
Fターム[2F105AA05]の内容
Fターム[2F105AA05]に分類される特許
1 - 20 / 81
ジャイロセンサーオフセット自動補正回路、ジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法
【課題】本発明は、ジャイロセンサーオフセット自動補正回路、ジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法に関する。
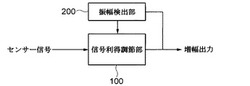
【解決手段】本発明の一実施例によると、各センサー電極の出力信号を受けて増幅し、可変抵抗調節によって各出力信号に含まれた駆動信号成分によるオフセットの少なくとも一部を除去する信号利得調節部と、信号利得調節部の出力信号を検出し、信号利得調節部の出力信号が予め設定された範囲内に維持するように可変抵抗を調節する振幅検出部と、を含んでなるジャイロセンサーオフセット自動補正回路が提案される。また、それを含むジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法が提案される。
(もっと読む)
慣性センサ

【課題】本発明は、慣性センサに関する。
【解決手段】本発明による慣性センサ100は、絶縁領域123と通電領域125とに区画された配線層120を含むメンブレン110と、メンブレン110の中央部分113の下部に備えられた質量体130と、メンブレン110を支持するようにメンブレン110の縁115の下部に備えられて質量体130を包むポスト140と、を含む構成を有しており、メンブレン110を安価のメタルコアで形成することにより、慣性センサ100の全体的な製造コストを低減するだけでなく、寄生容量を減少させることで慣性センサ100の感度を向上させることができる効果がある。また、メンブレン110から延長された質量体130を金属で形成することにより、質量体130の質量密度を高めることで慣性センサ100の感度を向上させることができる長所がある。
(もっと読む)
多層可動コームを使用するMEMSセンサ
【課題】多層可動コームを使用するMEMSセンサを提供すること。
【解決手段】MEMSセンサは、基板と、第1の複数のコームを有する少なくとも1つのプルーフマスとを含み、プルーフマスは、プルーフマスおよび第1の複数のコームが移動可能であるように1つまたは複数のサスペンションビームを介して基板に結合される。MEMSセンサは、第2の複数のコームを有する少なくとも1つの固定アンカをさらに含む。第1の複数のコームは、第2の複数のコームが交互に差し込まれている。第1の複数のコームおよび第2の複数のコームにおけるコームの各々は、1つまたは複数の非導電層によって互いに電気的に絶縁された複数の導電層を含む。周縁電界を遮断して、周縁電界に起因する感知軸に沿った第1の複数のコームの運動を低減するように、各導電層はそれぞれの電位に個々に結合される。
(もっと読む)
角速度センサ
【課題】従来に比して高感度且つ高精度であり、しかも、耐久性を向上させることができる角速度センサ素子を提供する。
【解決手段】本発明による角速度センサ装置1は、正多角形状の枠体6と、その枠体6に接続された複数のマス7a,7b,7c,7dとを有する駆動部を備えている。枠体6は、多角形の辺に相当する複数の駆動梁5a,5b,5c,5dから構成されており、角速度センサ装置1は、多角形の中心点に相当する中心基部2と、多角形の頂点とを結ぶ直線に相当する複数の検出梁3a,3b,3c,3dを含む検出部を更に有している。
(もっと読む)
MEMSセンサー及びその製造方法並びに電子機器
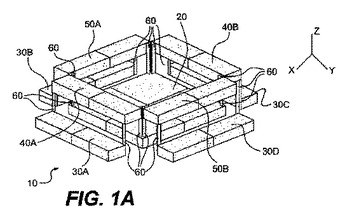
【課題】 占有面積の縮小、容量の増大、ブラウンノイズの低減及び可動部の質量の増大等の二律背反の要請をバランスよく満足して検出精度を向上することができるMEMSセンサー及びその製造方法並びに電子機器を提供すること。
【解決手段】 MEMSセンサー10は、固定部20と、弾性変形部30と、弾性変形部を介して固定部に連結され、周囲に空洞部が形成された可動錘部40と、固定部に第1の方向Aに沿って配列固定され、第1の方向と直交する第2の方向Bに沿って突出する複数の固定電極部50と、可動錘部より第2の方向に沿って突出形成されて、複数の固定電極部50にそれぞれ対向して配置され、第1の方向に沿って配列された複数の可動電極部60とを有する。可動錘部40は、複数の可動電極部と同一の層に形成され、複数の可動電極部を連結する連結部42と、複数の可動電極部及び連結部とは異なる層に形成され、連結部に接続された付加錘部46とを含む。
(もっと読む)
双音叉型振動片、振動型センサー素子および振動型センサー
【課題】引出電極の断線を防止することができ、高い信頼性を有する双音叉型振動片を提供する。
【解決手段】本発明に係る双音叉型振動片100では、引出電極112,122は、隣り合う領域のうちの、一方の領域の表面または裏面に形成された励振電極110,120から延出し、少なくとも二又に分岐して、分岐した一方の電極が他方の領域の一方の側面に形成された励振電極110,120と接続し、分岐した他方の電極が他方の領域の他方の側面に形成された励振電極110,120と接続し、引出電極112,122の励振電極110,120から延出している部分の幅の大きさは、領域の表面または裏面に形成された励振電極110,120の幅の大きさ以上である。
(もっと読む)
ジャイロスコープパッケージングアセンブリ
ディスク状共振器ジャイロスコープ(DRG)のようなプレーナ共振器ジャイロスコープのパッケージング方法が開示される。1つの実施形態では、パッケージングされた共振器ジャイロスコープは、支持材と、支持材に取り付けられた基板と、基板に接続されて基板とベースプレートとの間に空洞を画定するベースプレートと、ベースプレートに取り付けられ、かつ空洞内に吊り下げられている共振器とを備える。他の実施形態も記載される。  (もっと読む)
(もっと読む)
高速スピンレート条件下における慣性センサのバイアス誤差のリアルタイム補償方法
【課題】高速スピン条件下で飛行中の飛行体のためのバイアス誤差を高精度で推定する。
【解決手段】飛行体100の処理部130は、カナード152の展開前の時間1及び時間2それぞれにおいて、ジャイロスコープ112、X、Y及びZ方向の加速度計114から一連のデータを収集する。そして、2つの時点で収集したデータに基づき、Y方向加速度計の推定加速度計バイアスbYを、bY=(AY2ω12−AY1ω22)/(ω12−ω22)によって計算する。ω1及びω2は、ジャイロスコープから得られた時間1及び2でのロールレート、AY1及びAY2は、Y方向加速度計によって測定された時間1及び時間2での加速度である。Z方向加速度計についても同様に計算する。
(もっと読む)
面外サスペンション方式を使用するMEMS質量−バネ−ダンパシステム
面外(または、垂直)サスペンション方式を使用するMEMS質量-バネ-ダンパシステム(MEMSジャイロスコープおよび加速度計を含む)であって、サスペンションがプルーフマスに対して垂直であるMEMS質量-バネ-ダンパシステムが開示される。そのような面外サスペンション方式は、そのようなMEMS質量-バネ-ダンパシステムが慣性グレード性能を達成するのを助ける。MEMS質量-バネ-ダンパシステム(MEMSジャイロスコープおよび加速度計を含む)において面外サスペンションを製造する方法も開示される。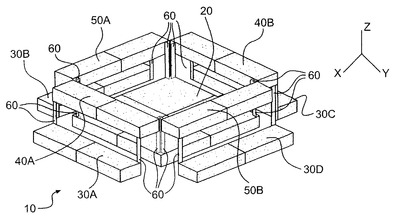
 (もっと読む)
(もっと読む)
慣性航法装置、飛翔体及び航法データ算出方法
【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
(もっと読む)
慣性センサー
【課題】バネ・錐振動系の振動を効率的に減衰させることができる慣性センサーを提供すること。
【解決手段】本発明にかかる慣性センサー100は、基部12、基部12に連続する弾性部14、および、弾性部14に連続し弾性部14によって支持され、慣性力によって変位可能な質量部16を有する基体10と、弾性部14の歪みを電界に変換する圧電変換構成20と、前記電界を熱に変換する電熱変換部30と、基部12と質量部16との間に発生した力に反応する変位検出部40と、を含む。
(もっと読む)
光ファイバコイル用ボビン
【課題】直交配置される3つの光ファイバコイルを一体化することができ、寸法精度および機械的強度に優れた光ファイバコイル用ボビンを提供する。
【解決手段】ボビン10は、立方体の中実ブロックからなり、その外表面11が、互いに直交する一対の第1平面部12,12と、一対の第2平面部13,13と、一対の第3平面部14,14と、から構成されている。外表面11には、光ファイバを巻回するための3つの巻線溝15,16,17が形成されている。3つの巻線溝15,16,17は、いずれも外表面11において開放され、第1平面部12、第2平面部13、および第3平面部14に対してそれぞれ平行に周回している。そして、3つの巻線溝15,16,17は、それぞれの中心を中実ブロックの中心点Cに一致させ、かつ、互いに半径が異なる円形を形成するように周回している。
(もっと読む)
環境的に堅牢なディスク状共振器ジャイロスコープ
開示されるマイクロ加工ディスク状共振器ジャイロスコープ(DRG)は、外部温度及び応力の影響をほとんど受けないように設計されている。DRGは、角速度を測定する振動型ジャイロスコープであり、外部温度及び機械的な応力に対する感度が低くなるように設計される。DRGは、集積された絶縁体を特徴とし、この集積された絶縁体は、電極ウェハと同じウェハ上に作製されて、複数の集積絶縁梁を形成する。更に、DRGは、ウェハレベル気密真空封止部、フリップチップボールグリッドアレイ(BGA)、及び垂直電気貫通接続部を含むことにより、信頼性を高め、製造コストを低減することができる。追加の支持層は、衝撃緩和部、垂直電気貫通接続部、及びフリップチップBGAと一緒に使用することができる。ゲッター及び衝撃緩和部を内蔵するパイレックスキャップまたは石英キャップを用いることができる。  (もっと読む)
(もっと読む)
物理量センサシステム、物理量センサ装置
【課題】物理量センサシステムの回路規模を削減する。
【解決手段】物理量センサシステム(11)は、物理量センサ(10)を駆動させ、センサ信号(Ssnc)から物理量信号(Dphy)を検波する。アナログ・デジタル変換回路(102m,102s)は、モニタ信号(Smnt)およびセンサ信号(Ssnc)をデジタルモニタ信号(Dmnt)およびデジタルセンサ信号(Dsnc)にそれぞれ変換する。駆動制御回路(103)は、デジタルモニタ信号(Dmnt)に応じてドライブ信号(Sdrv)を制御する。位相調整回路(104)は、デジタルモニタ信号(Dmnt)とデジタルセンサ信号(Dsnc)との位相差を調整する。検波回路(105)は、位相調整回路によって位相差が調整されたデジタルモニタ信号(Dmnt)およびデジタルセンサ信号(Dsnc)を乗算することにより、物理量信号(Dphy)を検波する。
(もっと読む)
駆動回路、物理量センサ装置
【課題】物理量センサの検出精度を安定させる。
【解決手段】振幅検出回路101は、物理量センサの自励振動に応じたモニタ信号Smntの振幅値D101を検出する。波形整形回路102は、モニタ信号Smntをパルス信号P102に変換する。パルス振幅変調回路104は、振幅値D101に応じてパルス信号P103の振幅を調整して、物理量センサの自励振動を制御するためのドライブ信号Sdrvとして出力する。
(もっと読む)
駆動回路、物理量センサ装置
【課題】物理量センサの検出精度を安定させる。
【解決手段】アナログ・デジタル変換回路101は、物理量センサからのモニタ信号Smntをデジタルモニタ信号Dmntに変換する。振幅検出回路102は、デジタルモニタ信号Dmntの振幅値の平均値D107を検出する。デジタル・アナログ変換回路103は、振幅検出回路102によって得られた平均値D107をアナログ平均値V103に変換する。可変利得増幅回路104は、デジタル・アナログ変換回路103によって得られたアナログ平均値V103に応じて増幅利得が可変であり、その増幅利得に従ってモニタ信号Smntを増幅または減衰させてドライブ信号Sdrvとして出力する。
(もっと読む)
物理量検出回路、物理量センサ装置
【課題】電源電圧の変動や温度変化に起因するノイズ補正精度の劣化を抑制できる物理量検出回路を提供する。
【解決手段】アナログ・デジタル変換回路101は、物理量センサからのモニタ信号Smntおよびセンサ信号Ssncをそれぞれデジタルモニタ信号Dmntおよびデジタルセンサ信号Dsncに変換する。補正回路102は、デジタルモニタ信号Dmntの振幅および位相を調整してデジタルセンサ信号Dsncのノイズを減衰させるためのデジタル補正信号Dcorを生成するとともに、デジタル補正信号Dcorを用いてデジタルセンサ信号Dsncを補正してデジタルセンサ信号DDDを出力する。検波回路103は、デジタルセンサ信号DDDから物理量センサに与えられた物理量に対応する物理量信号Dphyを検波する。
(もっと読む)
光ファイバジャイロスコープのための2本巻き光ファイバ収容
【課題】ローレンツの相反性及びジャイロスコープの性能の低下を防ぐ光ファイバジャイロスコープを提供する。
【解決手段】光ファイバジャイロスコープを構成する方法は、第1の光ファイバ210及び第2の光ファイバ220を外面を有する干渉計200の光路に光学的に結合すること、第1の光ファイバ210及び第2の光ファイバ220の少なくとも一部を外面に結合すること、並びに第1の光ファイバ210及び第2の光ファイバ220を集積光学チップ(IOC)の光路に光学的に結合することを含む。
(もっと読む)
角速度センサ素子
【課題】検出感度及び機械的強度に優れた角速度センサ素子を提供する。
【解決手段】角速度センサ素子(1,20,30)は、相対的な位置関係を保持しつつ、直交3軸(X軸、Y軸、Z軸)のうち少なくとも1軸の周りに回転自在に構成された第一の固定部(2)及び第二の固定部(3)と、第一の連結腕(4A)と、第二の連結腕(5A)とを備える。第一の連結腕(4A)は、所定の振動モードで振動する振動する第一の自由端と、第一の固定部(2)に固定される第一の固定端とを有する。第二の連結腕(5A)は、所定の振動モードで振動する振動する第二の自由端と、第二の固定部(3)に固定される第二の固定端とを有する。第一の自由端は、錘(6A)を介して第二の自由端に接続されている。
(もっと読む)
自己較正型ジャイロスコープ・システム
【課題】ジャイロスコープ・システムにおいて、倍率誤差及びバイアス誤差を最少に抑える。
【解決手段】相互に非平行配列の検知軸130a〜130dを有する複数のジャイロスコープ110a〜110dを用いる。ジャイロスコープの数は、ナビゲーションに必要な軸の数よりも少なくとも1つ多い。プロセッサが、モード逆転技法を用いて、選択したジャイロスコープについてのバイアス誤差の推定値を得、ランダム閉ループ倍率技法を用いて、選択したジャイロスコープについて倍率誤差の推定値を得る。モード逆転技法では、各ジャイロスコープは較正のために一時的にオフラインとし、その後通常動作に戻す。少なくとも1つの冗長なジャイロスコープが設けられているので、選択したジャイロスコープがオフラインになっているとき、残りの動作中のジャイロスコープからの速度情報を用いれば、オフラインのジャイロスコープの軸を中心とする基準速度を導き出すことができる。
(もっと読む)
1 - 20 / 81
[ Back to top ]