
Fターム[2F112FA45]の内容
Fターム[2F112FA45]に分類される特許
161 - 180 / 645
画像処理装置および画像処理方法
【課題】多重解像度画像を用いた対応点探索処理の処理性能を改善する。
【解決手段】互いに対応する画像内容を含んだ原基準画像と原参照画像とを取得する画像取得手段と、取得した原基準画像と原参照画像とを低解像度化することによって、解像度の異なる複数の画像を階層的に生成する多重解像度画像作成手段と、注目階層に属する注目基準画像に注目点を設定する注目点設定手段と、注目点についての、注目基準画像と注目参照画像との視差を求める視差特定手段と、視差特定手段が視差を求めるにあたって1)注目点を内包するウィンドウが注目基準画像内に収まるときには、ウィンドウ内の画像情報を用いる第1視差特定規則を、2)ウィンドウが注目基準画像からはみ出すときには、注目基準画像の外部領域からの寄与度を第1視差特定規則よりも低めた第2視差特定規則を、選択的にそれぞれ適用させる選択適用手段と、を備える。
(もっと読む)
車両操縦用画像表示装置および方法

【課題】夜間または濃霧などの視界の悪い状況下で、車両前方の路面領域を画像表示することができ、これにより舗装路、未舗装路を区別することなく移動体を操縦することができる車両操縦用画像表示装置および方法を提供する。
【解決手段】車両1に搭載された赤外線カメラ10により車両前方の特定範囲の赤外線画像2を撮影し、車両に搭載された3次元形状測定装置20により前記特定範囲の3次元形状3を計測し、演算処理装置30により3次元形状から車両が通りやすい路面領域4を検出し、赤外線画像2上において路面領域を強調した補正赤外線画像5を形成し、表示装置40により補正赤外線画像5を表示する。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】補間エラーを防止し精度の高い距離画像の生成を可能とする装置および方法を提供する。
【解決手段】例えばコントラスト検出法などによって画像に含まれる領域の輪郭部の距離情報を取得し、距離情報の取得できていない領域内部の距離値を推定する構成において、領域の輪郭部の距離情報を用いて領域を構成する平面などの領域面を定義する領域面定義式を算出する。算出した領域面と距離情報の座標位置を比較し、領域面からの離間度の大きい距離情報を異常データと判定し、異常データを除く距離情報を適用して領域内部の距離を推定する補間処理を行う。本構成により補間エラーを防止した高精度な距離画像を生成することが可能となる。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
形状検出装置及びロボットシステム
【課題】種々の形状の検出対象物に対してもそれぞれ高速で且つ精度良く対象物の3次元形状を検出できるようにした、形状検出装置及びこれを用いたロボットシステムを提供する。
【解決手段】ランダムに配置された複数の検出対象物を収納したストッカと、ストッカ内の複数の検出対象物の画像及び距離を取得する距離画像センサと、距離画像センサの検出結果と設定されたアルゴリズムとに基づいてストッカ内の検出対象物のそれぞれの位置及び姿勢を検出するセンサコントローラと、センサコントローラが使用するアルゴリズムを選択し、センサコントローラのアルゴリズムの設定を行なうユーザコントローラとを有して構成する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
位置検出装置
【課題】位置検出に伴う計算量を削減し、処理の高速化及び装置の低コスト化を図る。
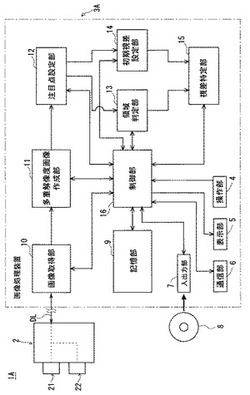
【解決手段】一対の画像からなるステレオ画像を所定の時間間隔で取得する画像取得部11と、前記ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内の検出対象領域にマッチングする前記比較画像内のマッチング領域を探索する探索部12と、前記基準画像内の検出対象領域の位置及び探索部12により探索された比較画像内のマッチング領域の位置から求まる視差に基づいて、当該ステレオ画像内に存在する物体の撮影地点からの距離を算出する距離算出部13と、距離算出部13により算出された距離に応じて、当該ステレオ画像の次に取得されるステレオ画像についての探索部12による前記比較画像内の探索範囲を変更する探索範囲変更部14とを備える位置検出装置である。
(もっと読む)
三次元形状測定装置
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
三次元形状測定装置
【課題】測定領域が狭小の場合のみならず比較的広大の場合であっても、被測定物の三次元形状を測定可能とする三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するパルス光源30及びチャープ導入装置32と、生成された前記光パルスをワーク24の表面26に照射し、前記ワーク24で反射された前記パルス光を所定のタイミングで所定の光量だけ切り出し、前記光パルスの反射光像を取得する反射光像取得部70と、取得された前記反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得するカラー二次元検出器52とを備え、反射光像取得部70は、ワーク24に照射される前記光パルスの照射領域42を拡縮する焦点位置補正部66と、拡縮された照射領域42に応じて前記光パルスを切り出す前記所定の光量を調整するシャッタ動作補正部68とを有する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
信号生成装置および撮像装置
【課題】測距演算に適した露光量に対応した信号を生成することができる。
【解決手段】第1画素列PDA_b1は、光電変換素子を含む複数の画素PD_b(1)〜PD_b(2k−1)を備える。第2画素列PDA_b2は、光電変換素子を含む複数の画素PD_b(2)〜PD_b(2k)を備える。制御部300は、第1画素列PDA_b1の露光量と第2画素列PDA_b2の露光量とが異なるように、第1画素列PDA_b1の露光量と第2画素列PDA_b2の露光量とを制御し、この露光量に基づいた信号を第1画素列PDA_b1と第2画素列PDA_b2とが出力するように制御する。
(もっと読む)
3D光学作像システム
【課題】簡単なハードウェア構成で高解像度の3Dキャプチャが可能な3Dカメラを提供する。
【解決手段】3D作像装置30は、一連のIR光のパルスを射出する光源装置42と、各々がIR光に感度のある感光セルのアレイを有するカメラ60と、被写体からの光を感光セルに、光の各光線が共通の焦点を通るように送るための撮像レンズと、光のパルスの射出と同期して、カメラ60によってキャプチャされた画像を交互に記憶する2個のメモリ64及び66と、2個のメモリ64及び66に記憶された2個の連続した画像と、光源装置42、カメラ60及び対象点102の位置とを利用して、被写体の深度マップを計算する信号処理装置と、を含む。光源装置42から射出される光のパルスは、交互に第1及び第2の強度を有する。
(もっと読む)
位置計測システム及び位置計測方法
【課題】対象物のステレオ視によって対象物の位置を計測するに際し、量子化誤差を軽減することができる位置計測システム及び位置計測方法を提供する。
【解決手段】位置計測システム1では、対象物Tのステレオ視において2台のカメラの視線領域が重なる重複領域に対象物Tの真値(真の座標)が存在することに鑑み、視線領域SR1,SR2が、カメラ21,22の移動によって、隣り合う一方の視線領域から他方の視線領域に移動したことを検出したときには、視線領域SR1と視線領域SR2とが重なる重複領域DR1のうち、一方の視線領域と他方の視線領域との境界領域に対象物Tが位置すると判断し、対象物Tの位置を算出する。これにより、重複領域DR1から境界領域へと、真値が存在する領域が狭められる。
(もっと読む)
撮像装置及び撮像方法
【課題】遠方の被写体であっても距離を測定可能で且つ複数視点での撮像が可能な小型の撮像装置を提供する。
【解決手段】それぞれ垂直方向に距離をおいて同一方向を撮像可能な2つの撮像部からなるペア(撮像部1a,2aのペア、撮像部1b,2bのペア、撮像部1c,2cのペア、撮像部1d,2dのペア、撮像部1e,2eのペア)を有する撮像装置100であって、各ペアの撮像方向は異なっており、ペアのうちの一方の撮像部(1a〜1e)を支持する上支持体1と、ペアのうちの他方の撮像部(2a〜2e)を支持する下支持体2と、上支持体1と下支持体2を垂直方向に相対移動可能に連結する連結部とを備える。
(もっと読む)
画像処理装置及び測距装置の画像処理方法
【課題】フォトンの量が少ない夜間や日陰においても、測距に必要な撮像画像を得ることができる画像処理装置及び測距装置の画像処理方法を提供する。
【解決手段】飽和順位のうち、原色フィルタ(R、G、B)より上位であるフィルタ(例えばW、Mg、Cy、Ye,Riフィルタ)を通して得られた(例えばW、Mg、Cy、Ye,Ri画素からなる)画像信号同士を比較することで、少なくともR画素、G画素、B画素からなる画像信号よりもS/N比が大きな信号に基づいて、最適な対応点探索を行える。
(もっと読む)
情報処理装置および物体検出方法
【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
測距装置
【課題】不要なポインタ光の送光を止める測距装置を得る。
【解決手段】測距装置は、対象物に向けて測距用の光を送光する第1送光手段4と、測距開始操作信号に応じて、測距用の光が対象物との間を往復する時間に基づいて対象物までの距離を測る測距手段1,2と、対象物に向けて測距用の光と異なるポインタ光を送光する第2送光手段4と、第1送光手段4、第2送光手段4および測距手段1,2をそれぞれ制御する制御手段1とを備え、制御手段1は、第2送光手段4からポインタ光が送光されている状態で測距開始信号を受けると、ポインタ光の送光を停止させてから距離測定を開始させる。
(もっと読む)
正反射面の相対位置を測定する方法及び装置
【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
交換可能なクロマティックポイントセンサ構成要素の強度補償
【課題】交換可能なクロマティックポイントセンサ構成要素の強度補償を提供する。
【解決手段】クロマティックポイントセンサ(CPS)の光源および波長検出器サブシステムの非均一応答に補償を提供する方法が提供される。光源からの光は、CPS光学ペンを通る測定路を迂回し、迂回光を波長検出器に提供して、検出器のピクセルにわたって分布した未処理強度プロファイルを提供する光路に入力される。結果として生成される未処理強度プロファイル信号のセットが解析されて、未処理強度プロファイル信号内に発生する波長依存強度変動の誤差補償係数のセットが決定される。後に、誤差補償係数を適用して、本発明を使用しない場合にはCPS距離測定プロファイル信号データのピーク領域内の信号の形状に発生する歪みおよび非対称性を低減することができる。開示される方法は、様々な実施形態において、CPS構成要素に強化された精度、ロバスト性、現場でのテスト、および交換可能性を提供することができる。
(もっと読む)
距離測定方法
【課題】ステレオ計測法において被測定物のある角部と撮影した画像における角部の像とを品質良く対応させる方法を提供する。
【解決手段】ワークと撮像装置との距離を測定する距離測定方法にかかわる。ワークの形状情報を用いて参照部を設定し、参照部を複数の方向から見た参照部画像を生成するステップS1の参照部設定工程と、ワークを複数の方向から撮像装置にて撮影し、複数の撮影画像を生成するステップS3の撮像工程と、参照部画像を用いて複数の撮影画像において参照部が撮影された参照部像の場所を検出するステップS4の参照部検出工程と、参照部像の場所の情報を用いてワークと撮像装置との距離を検出するステップS5の距離測定工程と、を有する。
(もっと読む)
161 - 180 / 645
[ Back to top ]