
Fターム[2F112BA06]の内容
Fターム[2F112BA06]に分類される特許
101 - 120 / 480
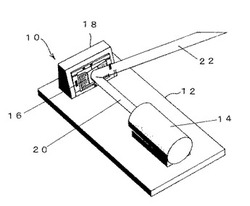
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
センサー系及びその動作方法

【課題】受光面積、受光量、感度、光電荷の伝送効率、正確度を向上し、チップ上の占有面積を低減できるセンサー系を提供する。
【解決手段】本センサー系は、半導体基板上に形成され、それぞれが、第1フォトゲートと第2フォトゲートとを含む複数のフォトゲート対と、半導体基板内に形成された第1共有フローティングディフュージョン領域と、半導体基板上に形成された複数の第1伝送トランジスタと、を含む。複数の第1伝送トランジスタのそれぞれは、第1制御信号に応答して、複数のフォトゲート対のそれぞれの第1フォトゲート下に形成された複数の電荷を第1共有フローティングディフュージョン領域に伝送する。
(もっと読む)
距離画像取得装置
【課題】新たな構成の付加なく、温度変化の影響を受けず高精度距離検出が可能となるよう、基線長変動量を検知する。
【解決手段】被写体に対向するレンズがアレイ配列されステレオレンズペア1',1''を構成するレンズアレイ1と、レンズアレイの像面側に複数のレンズにより結像される被写体の縮小像(個眼像)集合の複眼像を撮像する撮像手段4と、ステレオレンズペアによる個眼像ペアから距離画像を算出する距離画像演算器20と、撮像手段と略平行な平面内、かつステレオレンズペアの配列方向に略垂直の任意一断面において、レンズアレイと接触しレンズアレイを保持する保持部材6と、1つの個眼像ペアの視野を制限する視野制限手段と、視野が制限された個眼像ペアから算出した輝度値と、視野が制限されない個眼像から算出した輝度値との比に基づき、ステレオレンズペアの基線長変動量を検知し、距離画像演算器の距離出力値を補正する演算器を備える。
(もっと読む)
測距装置及び測距方法
【課題】測定対象物までの距離の測定精度を向上させる。
【解決手段】LDモジュール11,12は、原点から所定の位置の平面S1上において、z軸を中心とする対称位置に2つの投光スポットP2,P1が形成されるように、光を投光する。カメラ13は、z軸方向に配置された測定対象物上に、LDモジュール11,12が投光することにより形成された2つの投光スポットを受光する。距離取得部14は、原点から4mの位置における投光スポットP1,P2の位置関係と、カメラ13が受光することによって得られた測定対象部上の2つの投光スポットの位置関係を比較し、比較結果に基づいて、原点から測定対象物までの距離を取得する。
(もっと読む)
光学式測距センサおよび電子機器
【課題】小型,高性能,低消費電力,高速応答および安価な光学式測距センサを提供する。
【解決手段】発光素子12と受光素子13を同一リードフレーム11に搭載して、透光性樹脂14a,14bと遮光性樹脂15で一体成形することにより、受光素子13を発光素子12と同一平面に形成し、発光素子12と受光素子13を同一パッケージに形成し、位置検出受光部,処理回路部および駆動回路部が搭載された受光素子13を1チップで形成する。こうして、光学式測距センサのサイズを小さくして製造コストを低減する。さらに、上記位置検出受光部の有効受光部のサイズを、光スポットの設計上のサイズ以下に設定する。こうして、受光素子13のチップを小さくして製造コストの更なる低減を図る。さらに、上記位置検出受光部の無効受光部と無効受光部からの不要な信号とを無くして、応答時間を短縮し、消費電力を低減し、信号処理時のS/Nを大きくし、性能の向上を図る。
(もっと読む)
撮像装置
【課題】撮像素子により撮像された遮光壁の輝度情報に基づいて、各レンズの位置を計算することで温度変化による影響を取り除いて、環境変動に強い撮像装置を提供する。
【解決手段】この撮像装置50は、被写体(図示せず)に対向する位置に配設され、複数のレンズ1a、1bをアレイ状に配列したレンズアレイ1と、レンズアレイ1の像面側に設けられ、複数のレンズにより結像された被写体の縮小像(以下、個眼像と呼ぶ)の集合である複眼像を撮像するCMOSセンサ(撮像素子)4と、CMOSセンサ4により撮像された複眼像を処理する演算器10と、レンズアレイ1を構成する隣接する各レンズ間での光線のクロストークを防止する遮光壁2と、を備えて構成されている。
(もっと読む)
距離画像処理システム
【課題】 距離画像センサの設置位置を変更した場合でも、容易に背景画像を生成することができるとともに、環境温度や経年変化が生じた場合でも、常に正確な距離測定を行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて背景画像を生成するとともに、この背景画像の距離値の差分から距離画像を生成する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、距離画像センサ1により取得された各画素の距離値が最大となる距離値を保存しておき、各画素の最大の距離値に基づいて背景画像を生成するように構成されている。
(もっと読む)
3次元撮像装置
【課題】一つの撮像装置で距離情報と色情報の導出を実現できて立体カラー撮像画像を得る。
【解決手段】3次元撮像装置1は、光源手段2からの投射光L1として近赤外光が被計測物Aに照射され、この投射光L1の被計測物Aからの反射光L2を受光手段3で受光し、受光手段3の受光情報に基づいて被計測物Aまでの距離情報を信号処理部4により導出する距離情報導出手段52と、自然光または照明光による被計測物Aからの反射光L2を受光手段3で受光して、この受光手段3の受光情報に基づいて被計測物AのR(赤),G(緑)およびB(青)の色情報を信号処理手段4により導出する色情報導出手段53とを有して3次元画像を撮像する。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 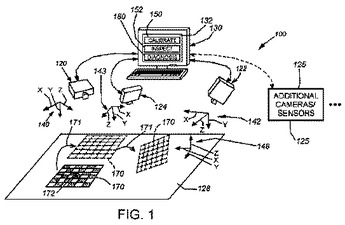 (もっと読む)
(もっと読む)
ステレオカメラ
【課題】カメラ部をステーに取り付ける際に、カメラ部と部材の取り付け面の加工精度や組み立て精度によって再びずれが生じてしまうという問題があった。
【解決手段】一方端に第1の撮像素子、他方端に第2の撮像素子を有するステーと、第1の撮像素子が接続される第1の撮像素子用基板と、第2の撮像素子が接続される第2の撮像素子用基板と、第1の撮像素子が設置される第1の設置面と、第2の撮像素子が設置される第2の設置面と、第1の撮像素子との組み合わせにより撮像系を構成する第1のレンズと、第2の撮像素子との組み合わせにより撮像系を構成する第2のレンズと、を有し、第1の基板上に、第1の設置面、第1の撮像素子、第1のレンズの順に配置され、第2の基板上に、第2の設置面、第2の撮像素子、第2のレンズの順に配置され、第1の設置面と第2の設置面とが、実質的に同一の平面又は実質的に平行な平面に含まれるステレオカメラ。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】撮影対象空間内の対象物に応じて、効率よく高い品質の距離画像を得る。
【解決手段】光電変換素子で受光した受光量に応じた電荷量から各画素の強度値を算出し、強度が所定以下の画素についてのみ補正を行う。補正は、同一画素の電荷量を時間方向に過去に遡り加算することにより行う。加算は、加算後の電荷量から算出した強度値が所定以上となるまで行う。そして、補正後の電荷量から、距離値を算出し、距離画像を生成する。
(もっと読む)
光学式測距装置および電子機器および光学式測距装置の校正方法
【課題】パッシブ測距方式を用いずに、窓材からの反射による誤測距または誤検知を防止できる小型の光学式測距装置を提供する。
【解決手段】受光素子12は、発光素子から出射されて測距対象物16により反射された第1の光束17と発光素子11から出射されて窓材15により反射された第2の光束18とを受光レンズ14を介して受光して、第1,第2の光束17,18の受光素子12上における光強度分布を検出する。光強度分布抽出部により、受光素子12により検出された第1,第2の光束17,18が照射された受光素子12上における光強度分布から、第2の光束18の受光素子12上における光強度分布を減算して、第1の光束17の受光素子12上における光強度分布を抽出する。光強度分布抽出部により抽出された第1の光束17の受光素子12上における光強度分布に基づいて、測距対象物16までの距離を距離演算部により演算する。
(もっと読む)
距離画像入力装置と車外監視装置
【課題】画角が等しく、それぞれ異なる距離に焦点があった複数のステレオ画像ペアを取得して距離精度と位置精度が高い距離画像を検出する。
【解決手段】撮像装置2で被写体を撮像して、それぞれ異なる距離に焦点があった複数のステレオ画像を出力する。演算処理ユニット3の視差検出部13は撮像装置2から出力する各ステレオ画像の焦点が合う距離の範囲に基づいて視差を計算して視差情報を有する複数の視差画像を出力し、この複数の視差画像を視差合成部14で合成して合成視差画像を出力する。距離算出部15は視差合成部14から出力する合成視差画像から被写体までの距離を算出して距離画像を出力する。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
視認状況測定装置
【課題】ブルーミング等の影響を受け難くし、視認状況を示す測定結果をより高い精度で得る。
【解決手段】指標ユニット2は、発光可能な第1の領域と、該第1の領域から位置のずれた非発光の第2の領域と、前記第1の領域が発する光とは別の光幕取得用光を外部に照射し得る照射部と、を有する。カメラ1は、前記第1及び第2の領域を撮像する。処理装置3は、前記第1の領域の発光時に得られた画像に基づく前記第1の領域の輝度情報と、前記第1の領域の非発光時に得られた画像に基づく前記第1の領域の輝度情報と、光幕取得用光の照射時に得られた画像に基づく前記第2の領域の輝度情報と、光幕取得用光の非照射時に得られた画像に基づく前記第2の領域の輝度情報とに基づいて、視認状況を示す測定結果を得る。前記照射部は、光幕取得用光の直接光が前記撮像手段の視野内に到達しないように、光幕取得用光を照射する。
(もっと読む)
距離画像取得装置及び距離画像取得処理方法
【課題】超短基線長のステレオカメラにおいて、距離測定精度の向上を図る。
【解決手段】略同一の複数のステレオ撮像系を用いて撮像される画像よりなる複数のステレオ画像ペアを抽出する画像キャプチャ手段と、複数のステレオ画像ペアから複数の視差画像を検出する視差検出手段と、複数の視差画像の各視差を、ステレオ撮像系の基線長に基づいて正規化し、正規化された視差(正規化視差)により、複数の視差画像の各視差の視差類似評価を行う視差評価手段と、複数の視差画像の、視差類似評価結果の正規化視差を用いて被写体までの距離を算出して、一つの距離画像を検出する距離検出手段を備える。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12に形成された1つの埋め込みフォトダイオードBPDと、半導体基体12上に絶縁体を介して形成された電極16を有する複数のMOSダイオード18とを有する。埋め込みフォトダイオードBPDは、上面から見たとき、1つの部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、MOSダイオード18の各電極16は、上面から見たとき、埋め込みフォトダイオードBPDにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
変位センサ
【課題】高速、且つ高精度に受光中心位置を検出可能な変位センサを提供する。
【解決手段】変位センサ10は、受光信号を順次読み込み、受光信号を時間で二次微分して二次微分信号を生成し、その二次微分信号が正値から負値に変化するゼロクロス点における画素の受光信号レベルをしきい値に設定し、そのしきい値以上の画素範囲を演算範囲に設定する制御部16を備える。この制御部16は、上記設定した演算範囲にて重心演算を行って受光波形の重心位置を算出し、その重心位置を受光中心位置として検出する。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 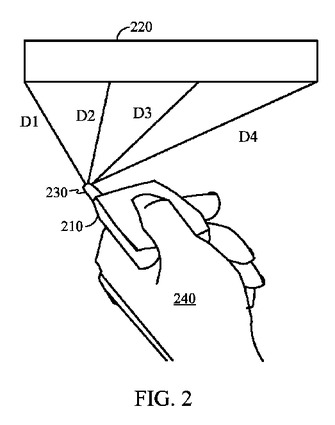 (もっと読む)
(もっと読む)
101 - 120 / 480
[ Back to top ]