
Fターム[2F112CA05]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | 自動車、車両 (415)
Fターム[2F112CA05]に分類される特許
41 - 60 / 415
物体検出装置及び物体検出方法
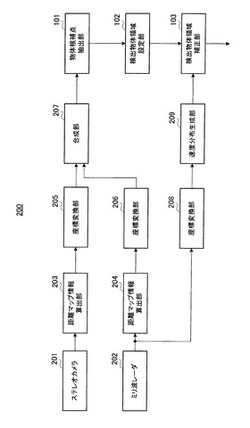
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
街路樹の枝葉高さ自動測定センサシステム

【課題】本発明は、レーザーセンサを用いて街路樹の枝葉高さを自動で測定を行い、剪定業者の目視による判断で手入れが行われる場合の人為的な誤差の発生を防ぎ、客観的かつ効率的に街路樹の剪定の必要性を判断するシステムに関するものである。
【解決手段】 地上からの高さが一定の位置に固定されたレーザーセンサを用いて街路樹の枝や葉にレーザー光を照射し、反射してくる光の強度から地上からの街路樹の枝や葉の高さが、道路交通法で定められる3.8mの高さ以下に位置する箇所を特定し、街路樹の剪定の必要性を客観的にかつ自動的にセンシングする。
(もっと読む)
ステレオカメラ
【課題】撮影画像から検出することが困難なカメラ光軸の傾きのずれを抑えることで、経時変化が距離測定精度に及ぼす影響を低減できるステレオカメラを提供する。
【解決手段】第1の単眼カメラ100と第2の単眼カメラ110とを一体に並設したステレオカメラであって、第1の単眼カメラ100および第2の単眼カメラ110は、光軸に直交する基準面100a,110aを有し、第1の単眼カメラ100および第2の単眼カメラ110の基準面100a,110aに当接させるとともに、この2つのカメラの光軸が同一直線上になる位置に並設させて連結するカメラステイ120と、カメラステイ120に取り付けられた第1の単眼カメラ100と第2の単眼カメラ110からの撮影画像を補正する画像補正手段(不図示)と、画像補正手段で補正された補正画像から視差を求め、被写体の距離を算出する距離算出手段と(不図示)、を備える。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの測距結果の精度を高めることが可能な補正機能を備えている、車両用画像認識装置を提供すること。
【解決手段】車両周辺の画像を出力する撮像手段(単眼カメラ11)と、測距対象の前記画像上の縦方向位置を前記画像から実測することによって、前記測距対象までの距離を計測する計測手段(立体物抽出部15,距離補正部16)とを備え、前記計測手段は、前記測距対象までの距離を計測する方法とは別の方法で距離が測定された道路標示の前記画像上の縦方向位置によって、前記測距対象までの距離の補正をする、車両用画像認識装置。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる、車両用画像認識装置を提供すること。
【解決手段】単眼カメラ11と、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する道路標示抽出部12と、前記所定部位の前記撮像画像上の左右方向の長さを検出する大きさ検出部13と、前記所定部位の実際の左右方向の長さと大きさ検出部13により検出された前記撮像画像上の左右方向の長さと単眼カメラ11の角度分解能とを用いて、前記道路標示までの距離を算出する距離算出部14とを備える、車両用画像認識装置。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】基準位置からのベースライン長を十分に確保できない位置での撮像画像を用いて行うステレオ視による対象物の位置特定の精度を向上させる。
【解決手段】撮像位置特定部1は、位置情報が既知である基準位置の当該位置情報と、当該基準位置で対象物を撮像して得た基準位置画像と、任意の撮像位置で当該対象物を撮像して得た撮像位置画像とに基づいて、当該撮像位置の位置情報の特定を行う。対象物位置特定部2は、既知位置の位置情報と、当該既知位置で当該対象物を撮像して得た既知位置画像と、当該撮像位置の位置情報と、当該撮像位置で該対象物を撮像して得た撮像位置画像とに基づいて、当該対象物の位置情報の特定を行う。なお、既知位置とは、撮像位置特定部1で位置情報が特定された撮像位置からの距離が前述の基準位置よりも大きい地点に位置しており、且つ、位置情報が既知である位置のことである。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】異なる場所から検出した特徴点の見え方が各検出場所で変化する場合であっても、移動体の位置を推定することが可能な、移動体位置推定装置及び移動体位置推定方法を提供する。
【解決手段】撮像部2が撮像する周囲画像の撮像範囲内へ投光した線状光が屈曲している部分である折曲部において折曲部平面から予め設定した角度で立ち上がる立ち上がり線を算出する立ち上がり線算出部16と、撮像部2が撮像する周囲画像の撮像範囲の変化に応じて、立ち上がり線算出部16が算出した立ち上がり線と、撮像部2から特徴点までの距離に基づいて、撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部とを照合する特徴点照合部20と、特徴点照合部20が照合した撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部との位置の変位量に基づいて、車両Vの位置を推定する移動体位置推定部22を備える。
(もっと読む)
車両の制御装置
【課題】路上物の誤検知により、運転者に違和感や煩わしさを感じさせる接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】物体認識部11により認識された物体と車両1との距離が、判定距離Dth以下になったときに、物体と車両1との接触を回避するための接触回避処理を実行する接触回避制御部17を備えた車両の制御装置であって、車両1の先行車両2の通過軌跡60を認識する先行車両軌跡認識部13と、物体認識部11により認識されたパイロン4が通過軌跡60上にあるか否かを判断する物体位置判断部14と、パイロン4が通過軌跡60上にあるときの判定距離Dthを、パイロンが通過軌跡60上にないときの判定距離よりも短く設定する判定距離設定部15とを備える。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
ステレオカメラ装置、校正方法およびプログラム
【課題】ステレオカメラ装置、校正方法およびプログラムを提供すること。
【解決手段】ステレオカメラ装置100は、基線長だけ離間して設置された2台のカメラ102、104を備え、演算部120は、2台のカメラ102、104によって取得された画像から、時間間隔を隔てた同一の対応点の視差を取得して距離計算のために使用される視差オフセット値を対応点毎に計算し、個々の対応点について得られた視差オフセット値の値から最適値を決定し、最適値をステレオカメラ装置を使用した距離Zの計算のための校正パラメータとして更新する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】ロボットや車両等の移動物体に搭載しても途切れることなく常に距離を計測することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置は、搭載された移動物体の移動方向に投光パターンを照射する投光部2と、投光パターンが照射された方向の画像を撮像する撮像部3と、撮像部3で撮像された画像から計測対象物に照射された投光パターンのドットを抽出する照射光抽出部4と、照射光抽出部4で抽出された投光パターンの照射方位を算出する照射方位算出部5と、照射方位と撮像部3の撮像方向と投光部2と撮像部3との間の距離とを用いて幾何学的関係から計測対象物までの距離を計測する距離計測部6とを備えており、投光パターンは、移動物体の移動方向にある消失点から放射される直線上に複数のドットを配置した構成になっていることを特徴とする。
(もっと読む)
41 - 60 / 415
[ Back to top ]