
Fターム[2F105AA03]の内容
Fターム[2F105AA03]に分類される特許
281 - 297 / 297
力に依存するジャイロスコープの感度を測定する方法
ジャイロスコープの出力に関する加速度の効果の力効果モデルが決定される。それから、回転シーケンスは、これらのパラメータの較正情報を提供するために、力効果のモデルのパラメータを励起し、観察することを許すよう考案される。ジャイロスコープの力効果モデルのパラメータを含む状態ダイアグラムは、状態ダイアグラムにおいてある位置から別の位置に移ることにより、対応する動きにしたがってジャイロスコープのトライアドが回転することで起きるジャイロスコープのエラーを示す力効果モデルに由来する。状態ダイアグラムを通して達成可能な、全てのあり得るクローズドなループパスを、指定された回転数だけ回数させた複数の軸を持つレートテーブルを用いることで、ジャイロのトライアドのエラー較正を加速度の較正から分離する。最小限の長さを有し、より大きなエラー感度を示すクローズドなループパスは、エラーのパラメータを較正し、力に依存するジャイロスコープの感度を下げるために選択される。  (もっと読む)
(もっと読む)
角速度センサ

【課題】車両のピッチ軸、ロール軸、ヨー軸の3つの回転軸の内、少なくとも2つの回転軸に対する角速度を算出することができ、小型化を可能にするとともに、特性を向上した角速度センサを提供することを目的としている。
【解決手段】X軸方向に第1振動子4と第2振動子5の第2アーム3を駆動振動させ、Z軸周りの角速度は、Y軸方向への第1振動子4または第2振動子5の第1アーム2の屈曲振動を検知して算出し、Y軸周りの角速度は、Z軸方向への第1振動子4または第2振動子5の第1アーム2の屈曲振動を検知して算出する構成である。
(もっと読む)
角速度センサ

【課題】基台およびカバーの内側に収納された音叉部が傾いて、出力特性が不安定になるということはなく、常に特性が安定している角速度センサを提供することを目的とする。
【解決手段】基台30における端子33を回路基板35に、基台30と回路基板35との間に間隙38が存在するように固着し、かつこの間隙38に位置する前記基台30における端子33に屈曲部33bを設け、この屈曲部33bにより高い周波数の外部からの振動を吸収する構成としたものである。
(もっと読む)
安定したスケール因子の固体レーザージャイロ
本発明の分野は回転速度又は角度位置の測定に用いられる固体のレーザージャイロに関する。このタイプの装置は特に航空の用途に使用される。レーザージャイロの性能は4A/λ.Lに等しいそのスケール因子Sの温度安定性に依存し、L及びAはそれぞれ光路長及びレーザー空洞の面積であり、そしてλはサニャック効果のないレーザー発光の平均波長である。従来、ガスレーザーにおいて、スケール因子の各パラメータは温度と無関係になるように選定される。ガスレーザーとは非常に異なる性質の固体レーザーにおいては、このようにすることが出来ない。本発明はスケール因子の全体的維持に基づくレーザー空洞の光学的構造を提案し、それは各パラメータが温度と共に変化することを可能にする。それは又同時に光学モードホッピングの回避を可能にする構造も提案している。本発明による原理が標準材料に適用可能であることを示す幾つかの数値例が用意されている。 (もっと読む)
航空機の前脚の向きを測定する方法とデバイス
デバイス(1)は、航空機の方向を測定するための慣性基準ステーション(7)と、前脚の車輪へ固定システムによって取り付けることができ、非操向位置における上記前脚の向きを測定するために使用される慣性基準ユニット(9)と、前脚の向きの測定値と航空機の向きの測定値との比較を、上記前脚の航空機機体に対する方位が計算されるようにして実行するための手段(12,13)を備えるデータ処理ユニット(11)と、を備える。 (もっと読む)
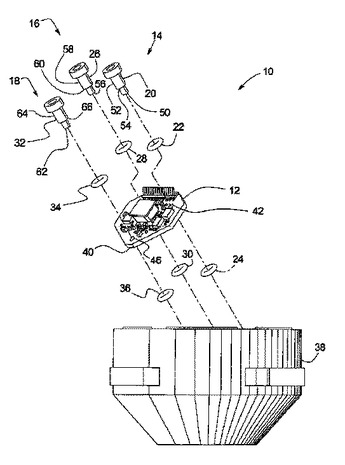
MEMS構造内でプルーフマスの運動を減速させる方法およびシステム
微小電気機械システム(MEMS)デバイス(10)が述べられ、MEMSデバイス(10)は、少なくとも1つのアンカを有する基板(110)と、プルーフマス(12)を含み、プルーフマスから延びる少なくとも1つの減速伸張部(66)か、プルーフマス内に形成される少なくとも1つの減速くぼみ部(158)のいずれかを有し、モータドライブコム(18)と、モータセンスコム(20)とを含む。MEMSデバイスはさらに、プルーフマスを、基板の上で、かつ、モータドライブコムおよびモータセンスコムの間に懸垂保持する複数のサスペンション(14)を含み、サスペンションは基板に固定される。MEMSデバイスはまた、基板に取り付けられた本体(60)と、本体から延びる少なくとも1つの減速梁(64)とを含む。減速梁伸張部は、減速梁か、減速くぼみ部のいずれかに係合し、プルーフマスが、モータドライブコムか、モータセンスコムのいずれかに接触する前に、プルーフマスを減速または停止させる。  (もっと読む)
(もっと読む)
振動数検出を用いたマイクロジャイロメーター
【課題】 従来技術の欠点を克服する。
【解決手段】 本発明は、ジャイロメーター(10)の平面(X,Y)に沿って自由に動くことができる質量体(12,12')の振動方向(X)に対して垂直な角運動(Ω)によって生じるコリオリの力の検出に基づく(有利なことには既存のマイクロ電子技術を用いて機械加工された)マイクロジャイロメーター(10)を提案する。コリオリの力は、可動デバイス(20)に接続された共振子(22)の固有モードに適合する運動を通して検出される。
(もっと読む)
姿勢計測方法、姿勢制御装置、方位計及びコンピュータプログラム
【課題】 従来よりも短い時間で物体の姿勢又は真北を含む方位を計測することができる姿勢計測方法、姿勢計測装置、方位計及びコンピュータプログラムを提供する。
【解決手段】 本発明のカルマンフィルタの時間更新では、姿勢計測装置の姿勢をクオータニオンを用いて表した状態変数xの推定値xk(-)ハット及び誤差共分散Pk(-)は、時間に対して不変であるとして前ステップの観測更新で得られた値と等しいとする。また観測更新では、ジャイロ及び加速度センサを用いて互いに直交する各3軸回りの角速度及び各3軸方向の加速度を測定し、測定した角速度及び加速度の値を観測値zk として状態変数の推定値xk(+)ハット及び誤差共分散Pk(+)を計算する。誤差共分散が十分小さくなるまでカルマンフィルタの処理を繰り返し、姿勢を示す状態変数を得る。
(もっと読む)
カップリングバネを備えたMEMSジャイロスコープ
【課題】 カップリングバネを備えたMEMSジャイロスコープが開示される。
【解決手段】カップリングバネを備えたMEMSジャイロスコープは、基板の板面方向の垂直方向に沿って基板について相対移動可能な対称構造の複数質量体と、複数質量体との間に接続され、複数質量体のいずれか1つが所定の垂直方向に移動すれば、他方の1つを所定垂直方向と逆方向に移動させるカップリングバネとを含むことを特徴とする。
(もっと読む)
光ファイバジャイロスコープ色雑音を減らすシステムおよび方法
位相ジャンプ振幅およびタイミングコントローラが、色雑音を抑制するために光ファイバジャイロスコープで使用される。位相ジャンプ振幅およびタイミングコントローラは、光ファイバジャイロスコープのループ閉エレクトロニクスのフィードバック信号に位相/電圧ジャンプを挿入する。この位相/電圧ジャンプが、駆動信号の反復パターンを壊す。IOC時間依存特性は、反復信号がIOCに印加されないので、ランダム化されたフィードバック信号によって完全に除去される。ランダム化された振幅は、光学誤差の平均が0になるように、±π位相全体の中にあることが好ましい。関心を持たれているスペクトル領域より高い固定周波数が、色雑音をより高い周波数にシフトすることができる。ランダム化された周波数が、色雑音を全スペクトルに拡散させ、RDSを完全に除去することができる。言い換えると、駆動回路およびIOCの非線形性によって引き起こされる色雑音が、広範囲のスペクトルに拡散され、明瞭な周波数ピークがスペクトル領域に現れなくなる。 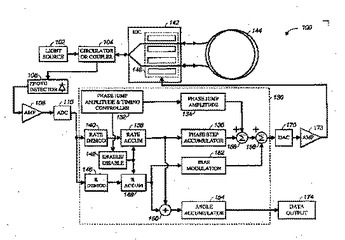 (もっと読む)
(もっと読む)
角速度センサ
振動子の質量バランスを加味して角速度を正確に算出することができる角速度センサを提供する。 軸部21に一対のアーム部22を有し、圧電素子からなる音叉型の振動子23と、この振動子23を駆動させ、振動子23に与えられた角速度を検出する制御回路部24とを備え、制御回路部24は、振動子23に角速度が生じていない場合に、角速度が生じていると誤って検出したセンス信号29の信号成分をノイズ信号成分として、センス信号29の信号成分から除去するための補正信号を生成する補正回路部35を備えている。 (もっと読む)
振動構造ジャイロスコープにおけるバイアス誤差を低減する方法
【課題】振動構造ジャイロスコープにおけるバイアス誤差を低減する方法
【解決手段】振動構造体(1)と、振動構造体(1)をキャリアモード共振にする1次駆動手段(2)と、キャリアモード運動を検知する1次ピックオフ手段(3)と、印加される回転速度に応じて振動構造体(1)の応答モード振動を検出する2次ピックオフ手段(10)と、応答モード運動の閉ループ1次制御ループを制御する力を印加して、1次ピックオフ手段(3)において固定振幅運動を維持し、かつ駆動周波数を共振極大に維持する2次駆動手段(16)と、2次ピックオフ手段(10)においてゼロを維持する2次制御ループとを有する、振動構造ジャイロスコープにおけるバイアス誤差を低減する方法。この方法においては、2次制御ループからSFIN−PHASEに対するSFQUADの比を測定して、関係式SFQUAD=SFIN−PHASE×Sin(φSD+φPPO)にもとづいて、Sin(φSD+φPPO)の直接測定値を得る。ここで、SFQUADは直交スケールファクタ、SFIN−PHASEは同相スケールファクタ、φSDは2次駆動手段における位相誤差、φPPOは1次ピックオフ手段の位相誤差である。全体位相誤差φEを、関係式φE=φSD+φPPOと、2次駆動手段(16)及び/又は1次ピックアップ手段(3)に適用される位相補正とにもとづいて、測定されたSin(φSD+φPPO)から直接得ることにより、位相誤差φE、したがって直交バイアス誤差を低減して、ジャイロスコープの性能を改良する。
(もっと読む)
ボアサイティング装置用ジャイロシステム
基準線と、基準線を基準としてアライメントされる機器との間で、平行および非平行の線を移動させるためのジャイロシステムが提供される。このシステムは、実質的に固定型に構成された第1の慣性センサを含み、第1の慣性センサは、出力信号を生成するように構成された第1の3軸ジャイロセンサと、反射器とを含む。第2の慣性センサは、第1の慣性センサに隣接して配置可能なように、携帯型に構成され、そして、2本の物理軸に制限されたジンバルと、ジンバル駆動システムと、電磁エネルギービーム発生器と、出力信号を生成するように構成された第2の3軸ジャイロセンサと、コリメータとを含む。コリメータは、ビーム発生器により投射されたビームと、反射器から反射されたビームとの間の角度を決定し、決定された角度を示す出力信号を生成するように動作可能である。制御回路は、コリメータと、第1および第2の3軸ジャイロセンサとによって生成された出力信号を処理し、第1および第2の慣性センサの互いに対する相対的な向きを決定するように動作可能である。  (もっと読む)
(もっと読む)
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
音響光学装置により安定化されたソリッドステート・レーザー・ジャイロ
本発明の分野はソリッドステート・レーザー・ジャイロに関する。この技術に固有の主要な問題の一つは、このタイプのレーザー・ジャイロの光キャビティが生来非常に不安定なことである。この不安定性を減らすため、本発明は音響光学装置を用いて、キャビティ(1)内へ伝播方向に依存する制御された光学的損失を導入することを提案している。異なる構成の音響光学装置を用いた各種の装置が記述されている。これらの装置はとりわけモノリシック・キャビティを有するレーザー・ジャイロ、そして特にネオジムでドーピングされたYAGレーザー・ジャイロに適用される。 (もっと読む)
発振回路及びこれを用いた角速度センサ
【課題】 電源電圧の変化や周囲温度の変化等の影響を受けない安定性の高い発振回路と、これを用いた角速度センサを提供する。
【解決手段】 電源を印加すると、起動補償回路24のゲインが大きく設定され、大きな駆動電圧Vaによって圧電振動子11が振動し、短時間に起動する。比較手段32から出力される制御電圧V32によってAGC回路25のゲインが制御されると共に、起動後の安定時には回路24のゲインが小さく設定され、出力電圧Voutが基準電源回路31の出力に対応して一定振幅になる様な駆動電圧Vaによって圧電振動子11が振動する。圧電振動子11に生じたコリオリ力による応力の検出信号が、同期検波回路44においてI/V変換回路21の出力信号によって同期検波され、圧電振動子11の角速度に応じた信号が検出される。
(もっと読む)
角速度センサ
【課題】 振動子素子を角速度センサとして使用する場合、周囲の温度変化、電源電圧の変化などによって励振振幅が安定していないと良好なセンサ特性(励振振幅を一定に保つのは困難)が得られにくく励振回路で振幅を調整する方法が採られていたが、励振回路に依存せず素子自体の励振振幅を安定する素子の実現を目的とする。
【解決手段】振動子素子の励振電極の存在するアームに、励振電極とは別に励振振幅検出用電極を形成する。励振電極に印加された励振振動信号によって、振動子素子の励振アーム内には交流電界が発生し、励振アームは所定の方向に振動し始める。この交流電界の変化を、励振振幅検出用電極で検出すると、励振振幅に応じた電圧となる。この電圧を励振回路の振幅比較手段に帰還させ、励振振幅調整手段を通して励振振動信号を調整することにより、励振振幅を安定させることができる。
(もっと読む)
281 - 297 / 297
[ Back to top ]