
Fターム[2F112CA14]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されていないもの (1,021) | 高さ(立木、建造物等を三角測量的に測定) (16)
Fターム[2F112CA14]に分類される特許
1 - 16 / 16
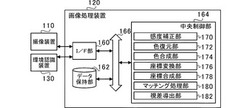
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
計測装置、計測方法、及びプログラム

【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
街路樹の枝葉高さ自動測定センサシステム
【課題】本発明は、レーザーセンサを用いて街路樹の枝葉高さを自動で測定を行い、剪定業者の目視による判断で手入れが行われる場合の人為的な誤差の発生を防ぎ、客観的かつ効率的に街路樹の剪定の必要性を判断するシステムに関するものである。
【解決手段】 地上からの高さが一定の位置に固定されたレーザーセンサを用いて街路樹の枝や葉にレーザー光を照射し、反射してくる光の強度から地上からの街路樹の枝や葉の高さが、道路交通法で定められる3.8mの高さ以下に位置する箇所を特定し、街路樹の剪定の必要性を客観的にかつ自動的にセンシングする。
(もっと読む)
倒壊範囲判定器
【課題】簡易な方法で正確に倒壊危険範囲を判定することができる倒壊範囲判定器を提供する。
【解決手段】垂直に保持されると共に上端部がゴム栓1で閉止され、且つ少なくとも一部が透明な第1の垂直管体9、及び第2の垂直管体4と、各垂直管体4、9の下部に夫々両端部を連通接続された連設管体5と、密封空間である第1の垂直管体9及び第2の垂直管体4、並びに連設管体5内部に適量充填された液体7と、第1の垂直管体9及び第2の垂直管体4の各透明部に夫々形成されて液体7の規定液位を示す第1の液位目印6、及び第2の液位目印3と、第1の垂直管体9の上部から垂直方向へ伸縮自在に支持された伸縮部材8と、を備えて構成されている。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
測定装置
【課題】ラインセンサにより高さのみ及び高さと変位の両方を高精度に測定することができ、設置作業が容易な測定装置を提供する。
【解決手段】測定装置において、5つ以上の高さ方向の絶対座標が分かるキャリブレーションターゲット2と、前記キャリブレーションターゲット2の画像を撮像し、撮像した画像の画像信号を出力するラインセンサ1と、前記画像信号に基づき画像情報を作成する入力画像作成部と、前記画像情報に基づきターゲット座標を検出するターゲット検出部と、前記ターゲット座標及び予め取得した絶対座標に基づきDLT法の係数を算出する係数算出部と、前記係数に基づき前記ラインセンサ1の姿勢を計算する姿勢計算部と、前記係数に基づき前記ラインセンサ1の焦点距離を計算する焦点距離計算部と、前記係数に基づき前記ラインセンサ1の位置を計算する位置計算部とを備えた。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
架空ケーブルの地上高測定装置
【課題】ケーブル状の細い被測定部でも簡単に地上高さを測定する。
【解決手段】略上方の所定の立体角の範囲で測長レーザー光を2次元走査して測長を行なうレーザーレーダと、該測長レーザー光の照射方向と鉛直方向の成す角度と、該測長の結果とに基づき前記範囲内における最低の鉛直高さを得るコンピュータと、該最低の鉛直高さを数値で表示する表示器と、を備えた。範囲内の2次元走査は1乃至数秒以内で行なえることが望ましい。走査後に、最低値が得られたレーザー照射方向に固定して照射を行い、ケーブルに当たったレーザー光を目視で確認できるようにしても良く、或いは範囲内の各所での測定結果を被測定物の形状や位置が認識できるようにグラフィカル表示してもよい。
(もっと読む)
対象検出装置、対象検出方法、および対象検出プログラム
【課題】レーザセンサを用いた対象検出技術において、広い検出範囲を維持したまま、誤検出を減らす。
【解決手段】対象検出方法は、レーザ投受光部の取付位置から斜め下方にレーザビームを発射することで対象を検出するための方法であって、レーザ投受光部から被検出物までの距離情報を取得する距離情報取ステップと、被検出物がレーザ投受光部側に接近してくる際に被検出物の追跡が途切れたか否かを判定可能である追跡消滅判定ステップと、被検出物の追跡が途切れた場合に、被検出物の追跡が途切れる直前の距離情報に基づいて、被検出物が対象であるか又は非対象であるかを判定する対象判定ステップとを備えている。
(もっと読む)
距離測定装置
【課題】手ぶれに起因する測定値のばらつきを少なくすることができる距離測定装置を提供する。
【解決手段】同じ対象物に対して8回連続して角度センサ31で筐体の重力方向の傾き角度を測定した後、対象物までの直線距離を測距部50で測定する。8回連続して角度を測定したときの最大値と最小値との差Aを求め、差Aに応じて角度分解能を調整し、水平距離演算、高さ演算等を行う。
(もっと読む)
3次元計測方法および3次元計測装置
【課題】計測対象部位が限定される場合でも、計測結果を計測対象物の全体像に対応づけてわかりやすく示した画像を表示する。
【解決手段】特定の点や領域に計測対象が限定されたワークを対象に、このワークを正面視する方向から撮像するカメラと、斜め上方から撮像するカメラとにより撮像し、各計測対象部位の高さを計測する。そして、計測処理に使用した正面視画像の各画素を、当該画像の座標系を構成するx,y軸と高さを表すz軸とによる3次元座標系に仮想配置して、透視変換を行うことにより、計測結果を表す処理結果画像を生成する。各画素のうち、高さ計測の対象とされた画素には、z座標として計測値が設定され、その他の画素のz座標はゼロ値に設定される。また、画像中の計測対象点P1´〜P4´や計測対象領域R´には、位置の識別のための+マークや高さを表す補助線が設定される。
(もっと読む)
車両の障害物認識装置
【課題】単一のカメラで、ステレオカメラのように、物標までの距離を検出することができる車両の障害物認識装置の提供。
【解決手段】車両前方に向かって交互に光を照射する左光源1及び右光源2と、車幅方向中央に設けられ、車両前方を撮像する単一のカメラ3と、カメラ3によって撮像された車両前方の画像から、左右の光源1及び2でそれぞれ照らされた物標20の第1の影21及び第2の影22を抽出する影抽出部4と、第1の影21の延びる方向と第2の影22の延びる方向とが成す角度βに基づいて、車両100から当該物標20までの距離を求める距離測定部5と、を備える。
(もっと読む)
距離測定装置
【課題】表示器上に表示された数字等の文字がそれぞれどんな測定結果を表すのかを即座に判断できるようにする。
【解決手段】測定光が出射された位置から被測定物までの直線距離及び測定光が出射された位置と被測定物とを結ぶ直線と水平線とのなす傾斜角度を、直線距離及び傾斜角度に対応する三角形とともに筐体2の側面に設けた外部表示器40bに表示させる。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するためのシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
1 - 16 / 16
[ Back to top ]