
Fターム[2F112CA05]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | 自動車、車両 (415)
Fターム[2F112CA05]に分類される特許
21 - 40 / 415
カメラシステム、衝突予測システム、駐車ガイドシステム
【課題】距離精度を向上できる。
【解決手段】正対する光の進行方向を一方光へ変える少なくとも二つの光学素子と、前記光学素子により進行方向を変えられた光を電気信号に変換する撮像素子と、を有する光学部と、少なくとも二つの前記光学部の撮像素子が変換した電気信号に基づいて距離情報を算出する距離算出部と、を備える。
(もっと読む)
画像処理方法、ステレオカメラシステム

【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
距離測定装置及びプログラム
【課題】異なる波長特性を有する複数の撮像手段を用いて、特定の対象物までの距離を精度よく測定することができるようにする。
【解決手段】各々感度を有する波長帯が異なる第1撮像装置12及び第2撮像装置14によって、各々異なる視点から所定領域を撮像する。対象物抽出部32によって、撮像された撮像画像の各々から、人間の肌についての光の波長帯の各々の反射強度に関する予め定められた条件に基づいて、人間の肌領域を抽出する。位置合わせ部34によって、撮影画像の各々から抽出された人間の肌領域の位置合わせを行って、人間の肌領域における視差量を算出する。距離測定部36によって、算出された視差量に基づいて、人物までの距離を測定し、分光データ生成部38によって、人間の肌領域の分光データを生成する。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
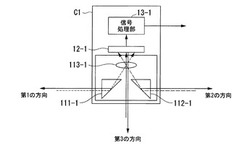
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
車載カメラの光軸変動量の測定方法
【課題】車両に搭載されたステレオカメラの温度変化による光軸変動量を精度良く測定する車載カメラの光軸変動量の測定方法を提供する。
【解決手段】第1カメラを回転位置が180度異なる通常位置と反転位置とに切り替えて、基準温度における第1カメラ及び第2カメラの撮像画像間でのターゲットの画像部分の視差である第1視差と第2視差を算出する第1,第2視差算出工程と、特定温度における第1カメラ及び第2カメラの撮像画像間での前記ターゲットの画像部分の視差である第3視差と第4視差を算出する第3,第4視差算出工程と、第1視差と第3視差の差分及び第2視差と第4視差の差分に基づいて、特定温度に変化したときの第1カメラ及び第2カメラの光軸変動量を算出する光軸変動量算出工程とを含む。
(もっと読む)
車載レーザレーダ装置
【課題】検知すべき範囲内に存在する物標に関する物標情報を効率良く求めることが可能な車載レーザレーダ装置を提供する。
【解決手段】操舵角度センサによってステアリングの操舵角度が取得されると、レーザ光を一括して照射し該レーザ光の反射光を受光した受光信号に基づいて、測距部20が検知実行範囲に存在している検知対象物との距離を表す距離データを測距ユニット毎に求める。そして、制御部30は、測距部20にて求められた距離情報に従って検知対象物に関する情報を生成する。ここで、制御部30は、取得された操舵角度に基づいて距離情報の提供元となる測距IC21の一部を選択することで、検知実行範囲を設定する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
移動体検知システム
【課題】移動体に衝突されずに移動体を精度良く検知する移動体検知システムを提供する。
【解決手段】移動体検知システム1は、ステレオ動画像を撮像するステレオカメラ3と、ステレオ動画像が入力されるシステム本体4とを備える。システム本体4は、ステレオ動画像を処理する処理部6を有する。ステレオカメラ3及びシステム本体4は、移動体の移動に支障しないように移動経路外に設置される。ステレオカメラ3は、移動経路上に空間範囲として設定された検知範囲を撮像範囲に含むステレオ動画像を撮像する。処理部6は、ステレオ動画像における各フレームの画像並びにステレオカメラ3の光軸間隔及び焦点距離に基づいて、その移動体の空間位置を算出し、算出した移動体の空間位置が検知範囲内に入ったとき、その移動体を検知したと判定する。これにより、ステレオカメラ3及びシステム本体4は、移動体に衝突されずに移動体を精度良く検知する。
(もっと読む)
ステレオカメラ装置、視差画像生成方法
【課題】広い視野角と視野内の特定領域では高い測距精度を両立したステレオカメラ装置を提供すること。
【解決手段】二つの撮像手段C0、C1と、画像データを等距離射影画像に投影する二つの光学系21と、二つの等距離射影画像から第一の変形画像データ及び第二の変形画像データを生成する第一の画像生成手段31,33と、二つの等距離射影画像の所定領域から第三の変形画像データ及び第四の変形画像データを生成する第二の画像生成手段32,34と、第一の変形画像データと第二の変形画像データから第一の視差画像を生成する第一の視差画像生成手段35と、第三の変形画像データと第四の変形画像データから第二の視差画像を生成する第二の視差画像生成手段36と、第一の変形画像データと第三の変形画像データの倍率により定まる第一の視差画像の画素の画素値を、第二の視差画像の画素の画素値で置き換える画像合成手段37と、を有する。
(もっと読む)
ステレオカメラ装置、画像補整方法
【課題】行毎の撮影時刻が異なる撮像素子を利用したステレオカメラにおいて、光軸ずれによる画像の位置ずれだけでなく、動体歪みも補正することが可能なステレオカメラ装置を提供すること。
【解決手段】2つの画像の相関度から被写体との距離情報を検出するステレオカメラ装置100であって、行と列に配列された画素のうち行毎の撮影時刻が異なる撮像素子C0,C1が2つ配置された画像撮影手段200と、2つの撮像素子の相対的な位置ずれ量を検出する位置ずれ検出手段12と、前記位置ずれ検出手段が検出した垂直方向の前記位置ずれ量に応じて、2つの前記撮像素子の一方の撮影開始時刻を変更する開始時刻変更手段13と、2つの前記撮像素子が撮影した2つの画像の一方を、垂直方向の前記位置ずれ量と同程度、垂直方向に平行移動させる補正手段11と、を有することを特徴とする。
(もっと読む)
画像処理装置および方法、ならびに移動体衝突防止装置
【課題】近距離範囲で物体を正確に認識できる画像処理装置および方法、ならびに移動体衝突防止装置を提供。
【解決手段】画像処理装置は、撮像部、および撮像部が撮像した画像を処理する画像処理部を備え、撮像部は、撮像レンズ、撮像レンズを駆動しフォーカシング距離を変更する合焦機構、および撮像素子を有する。合焦機構は、撮像レンズを駆動して撮像レンズの光軸方向における異なる位置の物体を撮像素子に鮮明に結像させるように順次フォーカシング距離を変更するフォーカススイープを行う。撮像部は、フォーカススイープにおいて複数の異なるフォーカシング距離に応じてそれぞれの画像を撮像する。画像処理部は、この撮像された複数枚の画像から、各画像において鮮明に結像された物体を認識し、それぞれの画像の撮像時のフォーカシング距離に対応してこの認識された物体の位置を表示する物体分布画像を生成する。
(もっと読む)
カメラシミュレーション装置、カメラシミュレーション方法、及びカメラシミュレーションプログラム
【課題】効率的にカメラパラメータのキャリブレーションを行う。
【解決手段】カメラシミュレーション装置において、レンズシステムを模擬した模擬カメラ系で撮像した画像を取得する模擬カメラ系画像取得手段と、前記レンズシステムの設計値での焦点距離を用いたピンホールカメラ系で撮像した画像を取得するピンホールカメラ系画像取得手段と、模擬カメラ系画像取得手段により得られる第1の画像と、前記ピンホールカメラ系画像取得手段により得られる第2の画像との差分値を出力し、前記ピンホールカメラを用いた三角測距の視差に対して、前記差分値を用いて視差誤差の予測値を出力する視差誤差出力手段とを有することで、上記課題を解決する。
(もっと読む)
21 - 40 / 415
[ Back to top ]