
Fターム[2F112FA45]の内容
Fターム[2F112FA45]に分類される特許
101 - 120 / 645
ステレオカメラ装置、校正方法およびプログラム
【課題】ステレオカメラ装置、校正方法およびプログラムを提供すること。
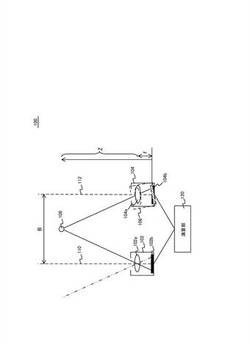
【解決手段】ステレオカメラ装置100は、基線長だけ離間して設置された2台のカメラ102、104を備え、演算部120は、2台のカメラ102、104によって取得された画像から、時間間隔を隔てた同一の対応点の視差を取得して距離計算のために使用される視差オフセット値を対応点毎に計算し、個々の対応点について得られた視差オフセット値の値から最適値を決定し、最適値をステレオカメラ装置を使用した距離Zの計算のための校正パラメータとして更新する。
(もっと読む)
撮像装置および取得方法

【課題】ストロボによる補助光の発光あり/なしの画像から距離に関する情報を算出する際、被写体の反射率の影響で精度が悪かった。
【解決手段】同じ被写体像に対して補助光を照射した第1の画像と、補助光を照射しない第2の画像と、を取得する。さらに、取得した第1の画像を構成する画像データと、第2の画像を構成する画像データとから、被写体の反射率の影響が除去された外光に関する値を算出する。そして、算出した値と光が距離に応じて減衰する特性を基に、撮像装置から被写体までの距離に関する情報を取得する。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
撮像装置
【課題】 被測定対象物までの距離を測距する測距装置を備えた撮像装置に関する。
【解決手段】 被写体を撮像する撮像光学系と、撮像光学系による光学像を電気信号に変換する撮像素子と、被写体までの距離を測定する測距センサと、測距センサへの電力の供給を制御する電力供給制御手段と、を備え、測距センサは、一つの半導体ウェハ上に形成された複数の素子であり、電力供給制御手段は、撮像装置に設定される動作条件に応じて、測距センサを構成する素子の電力を供給する撮像装置による。
(もっと読む)
空間光パターンに基づく深さデータの生成
空間光パターンに基づいて深さデータを生成するための技術について一般に説明される。いくつかの例では、深さデータを生成する方法が、空間光パターンが投射される1つまたは複数の物体の画像を取得することであって、画像内の空間光パターンのぼやけが深さ方向に単調に増加または減少する、取得することと、対象画素周りの局所画像領域にある画像の空間周波数成分値を算出することと、深さと空間周波数成分値との事前に設定した関係を用いて、算出した空間周波数成分値に対応する深さデータを求めることとを含む。 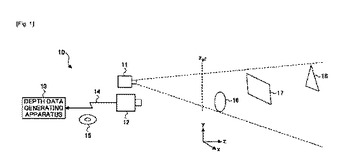 (もっと読む)
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】本発明は、被写体が一様なテクスチャを持つため対応点が複数存在する場合や、一部の色が異なる被写体の場合であっても、偽マッチングおよびオクルージョンの有無を正しく判定し、奥行値の誤推定を低減する奥行推定装置を提供する。
【解決手段】奥行推定装置1は、映像入力手段10と、対応画素差分値を演算する対応画素差分演算手段20と、近傍画素の画素値を出力する近傍画素値出力手段30と、近傍画素の奥行値を出力する近傍奥行値出力手段40と、近傍画素の奥行値に対応する近傍奥行対応画素値を出力する近傍奥行対応画素値出力手段50と、最小差分値または平均差分値を選択差分値として決定する差分値決定手段60と、平滑化を行う平滑化手段80と、平滑化差分値の全画素での和が最小となる仮定奥行値を、基準映像の各画素の奥行値とする奥行値決定手段90とを備える。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
ビーム光投受光装置
【課題】同軸系タイプのビーム光投受光装置のコンパクト化及び組立て調整作業の容易化を図る。
【解決手段】光源210からスキャンミラー240に向かう投光ビームの光路と、対象領域内の物体から反射しスキャンミラー240から受光素子260に向かう戻り光の光路を分離する投受光分離部材を、1つのプリズム230で形成し、プリズム230は、投光ビームをスキャンミラー240方向に反射する反射領域231(外側反射面)と、スキャンミラー240からの戻り光を透過する透過領域232と、この透過領域232を透過した戻り光をプリズム内部で受光素子260方向に反射する内側反射面Dと有する構成である。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
測距装置、レンズシステムおよび撮像装置
【課題】撮像装置のズームレンズ側で要求される合焦精度に対応した測距仕様を満たす測距装置を提供することを目的とする。
【解決手段】撮像装置によって撮像される被写体までの距離を三角測距の原理によって測定する測距装置であって、前記被写体までの距離の測距可能な最大遠距離が、前記撮像装置の過焦点距離の最大値の1/2以上とする測定手段を有する測距装置を提供する。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
回折光学素子、並びに測距装置及び測距方法
【課題】ねじれビームを出射する小型の回折光学素子、並びに、小型の測距装置、及び小型の回折光学素子を用いた測距方法を提供する。
【解決手段】回折光学素子130は、x軸、y軸、及びz軸からなる座標空間において、前記x軸と平行な偏平面を形成しながら前記z軸の方向へ進行する平行光の進行方向を、前記z軸の方向へ所定の距離だけ進行した位置において、前記偏平面の前記x軸と成す回転角度が所定の角度となるように変更する第1回折格子が形成されている。
(もっと読む)
距離計測装置及び距離計測方法
【課題】ロボットや車両等の移動物体に搭載しても途切れることなく常に距離を計測することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置は、搭載された移動物体の移動方向に投光パターンを照射する投光部2と、投光パターンが照射された方向の画像を撮像する撮像部3と、撮像部3で撮像された画像から計測対象物に照射された投光パターンのドットを抽出する照射光抽出部4と、照射光抽出部4で抽出された投光パターンの照射方位を算出する照射方位算出部5と、照射方位と撮像部3の撮像方向と投光部2と撮像部3との間の距離とを用いて幾何学的関係から計測対象物までの距離を計測する距離計測部6とを備えており、投光パターンは、移動物体の移動方向にある消失点から放射される直線上に複数のドットを配置した構成になっていることを特徴とする。
(もっと読む)
2光束アッセンブリ及びクロマティックポイントセンサ装置の動作方法
【課題】2つの表面領域を同期測定できるクロマティックポイントセンサ装置(CPS装置)の動作方法を提供すること。
【解決手段】2光束アッセンブリが取り付けられた1光束CPS光学ペンを用いたセンサ装置の第1測定光束および第2測定光束を、それぞれ第1表面領域および第2表面領域に位置合わせする。2つの反射光が2光束CPSの共焦点開口部を通過する。第1測定光束および第2測定光束にそれぞれ起因する第1測定および第2測定を含んだ少なくとも1の測定セットを実行する。様々な位置での測定セットの実行のため、少なくとも第1表面領域を移動させる。各測定結果は、極めて良好な分解能(例えば、少なくとも10nmの分解能)で決定される。本センサ装置と動作方法は、干渉計または他の高額で複雑な構成要素を使わないで、高い分解能と精度を必要とする測定に適用できる。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
測距装置及び撮像装置
【課題】装置構成の複雑化を招くことなく、測距用撮像素子から出力される画像信号に含まれている暗電流ノイズを除去できるようにした測距装置を提供する。
【解決手段】
3つの撮像素子のうちの中央に位置する暗電流検出用撮像素子22bに光が入射しないように、該暗電流検出用撮像素子22bの周囲を覆って遮光する遮光部材25と、両側の測距用撮像素子22a,22cの撮像領域22a1,22c1から出力される画像信号、及び暗電流検出用撮像素子22bの撮像領域22b1から出力される暗電流ノイズ画像信号を取り込み、取り込んだ各画像信号から暗電流ノイズ画像信号を減算して、各画像信号に含まれている暗電流ノイズを除去する暗電流ノイズ除去部27を有し、測距演算部28は、暗電流ノイズ除去部27で暗電流ノイズが除去された画像信号に基づいて被写体までの距離を算出する。
(もっと読む)
ステレオカメラシステム及び該システムを備える車両
【課題】外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供する。
【解決手段】ステレオカメラシステム(100)は、第1カメラ(20a)、第2カメラ(20b)、及び、基台(30)からなるステレオカメラユニット(70)と、第1カメラ(20a)及び第2カメラ(20b)が出力する第1画像データ及び第2画像データの少なくとも一方に、位置補正処理を行う制御装置(40)とを備える。第1カメラ(20a)及び第2カメラ(20b)の視野に、ステレオカメラユニット(70)の一部がそれぞれ含まれ、制御装置(40)は、第1画像データ及び第2画像データに含まれるステレオカメラユニット(70)の一部の画像に対応するデータに基づいて位置補正処理を行う。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を考慮して視差算出に用いる画素を適切に選択する。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像に対し、視差算出の対象画像のサイズに応じて、視差算出画素を選択するための複数の処理から1つを決定する決定手段と、決定手段により決定された処理に基づき、対象画像から視差算出画素を選択する選択手段と、選択手段により選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する算出手段と、を備える。
(もっと読む)
101 - 120 / 645
[ Back to top ]