
Fターム[2F112AD01]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | 光波の伝搬時間を測定するもの (546)
Fターム[2F112AD01]に分類される特許
161 - 180 / 546
自律移動装置及びその制御方法

【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
距離測定装置

【課題】レーザー光の必要な光量を確保した上で安全性の向上を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を反射する受光用ミラーと、受光用ミラーで反射されたレーザー光を受光する受光素子と、受光用ミラーで反射されたレーザー光を受光素子に集光して導く集光光学系と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、レーザー光源と被測定物の間の光路上に光路範囲における外周部のレーザー光を遮蔽する遮蔽部材9を設けた。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12に形成された1つの埋め込みフォトダイオードBPDと、半導体基体12上に絶縁体を介して形成された電極16を有する複数のMOSダイオード18とを有する。埋め込みフォトダイオードBPDは、上面から見たとき、1つの部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、MOSダイオード18の各電極16は、上面から見たとき、埋め込みフォトダイオードBPDにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12上に絶縁体を介して形成された第1電極16aを有する1つの第1MOSダイオード18aと、半導体基体12上に絶縁体を介して形成された第2電極16bを有する複数の第2MOSダイオード18bとを有する。第1MOSダイオード18aの第1電極16aは、上面から見たとき、1つの電極部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、第2MOSダイオード18bの各第2電極16bは、上面から見たとき、第1電極16aとは分離され、且つ、第1電極16aにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
測距装置、測距方法、及びそのプログラム
【課題】被写体の測距の高精度化を図ることができる測距装置、測距方法、及びそのプログラムを提供する。
【解決手段】測距装置は、光を発光する光源と、前記光源により発光されて、被写体で反射された反射光を撮像する撮像部と、前記撮像部が撮像することにより得られた画素の画素値を、被写体までの距離を示す距離情報に変換する距離情報変換部と、前記距離情報に基づいて第1の撮像条件を設定する撮像条件設定部と、前記光源及び前記撮像部を制御して、前記第1の撮像条件で前記被写体を撮像させる撮像制御部と、を備える。
(もっと読む)
光電スキャナ
【課題】空間領域の走査において従来より大きな角度領域を捕らえられるスキャナの提供。
【解決手段】光線16を出射するための発光器12、第1の部分期間には前方の監視領域26を、また第2の部分期間にはスキャナ10の後方領域を交互に塗りつぶすように第1の偏向方向に光線を周期的に偏向させるための第1の偏向ユニット18、20、監視領域から拡散反射又は直反射された光線32から受光信号を発生させるための受光器38、及び受光信号に基づいて監視領域内の物体30を認識するように構成された評価ユニット40を備える光電スキャナを提供する。このスキャナには、光線を第2の偏向ユニット44へ向けて方向転換させるために後方領域に方向転換ユニット42が設けられ第2の偏向ユニットが光線を第1の偏向方向に対して横方向に延伸する第2の偏向方向に周期的に偏向させるように構成されている。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 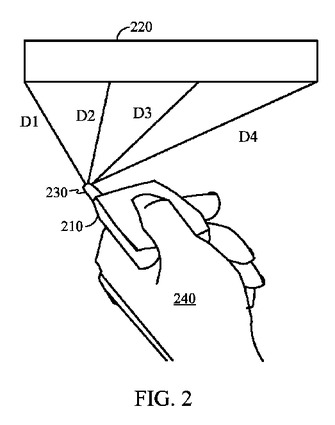 (もっと読む)
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
光測距装置
【課題】要求に応じて動作状態を変更することのできる光測距装置を提供する。
【解決手段】光測距装置1は、光反射面を有する可動部が揺動することで光反射面に入射される光を対象領域内でリサージュ走査できる光走査部5、可動部を第1方向、第2方向に揺動させる第1駆動信号、第2駆動信号を光走査部5に供給して可動部を揺動駆動する駆動部7、光反射面に向かってパルス光を出射する光源部9、パルス光の反射光を受光する受光部11及びパルス光の出射タイミングと反射光の受光タイミングとに基づいてパルス光を反射した物体までの距離を計測する測距部13を備える。駆動部7は、第1駆動信号と第2駆動信号との位相差を変更する位相差変更部72、及び、第1駆動信号及び第2駆動信号を大きさ調整して可動部の揺動振幅を変更する振幅変更部73の少なくとも一方を含む。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、安定したビームプロファイルにて、ビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源410は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源410の発光部の鉛直方向に平行な方向の長さによって、目標領域におけるレーザ光の鉛直方向の長さが設定される。また、レーザ光に対する収束レンズ430の波面収差が0.15λrms以下に設定されている。
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
距離画像処理システム
【課題】 距離画像センサの位置調整を容易に行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて生成された距離画像から特徴部を抽出する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、調整しようとする距離画像センサ1から入力される距離値に基づいて生成された距離画像から調整対象となる特徴部を抽出し、この調整対象となる特徴部と、あらかじめ抽出された基準となる特徴部とを比較し、その位置の誤差を演算するように構成されている。
(もっと読む)
目標物体を検出するためのドア感知システム
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
161 - 180 / 546
[ Back to top ]