
Fターム[2F112AD01]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | 光波の伝搬時間を測定するもの (546)
Fターム[2F112AD01]に分類される特許
141 - 160 / 546
光波距離測定装置

【課題】測定対象物の画像データと画素毎の距離データが得られる様にした光波距離測定装置を提供する。
【解決手段】測距光を変調して測定対象物に照射する投光部1と、測定対象物からの反射測距光を受光する受光部6と、受光信号を記憶する信号処理部7と、前記受光部及び前記信号処理部を制御して受光信号を取得する信号処理制御9と、受光信号に基づき測定対象物迄の距離を演算する演算処理器8とを有し、前記受光部は、所定の配列で配置された複数の画素11と、各画素からの受光信号を蓄積し、1周期を所定数分割した内の1分割分の受光量を検出し、検出結果を時系列に出力する出力部15とを有し、前記信号処理制御部は、一周波毎に受光量を検出する分割部分の位置を順次変更し、前記演算処理器は、少なくとも1周期分の検出結果に基づき一周波分の波形を演算すると共に、照射した前記測距光に対する前記波形の位相差を求め、該位相差より距離を演算する。
(もっと読む)
液晶表示装置および測距光学装置

【課題】 ビームスプリッタを備えた測距装置等において、安価で表現の自由度が高い液晶パネルを使用して、高輝度・高コントラストの表示が可能な表示装置を提供する。
【解決手段】 対物レンズと接眼レンズとの間の光路上に介装したビームスプリッタ3を介して、対物レンズからの観察像に、表示装置からの表示画像を合成する装置において、前記表示装置として、LEDをバックライト17aとして備える垂直配向型の液晶パネル17bを設け、かつ前記液晶パネルは、前記接眼レンズ(12)に向けた表示画像の光路L1に対して所定角度だけ傾斜して設ける。
(もっと読む)
物体検知装置
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、変調光をスリット光として対象空間に投光するスリット光形成部3bと、変調光をスポット光として対象空間に投光するスポット光形成部3cとを備えた投光光学系3が配置される。
(もっと読む)
距離画像処理システム
【課題】 距離画像センサの設置位置を変更した場合でも、容易に背景画像を生成することができるとともに、環境温度や経年変化が生じた場合でも、常に正確な距離測定を行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて背景画像を生成するとともに、この背景画像の距離値の差分から距離画像を生成する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、距離画像センサ1により取得された各画素の距離値が最大となる距離値を保存しておき、各画素の最大の距離値に基づいて背景画像を生成するように構成されている。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
3次元撮像装置
【課題】一つの撮像装置で距離情報と色情報の導出を実現できて立体カラー撮像画像を得る。
【解決手段】3次元撮像装置1は、光源手段2からの投射光L1として近赤外光が被計測物Aに照射され、この投射光L1の被計測物Aからの反射光L2を受光手段3で受光し、受光手段3の受光情報に基づいて被計測物Aまでの距離情報を信号処理部4により導出する距離情報導出手段52と、自然光または照明光による被計測物Aからの反射光L2を受光手段3で受光して、この受光手段3の受光情報に基づいて被計測物AのR(赤),G(緑)およびB(青)の色情報を信号処理手段4により導出する色情報導出手段53とを有して3次元画像を撮像する。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】撮影対象空間内の対象物に応じて、効率よく高い品質の距離画像を得る。
【解決手段】光電変換素子で受光した受光量に応じた電荷量から各画素の強度値を算出し、強度が所定以下の画素についてのみ補正を行う。補正は、同一画素の電荷量を時間方向に過去に遡り加算することにより行う。加算は、加算後の電荷量から算出した強度値が所定以上となるまで行う。そして、補正後の電荷量から、距離値を算出し、距離画像を生成する。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】開口率の向上を図ることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサRS1は、一次元状に配置された複数のユニットからなる撮像領域を半導体基板1上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る。1つのユニットは、光感応領域と、空間的に離間して配置され、光感応領域からの信号電荷を収集する第3半導体領域9a,9bと、第3半導体領域9a,9bのそれぞれに設けられ、異なる位相の電荷転送信号が与えられる第1及び第2転送電極TX1,TX2と、空間的に離間して配置され、光感応領域からの不要電荷を収集する複数の第4半導体領域11と、第4半導体領域11のそれぞれの周囲に該第4半導体領域11を囲んで設けられ、光感応領域から第4半導体領域11への不要電荷の流れの遮断及び開放を選択的に行う第3転送電極TX3と、を備える。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 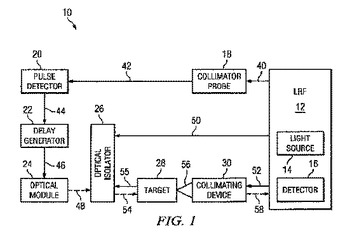 (もっと読む)
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BK及び光入射面1BKとは逆側の表面1FTを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備える。フォトゲート電極PGは、表面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から光入射面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
距離センサ及び距離画像センサ
【課題】開口率の向上を図ることができ、S/N比の良い距離画像を得ることができる距離画像センサを提供する。
【解決手段】距離画像センサRSは、1次元状に配置された複数のユニットからなる撮像領域を半導体基板1上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る。1つのユニットは、光感応領域と、第1及び第2長辺L1,L2の対向方向でフォトゲート電極PGを挟んで対向する二対の第3半導体領域9a,9bと、第3半導体領域9a,9bとフォトゲート電極PGとの間に設けられる第1及び第2転送電極TX1,TX2と、第1及び第2長辺L1,L2の対向方向でフォトゲート電極PGを挟んで対向し且つ第3半導体領域9a,9bの間に配置される第4半導体領域11a,11bと、第4半導体領域11a,11bとフォトゲート電極PGとの間に設けられる第3転送電極TX3とを備える。
(もっと読む)
距離センサ及び距離画像センサ
【課題】フォトゲート電極の直下の領域に発生した電荷を各半導体領域に適切に振り分けることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】フォトゲート電極PGは、対向する第1及び第2辺を有する。第1及び第2半導体領域FD1,FD2は、フォトゲート電極PGの第1辺側において当該第1辺に沿って互いに空間的に離間して配置されている。第3及び第4半導体領域FD3,FD4は、フォトゲート電極PGの第2辺側において当該第2辺に沿って互いに空間的に離間して配置されている。第1ゲート電極TX1は、フォトゲート電極PGと第1及び第3半導体領域FD1,FD3との間に設けられている。第2ゲート電極TX2は、フォトゲート電極PGと第2及び第4半導体領域FD2,FD4との間に設けられている。第1〜第4半導体領域FD1〜FD4は、P型のウェル領域W1〜W4と重複し且つ囲まれるようにそれぞれ形成されている。
(もっと読む)
光測距装置
【課題】レーザ安全の基準を満たす様に光測距装置を最適に制御する。
【解決手段】光測距装置は、光反射面を有する可動部が揺動することで光反射面に入射される光を光走査できる光走査部と、可動部を揺動させる駆動信号を、可動部が有する共振周波数に合わせて設定された駆動周波数で、光走査部に供給し可動部を揺動駆動する走査駆動部と、光反射面に向かってレーザ光を投光する光源部と、光反射面で反射走査されたレーザ光が物体により反射された反射光を受光する受光部と、レーザ光の各照射位置間の距離が所定値以上になる様に設定された、レーザ光の投光タイミングを光源部に指令する光源制御部と、レーザ光の投光及び受光タイミングに基づいて物体の距離を計測する測距部と、設定されている駆動周波数と投光タイミングとを共振周波数に合わせて変更する変更手段と、を備える。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、レーザスキャナ(10)の環境内で物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、多数の測定点(X)について、物体(O)までの距離を求める制御評価ユニット(22)とを含む装置において、回転鏡(16)は、ハイブリッド構造として構成されたロータ(61)の一部である。 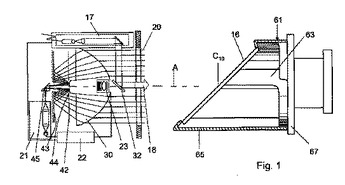 (もっと読む)
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、多数の測定点(X)について、前記物体(O)までの距離を求める制御評価ユニット(22)とを備える装置において、受光レンズ(30)によって屈折された受光光線(20)を受光レンズ(30)の方へ反射する後部鏡(43)が、光軸(A)上の受光レンズ(30)の後方に設けられる。  (もっと読む)
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
距離測定装置
【課題】レーザー光の必要な光量を確保した上で安全性の向上を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を反射する受光用ミラーと、受光用ミラーで反射されたレーザー光を受光する受光素子と、受光用ミラーで反射されたレーザー光を受光素子に集光して導く集光光学系と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、レーザー光源と被測定物の間の光路上に光路範囲における外周部のレーザー光を遮蔽する遮蔽部材9を設けた。
(もっと読む)
141 - 160 / 546
[ Back to top ]