の回転位置と駆動モータの回転位置とから駆動モータの原点からの現在位置を特定する位置特定演算手段を備えている。
(もっと読む)
絶対角度符号部及び絶対位置測定装置
絶対角度符号部(1)は、一つのトラックで構成されている。そのトラックでは、第一の符号シーケンス(A)の一つの部分と第二の符号シーケンス(B)の一つの部分が交互に配置されている。これらの符号シーケンス(A,B)は、異なる長さを有し、二つの符号シーケンス(A,B)の長さは、有利には、1だけ異なる。角度符号部(1)の一回転内の絶対位置(POS)を一義的に検出するために、二つの符号シーケンス(A,B)の各々に対して、復号用の専用のテーブル(TA ,TB )を有する復号器(3)が配備されている。それらにより得られた二つの符号シーケンス(A,B)内の部分分割位置(xA ,xB )から、絶対位置(POS)を算出している。  (もっと読む)
(もっと読む)
位置検出装置および位置検出方法、並びに回転角度位置検出装置および回転角度位置検出方法
【課題】小型化を図り、メモリ容量を低減するのに好適な位置検出装置を提供する。
【解決手段】中継装置200は、RDC64のサンプリング周期よりも長い間隔で作成された粗補正データを記憶するメモリ66を備え、レゾルバ信号をサンプリングして得られるデジタル角度信号値を取得し、取得したデジタル角度信号値のうち対応デジタル角度信号値を粗補正データに基づいて補正し、対応デジタル角度信号値以外のデジタル角度信号値について、そのデジタル角度信号値の時系列上前後にそれぞれ位置する粗補正データを補間し、その補間結果に基づいてそのデジタル角度信号値を補正する。
(もっと読む)
回転検出装置
【課題】エンコーダパターンの継ぎ目に複雑な処理が必要で無く、円周面を有する被検出体に容易に装着できる、高検出精度の回転検出装置を提供する。
【解決手段】エンコーダパターン11aを保持する円環状のパターン保持部11を有し、回転を検出すべきドライブシャフト1に支持されるパターン支持部材12と、パターン支持部材12が回転するとき、パターン回転円周上の特定の回転検出位置でそのパターン変化を検出する検出手段20とを備えた回転検出装置において、パターン支持部材12が、それぞれ円弧状断面を有する複数の分割体31、32によって構成され、分割体31、32が互いに結合され、検出手段20が、パターン11aが回転する円周上で分割体31、32の円弧状断面の中心角とは異なる離間角度θsを隔てる複数の回転検出位置P1、P2にてそれぞれパターン11aの変化を検出する複数の検出部21、22を有する。
(もっと読む)
絶対角度演算装置
【課題】角度演算時間の短縮化を図り、もって、精密な絶対角度位置を測定可能な絶対角度演算装置を提供する。
【解決手段】この発明の絶対角度演算装置は、光電変換信号列に含まれている空間変調成分に基づいて絶対角度位置を演算する演算回路11を有する。演算回路11は、絶対角度位置を補間するために演算に要する絶対角度演算時間よりも短い設定時間の間に得られた前回の光電変換信号列と今回の光電変換信号列とを保存する光電変換信号列保存部14と、光電変換信号列保存部14に保存されている前回の光電変換信号列と今回の光電変換信号列との相関を検出してそのずれ量を検出する相関検出回路15と今回得られたずれ量に基づいて前記パターン間の絶対角度位置相当値を内挿する内挿演算回路とを有する。この演算回路11は、ずれ量と絶対角度位置相当値とに基づき内挿角度を算出して、前回得られた絶対角度位置に今回得られた内挿角度を加算して、現在の絶対角度位置を求める。
(もっと読む)
モータ制御装置およびモータ制御システム並びにモータ制御装置の制御演算処理方法
【課題】 外部信号入力時の位置データを少ないハードウェア素子で求める。
【解決手段】モータ駆動回路(11)と、エンコーダの検出信号を受信して位置データを生成する受信回路(12)と、第1クロック信号をカウントし低周波の第2クロック信号をうけてカウント値を出力するカウンタ(13)と、入力された位置指令と位置データをモータの制御演算処理し第2クロック信号に同期して指令を出力するCPU(10)と、からなるモータ制御装置(1)において、カウンタは、外部信号Sdを入力するとその時の外部信号入力時カウント値Nxを出力し、CPU(10)は、カウンタが出力した外部信号入力時カウント値Nxと、外部信号Sdを入力する直前にカウンタが出力したカウント値N0およびそのときの位置データP0と、外部入力を受けた直後に出力したカウント値N1およびそのときの位置データP1とから、外部信号入力時の位置データPxを求める。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 余分な動作や手続きを要することなく、ABZ相信号を用いて絶対角度情報を出力できる回転検出装置、およびこの回転検出装置を組み込んだ回転検出装置付き軸受を提供する。
【解決手段】 回転する部材の回転角度を絶対角度で検出する絶対角度検出センサ3と、この絶対角度検出センサ3が検出した絶対角度に基づき、前記絶対角度検出センサ3の零相であるインデックス信号、および一定間隔のパルス信号を含む回転パルス信号を生成する回転パルス信号生成手段7とを設ける。絶対角度出力モード実行手段8により、前記回転パルス信号を、前記インデックス信号を出力してから現在の絶対角度まで出力するモードである絶対角度出力モードで出力する。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】時間遅れによる誤差が無い回転検出装置、及びこの回転検出装置を組み込んだ検出装置付き軸受を提供する。
【解決手段】回転側部材に、その回転中心周りの円周方向異方性を有する磁石2を設ける。この磁石2に対し前記回転側部材の回転中心の軸方向に対向して、複数の磁気センサ素子が平面的に並ぶ磁気センサ5を固定側部材に配置する。この磁気センサ5の各磁気センサ素子の出力から前記磁石2の磁界強度を計測し、その計測値を基に回転側部材の回転角度を検出する角度算出手段6を設ける。前記磁石2の磁界が磁気センサ素子で検出されてから前記角度算出手段6で検出角度が出力されるまでの遅延時間を補正する遅延時間補正手段7と、磁界のサンプリング間隔を補間して角度の変化分を演算する補間手段8を設ける。また、これら遅延時間補正手段7による遅延時間補正、および補間手段8による補間処理がされた回転角度を出力する出力手段9を設ける。
(もっと読む)
制御装置および制御方法
【課題】 被駆動体の速度の検出精度を高め、駆動手段を安定して制御する制御装置および制御方法を提供する。
【解決手段】 エンコーダ信号制御部25は、立上りエッジ間隔カウント部38によって計時される立上り計時時間と、立上りエッジ間隔履歴部39に記憶される最新の立上りエッジの立上り周期との時間の長さを比較し、その比較結果に基づいて、立上り計時時間または立上り周期のいずれか長い方の値を出力するので、高精度にパルス信号36の周期を予測して、リアルタイムに近似することができ、これによって高精度に出力されたパルス信号36の周期に基づいて、被駆動体の速度を高精度に算出することができ、被駆動体の速度の検出精度を高めることができ、駆動手段を安定して制御することができる。
(もっと読む)
エンコーダ
【課題】位置測定の誤差が確実にかつ可能な限り僅かな経費で排除されるアブソリュート式エンコーダを提供する。
【解決手段】シリアルコードCのコード要素C1〜C5が、それぞれ多数の走査要素D1〜D6によって走査され、確実な走査を保証する走査要素D1〜D6が、異なる選択方法A1、A2によって選択される。こうして得られた位置測定値POS1、POS2が、互いに比較されて誤差検査を実施する。
(もっと読む)
1 - 20 / 24
[ Back to top ]