
Fターム[2F105AA03]の内容
Fターム[2F105AA03]に分類される特許
141 - 160 / 297
多軸ファイバジャイロ
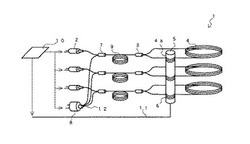
【課題】部品の共通化を実現する多軸ファイバジャイロを提供する。
【解決手段】複数の光源2と、複数の光ファイバループ4と、複数の第1光カプラ3と、複数の第2光カプラ7と、複数の位相変調器6と、複数の偏光子9と、多芯フェルール付き受光素子8と、複数の光源2を時分割制御する時分割制御回路とを備えた。
(もっと読む)
光センサにおいて低速光を使用するためのシステムおよび方法
光センサは、少なくとも1つの光結合器と、少なくとも1つの光結合器に光学的に連通する光導波路とを含む。光導波路は、当該少なくとも1つの光結合器から第1の光信号を受取るように構成される。第1の光信号は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、回転、歪みまたは温度のような、光センサの少なくとも一部分への摂動によって影響される。 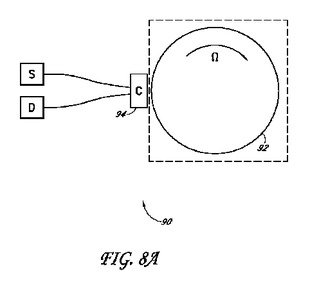 (もっと読む)
(もっと読む)
センサ

【課題】センサの小型化を図りつつ、バイアス信号を生成し、検出感度を向上させるセン
サを提供することを目的としている。
【解決手段】検出処理回路4は、駆動電極6に駆動信号を通電し検出素子2を振動させる
駆動回路12と、検出素子2に与えられる角速度や加速度に起因して検出電極10から出
力される検出信号に基づき、角速度や加速度を検出する検出回路14と、モニタ電極8か
ら出力されるモニタ信号に基づき、検出素子2の振動状態をモニタするモニタ回路16と
を備え、この検出信号には、検出素子2の周囲温度に起因して変化する温度依存性信号成
分が含まれているので、この温度依存性信号成分を相殺するバイアス信号成分を生成する
バイアス信号生成回路22を設けた構成である。
(もっと読む)
角速度センサ
【課題】本発明は、角速度センサを搭載する車両が高地を移動する等して角速度センサにおける振動子の傾き角が絶えず変化しても、角速度センサの出力信号が変動するということはなく、安定した出力信号が得られる角速度センサを提供することを目的とするものである。
【解決手段】本発明の角速度センサは、振動子11と、この振動子11を所定の振幅および周波数で振動駆動する駆動回路19と、前記振動子11に角速度が負荷された際にコリオリ力により振動子11に発生する電荷を増幅するとともに出力電圧に変換して出力する検出回路20とを備え、前記検出回路20に、角速度センサが取り付けられる被検出体の傾斜に応じて発生する出力誤差を補正する補正手段34を設けたものである。
(もっと読む)
加速度センサおよびその製造方法
【課題】静電容量変化にバラツキが生じにくく、検出精度の向上を図った加速度センサを提供することを目的としている。
【解決手段】加速度検出部を有する検出素子1を備え、この検出素子1は、可撓部を介して錘部2を連結した固定部4と、ギャップ規定手段により形成したギャップを介して錘部2と対向させた対向基板6と、錘部2と対向基板6の各々の対向面に配置した第1〜第4対向電極14、16、18、20とを有し、第1〜第4対向電極14、16、18、20の静電容量変化を検出して加速度を検出しており、ギャップ規定手段は、固定部4に感光性樹脂からなる突起部13を形成するとともに、突起部13に対向基板6を載置して形成した構成である。
(もっと読む)
加速度センサ
【課題】信号線に発生する静電容量を低減して、特性向上を図ったセンサの製造方法を提供することを目的としている。
【解決手段】加速度検出部を有する検出素子1を備え、この検出素子1は、可撓部を介して錘部2を連結した固定部4と、錘部2と対向させた対向基板6と、錘部2と対向基板6の各々の対向面に配置した第1対向電極〜第4対向電極14、16、18、20と、これら電極から引き出した信号線21とを有し、加速度検出部では、錘部2と対向基板6の各々の対向面に配置した第1対向電極〜第4対向電極14、16、18、20の静電容量変化を検出して加速度を検出しており、対向基板6と第1対向電極〜第4対向電極14、16、18、20または信号線21との間で発生する静電容量を抑制する抑制手段を設けた構成である。
(もっと読む)
慣性力センサ
【課題】検出感度を大きくした慣性力センサを提供することを目的としている。
【解決手段】加速度検出部と角速度検出部を有する検出素子1を備え、この検出素子1は、第1アーム8を第2アーム10に略直交方向に連結した2つの直交アームを有し、2つの第1アーム8の一端が支持部12にて支持され、2つの第1アーム8の他端が第1固定部4に連結され、第2アーム10の先端部に錘部が連結され、第1固定部4は固定アーム7にて第2固定部6と連結され、第1アーム8をX軸方向に配置するとともに第1固定部4にはX軸方向のみに弾性変形する第1弾性部9を設け、第2連結部である固定アームをY軸方向に配置するとともに第2固定部6にはY軸方向のみに弾性変形する第2弾性部11を設けた構成である。
(もっと読む)
角速度センサ
【課題】モニタ増幅信号と検出増幅信号の位相ずれを抑制した角速度センサを提供することを目的としている。
【解決手段】駆動電極32に駆動信号を通電し振動子31を振動させる駆動回路35と、慣性力に起因して検出電極34から出力される検出信号を増幅する検出信号増幅回路36と、モニタ電極33から出力されるモニタ信号を増幅するモニタ信号増幅回路37とを備え、モニタ信号増幅回路37は第1増幅器40と第1帰還抵抗41と第1帰還容量42とを有し、検出信号増幅回路36は第2増幅器43と第2帰還抵抗44と第2帰還容量45とを有し、モニタ電極33の電極面積と検出電極34の電極面積とを等しくすることにより、モニタ電極33で生成される静電容量値と前記検出電極34で生成される静電容量値とを等しくした構成である。
(もっと読む)
加速度センサ
【課題】信号線に発生する静電容量を低減して、特性向上を図ったセンサの製造方法を提供することを目的としている。
【解決手段】加速度検出部を有する検出素子1を備え、この検出素子1は、可撓部を介して錘部2を連結した固定部4と、錘部2と対向させた対向基板6と、錘部2と対向基板6の各々の対向面に配置した第1対向電極〜第4対向電極14、16、18、20と、これら電極から引き出した信号線21とを有し、加速度検出部では、錘部2と対向基板6の各々の対向面に配置した第1対向電極〜第4対向電極14、16、18、20の静電容量変化を検出して加速度を検出しており、全ての信号線21の端部を検出素子1の上面側または下面側のいずれか一方側に配置し、信号線21の端部にて実装基板と電気的に接続した構成である。
(もっと読む)
慣性力センサ
【課題】検出感度を大きくした慣性力センサを提供することを目的としている。
【解決手段】加速度検出部と角速度検出部を有する検出素子1を備え、この検出素子1は、第1アーム8を第2アーム10に略直交方向に連結した2つの直交アームを有し、2つの第1アーム8の一端が支持部12にて支持され、2つの第1アーム8の他端が第1固定部4に連結され、第2アーム10の先端部に錘部が連結され、第1固定部4は固定アーム7にて第2固定部6と連結され、第1アーム8をX軸方向に配置するとともに第1固定部4にはX軸方向のみに弾性変形する第1弾性部9を設け、第2連結部である固定アームをY軸方向に配置するとともに第2固定部6にはY軸方向のみに弾性変形する第2弾性部11を設けた構成である。
(もっと読む)
姿勢角計測装置及び該姿勢角計測装置に用いられる姿勢角計測方法
【課題】移動体の姿勢角を比較的小規模の構成で高精度に計測する姿勢角計測装置を提供する。
【解決手段】航法制御器8により、現在位置情報apに基づいて、移動体の第1の状態情報sa及び同移動体に対する制御目標に対応する指令信号caが出力され、レート推定器4により、加速度情報ac及び現在位置情報apに基づいて移動体の第2の角速度情報aqが推定され、判定器5により、第1の角速度情報aj及び第2の角速度情報aqに対して、信頼度情報raに基づいて精度の優劣が判定され、精度の優れている方が選択されて角速度情報amとして出力され、姿勢角決定器7により、加速度情報acに所定の演算が行われて第2の角度情報が算出されると共に、第1の角度情報anが入力され、信頼度情報raに基づいて、同第2の角度情報と第1の角度情報anとが周波数的に分解されて加演算が行われることにより、高精度の姿勢角atが決定されて出力される。
(もっと読む)
回転速度を測定するためのマイクロメカニクス上の慣性センサー
本発明は、検知のためにセンサーが回転される、回転Ωを検知するための回転速度センサーであって、前記センサーは、基材、及び基材表面の上側のx−y平面に、実質的に平面状に存在する駆動−及び検知構造を有し、駆動−及び検知構造は、駆動質量(4)と検知質量(3)を有し、これらは、検知構造の中心(Z)から異なる間隔で、中心(Z)の回りに対称的に配置され、そして、その振動モードは、部分的に相互に伝えられることが可能であり、及び部分的に分離され、回転Ωは、検知質量の、駆動−及び検知構造の平面からの傾きを検知することにより検知される回転速度センサーに関する。そして本発明は、両質量(3、4)の内、前記中心に対して、より大きな間隔を有する側のものは、コリオリの力の影響下に、前記平面からの傾斜が可能であり、及び結合手段(7)によって基材に結合され、これにより、前記傾きの戻り動作が、前記結合手段によって補助される、ことを特徴とする。本発明の結合手段により、センサーの、従属する環境作用に対する構成の強さが改良される。 (もっと読む)
角速度センサ素子および角速度センサ装置
【課題】基体を小さくした場合であっても、素子の感度を高くすることの可能な角速度センサ素子を提供する。
【解決手段】ケース4のセンサ素子支持部51の上面に固定される固定部20と、固定部20の両側に連結されると共にセンサ素子支持部51の上面と平行な面に沿って延在する上検出腕21および下検出腕22と、上検出腕21を間にして固定部20に連結されると共に上検出腕21の延在方向に延在する一対の上振動腕23とを備える。上検出腕21には一対の圧電素子21A,21Bがはみ出して設けられ、下検出腕22には一対の圧電素子22A,22Bがはみ出して設けられ、上振動腕23には一対の圧電素子23A,23Bがはみ出して設けられている。
(もっと読む)
角速度センサ素子および角速度センサ装置
【課題】横方向の加速度の影響を除去し易く、かつ固定部の固定が容易な、感度の高い横置き型の角速度センサ素子を提供する。
【解決手段】ケース4のセンサ素子支持部42の上面に固定される一対の固定部20と、センサ素子支持部42と平行な面に沿って延在する検出腕21と、センサ素子支持部42と平行な面に沿って延在すると共に検出腕21の延在方向と交差して互いに反対方向に延在する一対の上駆動腕22および下駆動腕23とを備える。検出腕21において、一端が一対の固定部20の一方に連結され、他端が一対の固定部20の他方に連結されている。上駆動腕22および下駆動腕23において、一端が検出腕21に連結され、他端が自由端となっている。
(もっと読む)
角速度センサ素子および角速度センサ装置
【課題】横方向の加速度の影響を除去し易く、かつ固定部の固定が容易な、横置き型の角速度センサ素子を提供する。
【解決手段】ケース4のセンサ素子支持部51の上面に固定される固定部20と、固定部20の両側に連結されると共にセンサ素子支持部51の上面と平行な面に沿って延在する上検出腕21および下検出腕22と、上検出腕21を間にして固定部20に連結されると共に上検出腕21の延在方向に延在する一対の上振動腕23とを備える。固定部20は、少なくとも上検出腕21の延在方向と交差する方向に延在する1または複数の溝部20Aを有する。
(もっと読む)
半導体レーザジャイロ
【課題】干渉縞を用いることなく回転の角速度を求めることが可能な半導体レーザジャイロを提供する。
【解決手段】本発明の半導体レーザジャイロは、レーザ光Lを出射する半導体レーザ10と、レーザ光Lをモニタする光検出器50とを備える。半導体レーザ10は、活性層を含む層で構成されたキャビティーと、活性層にキャリアを注入するための第1および第2の電極とを備える。キャビティーは、活性層内の仮想の多角形の経路を周回するように光を反射することが可能な端面を備える。光検出器50で検出されたレーザ光Lの、RF帯域におけるスペクトルのピーク強度および/またはピーク周波数に基づいて回転角速度が求められる。
(もっと読む)
制御装置
【課題】簡易な構成により、ジンバル空間安定性能を向上させることができる制御装置を提供することを目的とする。
【解決手段】制御回路6は、カメラが搭載される構造物に設けられた角速度検出器が検出する角速度信号に基づいて、カメラの視軸を安定させるためのフィードバック制御を行うフィードバック回路と、当該の制御装置への通電が開始された後、カメラの視軸の方向を指示する角速度指令が前記フィードバック回路に入力され始めるまでの間において計測された角速度信号の値を補正値としてフィードバック回路へ入力される角速度信号から減算するドリフト補正器50と、角速度指令が0である期間が一定期間継続する間におけるジンバルの移動体に対する角度の変化を検出し、その角度に基づいた補正値をフィードバック回路へ入力される角速度信号から減算するドリフト補正器54とを有する。
(もっと読む)
慣性力センサ
【課題】検出感度を大きくした慣性力センサを提供することを目的としている。
【解決手段】加速度検出部と角速度検出部を有する検出素子1を備え、この検出素子1は、第1アーム8を第2アーム10に略直交方向に連結した2つの直交アームを有し、第1アーム8は、第1連結アーム11を第2連結アーム13に直交させたT字状の直交アームであって、この第1連結アーム11の一端が、支持部12にて支持されるとともに第2アーム10を介して錘部2に連結されており、第1連結アーム11の他端が直交する第2連結アーム13に連結されており、第2連結アーム13の両端部が枠体部4に連結され、第1アーム8および第2連結アーム13の厚みを第2アーム10や錘部2の厚みよりも非常に薄く形成し、かつ、第1アーム8と第2アーム10とは互いに直交方向に配置した構成である。
(もっと読む)
慣性力センサ
【課題】検出感度を大きくした慣性力センサを提供することを目的としている。
【解決手段】加速度検出部と角速度検出部を有する検出素子1を備え、この検出素子1は、第1アーム8を第2アーム10に略直交方向に連結した2つの直交アームを有し、2つの第1アーム8の一端が支持部12にて支持され、2つの第1アーム8の他端が枠体部4に連結され、第2アーム10の先端部に錘部2が固定され、枠体部4は固定アーム11にて固定部7と連結され、第1アーム8および固定アーム11の厚みを第2アーム10や錘部2の厚みよりも非常に薄く形成し、かつ、第1アーム8と固定アーム11とは互いに直交方向に配置した構成である。
(もっと読む)
水晶振動子の製造方法
【課題】ウエットエッチング加工で製作する振動ジャイロ用水晶振動子の振動脚の側面残渣は、角速度が発生していないときも振動脚に面外振動を生じる原因となるが、そのような面外振動を生じない水晶振動子の製造方法を提供する。
【解決手段】Zカット水晶板100をウエットエッチング加工する水晶振動子の製造方法において、水晶振動子を構成する水晶振動片の外形形状を決めるための耐食膜パターン101、102を−Z軸側の主表面のみに形成し、+Z軸側の主表面は全面を耐食膜103で被覆する。ある程度エッチングが進んだら、+Z軸側の耐食膜を除去した後、さらにウエットエッチング加工を行って振動脚の側面残渣の発生部分を除去する。
(もっと読む)
141 - 160 / 297
[ Back to top ]