
Fターム[2F112BA06]の内容
Fターム[2F112BA06]に分類される特許
161 - 180 / 480
混雑検知装置

【課題】混雑度をより正確に把握することが可能な混雑検知装置を提供する。
【解決手段】エスカレータ10の乗降口等に、手すり12や床面14を含まない範囲で監視空間16を設定し、上方に設置された2台のカメラ18,20で撮影された画像から、監視空間16内の人物集団の三次元形状および/または人物集団の動きを表わす複数のベクトルを決定し、それに基いて体積占有率および/または三次元フローを算出して混雑度を判定する。
(もっと読む)
撮像装置及び半導体回路素子

【課題】高速で高精度な視差演算を可能とする撮像装置を提供する。
【解決手段】複数のレンズ部と、それらのレンズ部に一対一に対応して設けられ、光軸方向に対して略垂直な受光面有する複数の撮像領域と、生成された撮像信号の入力を受ける撮像信号入力部133と、撮像信号入力部133へ転送される撮像信号の転送範囲を決定する転送範囲決定部144と、転送範囲決定部144により決定された転送範囲に応じた撮像信号を撮像信号入力部133へ転送するように前記撮像領域を駆動する撮像領域駆動部132と、撮像信号入力部133に転送された撮像信号に基づき視差を演算する視差演算部142とを備えており、転送範囲決定部144は、前記複数の撮像領域のうち少なくとも2つの撮像領域で生成される撮像信号を転送範囲と決定する第1の動作モードと、第1の動作モードとは異なる撮像信号を転送範囲と決定する第2の動作モードとを切り替える。
(もっと読む)
光センサ
【課題】本来の検知対象を後方の鉢や扉その他のものから正確に判別することができ、精度高く検知対象を検知することのできる光センサを提供する。
【解決手段】発光部36から検知対象に向けて発した光の検知対象からの反射光を受光部42で受光し、発光部36と受光部42の並びの方向をX方向として、反射光の検知対象からの反射角度に応じて変化する受光素子38上のX方向の受光位置を検出することによって検知対象の位置の検知を行う光センサ20において、発光素子32の発光方向の前方に、発光素子32からの光をX方向に絞り、X方向への光の拡がりを制限するスリット孔68を配置し、スリット孔68を透過した光を前方に配置した集光レンズ34を通して平行光として前方に照射するようになす。
(もっと読む)
撮影システム及びレンズ装置
【課題】複数の被写体から主被写体を自動的に選択し、距離や速度等の被写体情報を表示する。
【解決手段】撮影システムは、撮影範囲内に設けられた複数の測距エリア1〜16のそれぞれにおいて被写体距離を算出する距離算出手段114と、複数の測距エリアのそれぞれにおいて被写体速度を算出する速度算出手段116と、被写体距離、該被写体距離間の差、被写体速度、及び該被写体速度間の差のうち少なくとも1つを表す被写体情報を生成する情報生成手段114,116と、複数の測距エリアのうち、速度算出手段により算出された被写体速度が第1の範囲SA内である測距エリアを抽出する抽出手段117と、カメラにより生成された撮影映像と抽出手段により抽出された測距エリアに対応する被写体情報とを含む出力映像を生成する出力映像生成手段203とを有する。
(もっと読む)
車両周辺監視装置
【課題】車両に搭載された2台の撮像手段により撮像された同一の対象物の画像部分の視差に基づいて、対象物と車両との距離を算出するときの誤差を低減することができる車両周辺監視装置を提供する。
【解決手段】所定時点で前記第1の撮像手段により撮像された第1画像から、実空間上の対象物の第1画像部分を抽出し、該所定時点で前記第2の撮像手段により撮像された第2画像から、該第1画像部分と相関性を有する第2画像部分を抽出して、該第1画像部分と該第2画像部分との視差を算出する視差算出手段22と、実空間上の同一の対象物について、視差算出手段22により時系列的に視差を算出して、視差勾配を算出する視差勾配算出手段23と、車両の速度を検出する速度センサ4と、視差勾配と車両の速度とに基づいて、車両から対象物までの距離を算出する第1の距離算出手段24とを備える。
(もっと読む)
測距システム及び測距方法
【課題】測定精度を向上することが可能な測距システム及び測距方法を提供する。
【解決手段】環境光Lsのみが入射する期間P1、P2において第1スイッチング素子60a、60bのゲートG11、G12を開いて電荷量Q1、Q2を求める。環境光Ls及び反射光Lrが入射する期間P3、P4(それぞれ期間P1、P2と同じ長さである。)において第1スイッチング素子60c、60dのゲートG13、G14を開いて電荷量Q3、Q4を求める。差Q4−Q2と差Q3−Q1との比と、往復期間ΔP(パルス光Lpが測距システム10と対象物Wの間を往復する期間)と期間P3との比が等しいことを利用して往復期間ΔPを演算する。往復期間ΔPと光速cに基づき、測距システム10と対象物Wとの距離Dを求める。
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
レーザ加工機
【課題】被加工対象物の表面を簡便に且つ迅速に加工可能なレーザ加工機を提供する。
【解決手段】ガルバノスキャナで走査したレーザ光を、テレセントリック型fθレンズで被加工対象物に照射して表面を加工する。ガルバノスキャナの上流側からレーザ光の光軸に沿って光を入射し、被加工対象物の表面で反射してレーザ光の光軸に沿って戻ってきた光を受光することによって、表面までの距離を検出する。こうすれば、ガルバノスキャナの上流側から被加工対象物の表面までの間では、レーザ光の光軸と、距離検出用の光軸とが一致するので、常に正確に、レーザ光の照射位置までの距離を検出できる。その結果、面倒な光軸調整が不要となり、加えて、ガルバノスキャナでレーザ光を走査することで、迅速な加工が可能となる。
(もっと読む)
光飛行時間型距離画像センサの制御方法およびそのシステム
【課題】明るい背景光の受光による固体撮像素子の電荷蓄積部の飽和を防止することができるとともに、取得される距離画像の距離精度に悪影響が及ばないようにする。
【解決手段】光電変換素子と、光電変換素子ごとに設けられて電荷を蓄積可能な複数の電荷蓄積部と、変調光に同期して電荷を複数の電荷蓄積部に振り分けて蓄積させる振り分け手段と、複数の電荷蓄積部とそれぞれ導通可能な複数の容量と、複数の電荷蓄積部と複数の容量との導通状態を制御する制御手段とを有する固体撮像素子により、画素を構成した光飛行時間型距離画像センサの制御方法であって、振り分け手段により複数の電荷蓄積部に電荷を振り分ける光蓄積時間において、住意の時間配分で制御手段により制御される導通状態を切り替えることにより、変調光による電荷を複数の電荷蓄積部に蓄積させたまま、変調光以外の光による電荷を複数の電荷蓄積部から除去する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】正確に奥行値を設定することができるようにする。
【解決手段】焦点情報抽出部31は、入力画像の画素毎に、注目画素に対応する周辺画素の輝度信号より高周波成分を焦点情報として抽出する。領域統合部32は、注目画素毎に、注目画素の焦点情報を、その周辺の画素の焦点情報に合わせる様に統合焦点情報を生成する。暗部処理部33は、注目画素の焦点情報を、注目画素周辺の焦点情報よりも大きな値の平均値に置き換えて暗部焦点情報を生成する。照明成分抽出部35は、入力画像の注目画素毎の輝度信号を周辺画素の輝度信号に合わせるようにすることにより照明成分を抽出する。奥行生成部34は、統合焦点情報と暗部焦点情報とを、照明成分に基づく係数により積和演算して各画素単位の奥行値を求め、正規化し、正規化した奥行値をトーンカーブにより制御する。本発明は、画像処理装置に適用することができる。
(もっと読む)
投光ユニット、および物体検出装置
【課題】長さ方向における光強度分布のばらつきを抑えた線状の光を投光することができる投光ユニットを提供する。
【解決手段】LD11が出射したレーザ光は、ライトガイド12に入射され、ライトガイド12内で屈折を繰り返し、出射面に伝搬する。ライトガイド12の出射面から出射されるレーザ光の形状は、横幅w×縦幅hの矩形形状である。また、ライトガイド12の出射面は、投光レンズ13の焦点距離fを半径とする曲面を横幅方向に形成しているので、投光レンズ13の光学中心から、ライトガイド12の出射面までの距離が、ライトガイド12の横幅方向において等しい。このため、投光レンズ13を通って前方に投光されるレーザ光は、横幅方向において、この投光レンズ13の収差の影響が抑えられる。したがって、長さ方向における光強度分布が略均一な、線状のレーザ光を投光することができる。
(もっと読む)
光学式測距センサおよび電子機器
【課題】小型化され、かつ、計測の精度が高い光学式測距センサおよび該センサを含む電子機器を安価で提供する。
【解決手段】光学式測距センサは、発光素子と同一平面上に設けられた受光素子2を備える。受光素子2は、複数のセル21Aを有し、発光素子1から放射され被測定物で反射した光が集光される受光部21と、受光部21における所定の位置を記憶するフラッシュメモリ部25と、複数のセル21Aによる上記光の検出結果に基づいて、受光部21における上記光の集光位置を検出するとともに、フラッシュメモリ部25に記憶された所定の位置と受光部21における上記光の集光位置との相対的な位置関係に基づいて、被測定物までの距離を計測する信号処理回路部22とを含む。
(もっと読む)
深さ映像獲得装置および方法
深さ映像獲得装置が提供される。第1光照射部は第1照射光を照射し、第2光照射部は第2照射光を照射し、受光部は、前記第1照射光による第1反射光および前記第2照射光による第2反射光を受光する。一方、処理部は、前記受光部の第1画素から提供される電荷量に基づいて前記第1画素に対応する深さ値を算出する。 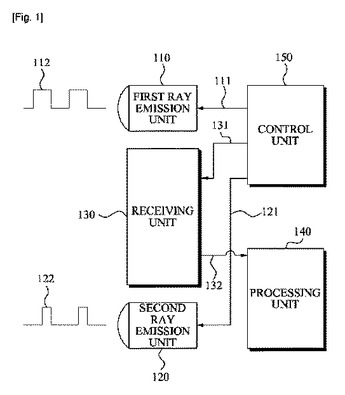 (もっと読む)
(もっと読む)
光学式測距センサおよびそれを搭載した機器
【課題】簡単な構成で小型形状で長距離の測距が可能な光学式測距センサとそれを搭載した機器を提供する。
【解決手段】光を出射する発光素子11と、発光素子11から出射された光を集光して測距対象物10に照射する投光レンズ13と、測距対象物10からの反射光を集光する受光用集光部(14,15)、受光用集光部(14,15)によって集光された反射光を受光する受光素子12と、受光素子12から出力される信号電流から測距対象物10までの距離に対応する出力信号を得る信号処理回路16とを備える。上記受光用集光部(14,15)は、測距対象物10からの反射光を反射する反射面14aを有し、その反射面14aによって、測距対象物10から受光素子12までの光路を発光素子11側に屈曲させて、反射光を受光素子12に導く。
(もっと読む)
車両周辺監視装置
【課題】視差オフセット量を算出するに際に基準とする対象物を移動する対象物として高精度に視差オフセット量を算出することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、2つの撮像装置の光軸間平行度ずれに起因する視差オフセット量が算出される。レーダ装置により距離が検出される一の照射領域に対象物が1つのみ存在し、かつ、一の照射領域に対応する撮像画像における一の局所画像領域に、抽出された対象物が1つのみ存在するという所定条件を満たす場合に、レーダ装置により対象物までの距離が検出されるとともに、2つの撮像装置により得られた対象物の視差が算出される。前記のことより、視差オフセット量を高精度に算出することができる。
(もっと読む)
相関演算方法、相関演算装置、焦点検出装置、撮像装置および相関演算プログラム
【課題】相対的に歪みが生じた一対の物体像に対応する一対のデータ列に対して、正確な相対的な変位量を算出する。
【解決手段】複数のデータが一次元上に配列された第1データ列と、複数のデータが一次元上に配列された第2データ列とを、一次元上で変位量を変えながら第1データ列と第2データ列とを相対的に変位させ、第1データ列と第2データ列の間の相互相関量を演算して相互相関量の極値が得られる第1変位量を算出する第1演算(S220)と、一次元上で変位量を変えながら第1データ列と第1データ列とを相対的に変位させ、第1データ列どうしの自己相関量を演算して自己相関量の極値が得られる第2変位量を算出する第2演算(S220)と、第2変位量に基づいて相互相関量の真の極値を与える第1変位量を選別する第3演算(S221)とを実行する。
(もっと読む)
画像撮影装置およびその距離演算方法と合焦画像取得方法
【課題】テレセントリック光学系を用いたりする光学的制限や、劣化画像復元処理を複数回行う処理量的制限などが存在した。
【解決手段】複数の絞りパターンで同一の被写体を撮影して複数の観測画像を得る観測画像撮影部221と、被写体までの距離に応じた光学伝達特性を算出する算出部222と、複数の観測画像と光学伝達特性から、被写体までの距離を算出する距離演算部206と、を備える。また、複数の絞りパターンで同一の被写体を撮影して複数の観測画像を得る観測画像撮影部221と、被写体までの距離に応じた光学伝達特性を算出する算出部222と、複数の観測画像と光学伝達特性から、ボケ量が最小となる光学伝達特性を算出する光学伝達特性演算部206と、ボケ量が最小となる光学伝達特性を利用して画像のボケを復元し合焦画像を得るボケ復元部207と、を備える。
(もっと読む)
画像処理装置、画像処理プログラム、および画像処理方法
【課題】マッチング処理時間を短縮し、高精度のマッチングを行う画像処理装置を提供する。
【解決手段】第1基準領域と第1参照領域とから画像信号と被写体の距離情報を抽出し、第1基準領域と第1参照領域との被写体距離差に基づいて、第1基準領域と第1参照領域とが類似するかどうか予備判定を行う。そして、予備判定によって、第1基準領域と第1参照領域とが類似すると判定した場合にのみ、第1基準領域と第1参照領域との類似性を示す値を算出し、マッチングを行い、第1基準領域と類似する第1参照領域を決定する。
(もっと読む)
車間距離検出装置、ドライブレコーダ装置
【課題】近距離領域において、他車両と自車両の車軸又は路面が相対的に角度をなしていても、車間距離を精度よく検出できる車間距離計測装置及びドライブレコーダ装置を提供すること。
【解決手段】他車両11を撮影する撮影手段21と、他車両11が撮影された画像データから該ナンバープレート12のプレート画像13を検出するプレート画像検出手段31と、ナンバープレート12のサイズを決定するプレートサイズ検出手段32,33と、車間距離を検出する車間距離検出手段34と、プレート画像の対角交点を検出する対角交点検出手段37と、所定の2次元座標における対角交点の移動を監視して、他車両と自車両の車軸のなす角又は他車両の路面と自車両の路面の相対的な傾斜角を検出する傾き角検出手段38、39と、なす角又は傾斜角に基づき、車間距離を補正する車間距離補正手段35と、を有することを特徴とする。
(もっと読む)
測距装置、測距方法、測距プログラム又は撮像装置
【課題】被写体距離が空間変動する場合でも、高い精度で測距を行う。
【解決部】異なる撮影パラメータで撮影したぼけの異なる複数の画像間において、測距対象画素を含有する処理対象領域(k1、k2)毎に、ぼけの相関量を演算するぼけ相関量演算部(103)と、前記処理対象領域毎に演算したぼけの相関量から、前記処理対象領域毎に被写体距離を算出する被写体距離決定部(109)と、を有する測距装置であって、前記ぼけ相関量演算部(103)は、前記処理対象領域内の画素毎に、画素単位のぼけの相関量を演算する画素相関量演算部(106)と、前記処理対象領域内の画素毎に、前記画素単位のぼけの相関量の重み係数を設定する加重制御部(107)と、前記重み係数に基づいて、前記画素単位のぼけの相関量の加重平均を行い、前記加重平均の値を前記処理対象領域のぼけ相関量として演算する加重平均演算部(108)と、を備える。
(もっと読む)
161 - 180 / 480
[ Back to top ]