
Fターム[2F077TT42]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 内挿、補間 (427) | 2相信号によるもの (254)
Fターム[2F077TT42]に分類される特許
1 - 20 / 254
回転角度検出装置
レゾルバ及びレゾルバの製造方法
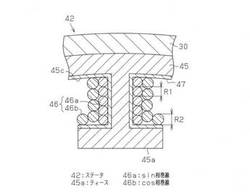
【課題】高い検出精度を確保しつつも、小型化を図ることのできるレゾルバを提供する。
【解決手段】このレゾルバは、sin相巻線46a及びcos相巻線46bが巻回された複数のティース45aがロータを囲繞するようにして設けられたステータ42と、ロータに設けられて各相の巻線46a,46bに付与する磁界を形成する励磁巻線とを備える。そして、このレゾルバでは、ロータが回転するとき、励磁巻線により形成される磁界の変化に基づき各相の巻線46a,46bに誘起される電圧が変化することにより、各相の巻線46a,46bからロータの回転角に応じた電圧信号が出力される。ここでは、ティース45aに、sin相巻線46aが巻回されるとともに、その外側にsin相巻線46aよりも大きい線径を有するcos相巻線46bが巻回される。
(もっと読む)
エンコーダ搭載機器およびエンコーダ装置

【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
回転電機
【課題】回転電機において、レゾルバを用いなくても回転子の回転角度等を検出できるようにすることである。
【解決手段】回転電機10は、予め定めた周方向配置に従って配置される複数の磁極を有するロータ20と、コイル巻線36を収容し、ロータ20に向かって開口部34を有する複数のスロット32を含むステータ30を備える。スロット32の開口部34には開口部用の絶縁体40が配置され、開口部用の絶縁体40には、ステータ30に対しロータ20が回転するときにロータ20の磁極からの磁束の変化に応じて発生する起電力を出力するセンサ導体42,44が設けられる。センサ導体42,44は、ロータ20の軸方向に垂直な断面からみて互いに異なる面方向を有する2つの導体で構成される。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】モータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、複数のセンサ信号を所定の複数のしきい値レベルと比較して位相を検出し、検出した位相を示す第1の位相情報信号を出力し、複数のセンサ信号どうしを比較して位相を検出し、検出した位相を示す第2の位相情報信号を出力し、第1の位相情報信号及び第2の位相情報信号に含まれる検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号の中から一つを選択し、前記選択されたセンサ信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、検出した位相を示す位相情報信号を出力する。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
車両のインホイールモータを用いた車輪速感知装置及びこの制御方法
【課題】 環境に優しい車両の走行のためのインホイールモータのレゾルバを車輪速センサの代わりに使用するようにした車両のインホイールモータを用いた車輪速感知装置及びこの制御方法を提供する。
【解決手段】 本発明によるインホイールモータを用いた車輪速感知装置は、車軸に連結され、車輪の内部に装着される走行用駆動モータのレゾルバと、レゾルバでセンシングしたモータ速度情報の入力を受けて車輪速度情報に変換させるインバータと、インバータから出力される車輪速度情報の入力を受け、車輪速度情報に基づいて作動する部品を制御する制御機と、を含むことを特徴とする。
(もっと読む)
レゾルバ及びレゾルバ付き転がり軸受装置
【課題】レゾルバの大型化等やコンピュータによる計算負荷の増大を招くことなく、回転角度の誤差(角度誤差)を低減し、検出精度を高めることができるレゾルバを提供する。
【解決手段】励磁用及び出力用のコイルが設けられた環状のレゾルバステータ12と、回転軸11に取り付けられて前記レゾルバステータ12の径方向内方に配置され、当該レゾルバステータ12の内周面との径方向のギャップが周方向で変化する外周面を有しているレゾルバロータ13と、を備えているレゾルバ10であって、前記レゾルバステータ12の内周面とレゾルバロータ13の外周面との間の最小のギャップをδ1、最大のギャップをδ2としたとき、δ1に対するδ2の比率が、6.0≦(δ2/δ1)≦9.0に設定されている。
(もっと読む)
回転情報算出装置、ステアリング装置、電動パワーステアリング装置、センサ付き軸受装置、車両、異常検出装置、回転情報算出方法及び異常検出方法
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 磁気センサ10は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号及びB相出力信号のそれぞれにおいて、サンプリング値とそれを180度シフトしたサンプリング値の差が最小となる同一位相のサンプリング値を抽出し、前記抽出したサンプリング値の平均値をオフセット補正値として計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正して検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
変位検出装置、制御装置、工作機械装置、照射装置および変位検出方法
【課題】エンコーダ等の変位検出手段により検出される変位の誤差を低減する。
【解決手段】アクチュエータ17の出力としての変位を検出する変位検出手段10を含む変位検出装置であって、振動する駆動指令Tmがアクチュエータ17に供給されて変位検出手段10により検出された変位の振幅と駆動指令Tmの振幅との比を変位の予め定められた範囲にわたって複数得、得られた複数の比に基づいて、変位検出手段10により検出された変位を補正する補正手段18を有する。
(もっと読む)
エンコーダ
【課題】被計測物の絶対位置を高精度に計測可能なエンコーダを提供する。
【解決手段】エンコーダ100は、被計測物とともに移動可能に構成されたスケール1と、異なるピッチのパターンを有するトラック11と、スケール1に対する相対的な変位を検出して第1および第2の2相正弦波信号を出力する第1および第2のセンサ21、22と、第1および第2の2相正弦波信号に基づいて前記第1および第2のセンサ21、22に対応する第1および第2の位相をそれぞれ算出する位相演算手段31、32、61、62と、第1および第2の位相の位相差に基づいて被計測物の粗位置を計測する粗位置計測手段41と、被計測物の粗位置に基づいて第1および第2の2相正弦波信号に含まれる位相差誤差を補正する補正手段51、52と、補正手段51、52で補正された第1および第2の2相正弦波信号に基づいて被計測物の絶対位置を計測する位置計測手段71とを有する。
(もっと読む)
高分解能非接触式多回転検出システムおよび方法
【課題】高分解能で非接触の態様でシャフトの多回転位置を計測するシステムおよび方法を提供すること。
【解決手段】一実施形態で、多回転検出装置は、シャフトによってなされた回転数を決定するように構成された回転カウンタと、所定の回転の中でシャフトの角度位置を計測するように構成された角度位置センサとを含むことが可能である。回転数は、Mビットの分解能によって決定可能であり、1回転当たりの角度位置は、Nビットの分解能によって計測可能である。適切に選択されているので、回転カウンタは、比較的低い分解能として作動するように構成可能であるが、多回転検出装置は、全範囲にわたって1回転当たりNビットの角度分解能を維持することが可能である。したがって、多回転検出装置はM+Nビットの実効分解能を有することが可能である。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
1 - 20 / 254
[ Back to top ]