
Fターム[2F112EA07]の内容
Fターム[2F112EA07]に分類される特許
1 - 20 / 58
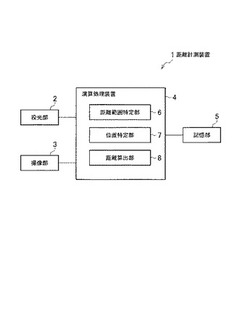
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
反射型光電センサ

【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
距離速度測定装置
【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
光学的情報読取装置
【課題】測距処理の高速化を図り、確実に測距を行うことができる光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1Aは、光の照射領域102aと非照射領域103aが組み合わせられた測距パターン101aを読取対象物に形成する測距光Saを出射する測距光出射部2を備え、読取対象物に形成された測距パターン101aを固体撮像素子3で撮像して測距パターン101aの画像を取得し、画像信号で信号が落ち込む部分を検出して、測距パターン101aの非照射領域103aの座標に基づき測距を行う。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
距離計
【課題】ユーザが誤った取り扱いをするのを回避することができ、これを通じて正確な計測結果を与えることができる距離計を提供する。
【解決手段】ハウジング10と、ハウジング内に設けられた、光ビームを用いて、目標物までの距離を非接触で計測するための測距部20と、ハウジング上に設けられた、ユーザが選択しうるようになっている少なくとも1つの計測起点50A〜50Dと、ハウジング上に設けられた、少なくとも測距部20を操作しうるようになっている操作ボタン30と、ハウジング上に、操作ボタンと関連づけられて設けられた、制御条件、および/または計測起点から目標物までの計測距離が示されるディスプレイ40とを備える距離計100において、ハウジング上に、ディスプレイとは別個に、計測起点50A〜50Dに1対1で対応し、いずれかの計測起点が選択された場合にアクティブ状態となる少なくとも1つの視覚的認識可能手段を設ける。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】照明部と撮像部の校正時からの変化を異常として検知する。
【解決手段】対象物体の三次元形状モデルの情報を保持する保持部と、撮像部により撮像された対象物体の距離情報を取得する距離情報取得部と、撮像部により撮像された対象物体の濃淡画像を取得する濃淡画像取得部と、保持部に保持された三次元形状モデルの情報と、距離情報とに基づいて対象物体の位置および姿勢を推定する第1位置姿勢推定部と、保持部に保持された三次元形状モデルの情報を濃淡画像上に投影した投影情報と、濃淡画像の幾何特徴とに基づいて対象物体の位置および姿勢を推定する第2位置姿勢推定部と、第1位置姿勢推定部により推定された第1推定値と第2位置姿勢推定部により推定された第2推定値との差分値が閾値より大きいか判定する判定部と、判定部により差分値が閾値より大きいと判定された場合に、撮像部による撮像条件の校正が必要な状態であることを報知する報知部と、を備える。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
視差センサ、及び視差画像生成方法
【課題】壁などの広い平面等を含む対象物であっても、簡単な照明装置のみで照度変化に関する特徴量を十分大きくすることができ、対象物を確実に検知することができる視差センサ等を提供する。
【解決手段】第1画像及び第2画像の撮像方向に広い平面等を含む対象物がある場合に、その対象物に対して第1画像及び第2画像の間で視差が生じる方向に照度が変化している照度分布を有する光を照射している状態で、パルス信号比較回路が、隣接する電圧・パルス幅変換回路が出力する2つのパルス幅画素信号を比較し、2つのパルス幅画素信号の+方向の差と−方向の差とをそれぞれ比較パルス信号として出力する。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
撮像装置
【課題】撮影対象となる被写体の状態が変化することなく、投光状態の異なる画像を取得することができる撮像装置を提供する。
【解決手段】 被写体Xを投光する投光手段5と、被写体Xを撮影して画像データを取得する撮像手段3と、投光手段5の投光タイミング及び撮像手段3の撮影タイミングを制御するタイミング制御手段6と、取得した画像データを蓄積する画像データ蓄積手段7と、該画像データ蓄積手段7に蓄積された画像データをコンピュータ11へ転送するインターフェース12と、を備え、タイミング制御手段6は、撮像手段3に連続撮影させるとともに、投光手段5による投光状態を連続撮影に同期させて切り替え、画像データ蓄積手段7は、連続撮影された画像データを蓄積し、連続撮影が終了すると、画像データ蓄積手段7に蓄積された画像データをインターフェース12を介してコンピュータ11へと転送する。
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
情報処理装置および物体検出方法
【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、より高い時間精度で距離測定方法を提供する。
【解決手段】発光時点調整部20は、時間ベースユニット38で二つの周波数をベースにして高分解能の時間ベースを提供し、例えば60.975psの倍数で光パルスの発光を遅らせる。更に発光時点調整部20は発光時間微調整ユニット40を有し、多数の個別測定値を使って例えばガウス形状の発光パターンを形成することにより、実際に生じている発光時間遅延を、物理的に可能な発光時点と比べて、属する受光パターンの重心により理論的に任意に細分化する。即ち、時間ベースユニット38が直接的に分解能を変更し、その分解能が発光時間微調整ユニット40により、統計的な重心シフトを介して間接的に更に細分化される。このように高分解能にした時間区分で送られた光パルスが受光され、A/D変換部36でデジタル化され、ヒストグラムユニット42でヒストグラム解析が行われる。
(もっと読む)
1 - 20 / 58
[ Back to top ]