
Fターム[2F112FA45]の内容
Fターム[2F112FA45]に分類される特許
141 - 160 / 645
相関演算装置、相関演算方法、焦点検出装置および撮像装置

【課題】偏位量を求めるべき2つのデータ列間において、3点内挿法に用いる相関量を算出するために用いられるデータの端部に大きな変動がある場合においても、2つのデータ列間の偏位量を高精度に求める。
【解決手段】基本データ列{A(i)}および偏位データ列{B(i+k)}の間の相関量D(k)の極大値を与えるkがk=2である場合であって、基本データ列{A(i)}における整数iの範囲がi=4〜8であるとする。3点内挿法に用いる相関量D(k−1)、D(k+1)の算出の際に、極大を示す相関量D(k)の算出に用いた偏位データB(6)〜B(10)以外の偏位データB(5)、B(11)を除外して算出する。こうした3点内挿法により、特に大きな変動を有する偏位データB(11)の影響を受けずに、高精度かつ安定的に、極大相関量に対する偏位量を算出することができる。
(もっと読む)
対応点探索装置

【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
デプスカメラの互換性
奥行き画像コンシューマーと複数の異なる奥行き画像プロデューサーとの間の互換性が、奥行き画像コンシューマーとの互換性がないサポートされていないデプスカメラパラメーターを有する固有の奥行き画像を受信し、当該固有の奥行き画像を、奥行き画像コンシューマーと互換性のあるサポートされた仮想デプスカメラパラメーターを有する仮想的な奥行き画像へと変換することによって提供される。この仮想的な奥行き画像は奥行き画像コンシューマーへ出力される。  (もっと読む)
(もっと読む)
距離測定装置
【課題】外乱光が存在する測定環境においても、測定対象物におけるレーザ反射光の抽出を高速且つ高精度に実行可能な距離測定装置を提供する。
【解決手段】照射方向を変化させながら、測定対象物Wにスリット状のレーザ光を照射する照射装置2と、撮影方向を変化させながら、測定対象物Wで反射したレーザ光の反射光を撮影画像として取り込む撮像装置3と、照射装置2及び撮像装置3の動きを制御する制御装置4と、撮影画像に2値化処理及びラベリング処理を施した処理画像を作成する画像処理部5と、処理画像に含まれる反射光と外乱光とを区別するために用いられる所定の物理量を、ラベリングされた領域ごとに演算する物理量演算部6と、少なくとも2枚の処理画像を比較して、対応する領域の物理量の変化量を算出し、変化量が予め設定した閾値を超過している領域のデータを消去する外乱光消去部7と、を備えた距離測定装置1。
(もっと読む)
距離画像取得装置
【課題】可動部なしに深い被写体深度を実現可能な低コストで薄型の距離画像取得装置を提供できるようにする。
【解決手段】複数のレンズがアレイ配列されてなるレンズアレイと、前記複数のレンズのそれぞれにより結像される被写体の縮小像(個眼像)の集合である複眼像を撮像する撮像素子とからなる撮像ユニットを備え、前記レンズアレイを構成する複数のレンズを、各々曲率半径の異なる2以上のレンズペアで構成し、レンズペアとなる2つのレンズは同じ曲率半径とする。演算ユニットは、撮像素子で撮像された複眼像を個眼像に分離して、各レンズペアに対応する個眼像ペアの中から最も焦点の合った個眼像ペアを抽出し、該個眼像ペアを用いて視差検出を行って距離画像を取得する。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
撮像装置
【課題】撮像素子により撮像された遮光壁の輝度情報に基づいて、各レンズの位置を計算することで温度変化による影響を取り除いて、環境変動に強い撮像装置を提供する。
【解決手段】この撮像装置50は、被写体(図示せず)に対向する位置に配設され、複数のレンズ1a、1bをアレイ状に配列したレンズアレイ1と、レンズアレイ1の像面側に設けられ、複数のレンズにより結像された被写体の縮小像(以下、個眼像と呼ぶ)の集合である複眼像を撮像するCMOSセンサ(撮像素子)4と、CMOSセンサ4により撮像された複眼像を処理する演算器10と、レンズアレイ1を構成する隣接する各レンズ間での光線のクロストークを防止する遮光壁2と、を備えて構成されている。
(もっと読む)
距離測定装置及び距離測定方法
【課題】カメラの台数を増やさないように、2つの画像を比較して対応点を探索するための計算負荷が高くならないように、また基線長を延長する時にカメラの移動時間が長くならないようにすることによって、要求精度を満たす距離測定を短時間で効率的に行うことができる距離測定装置を低コストで提供すること。
【解決手段】本発明の距離測定装置は、物体を撮影する複数の撮像手段(10a,10b)と、
前記撮像手段のうち2つ以上の撮像手段からの画像により、物体までの距離を算出する距離計算手段(13)と、
前記撮像手段の位置を制御する位置制御手段(18)と、
前記距離計算手段により算出された距離によって、要求精度を達成するために必要な基線長を算出する基線長計算手段(15)と、
前記基線長計算手段が算出した基線長を記憶する基線長記憶手段(16)とを備えることである。
(もっと読む)
距離計測装置、距離計測方法、及びプログラム
【課題】テクスチャ情報の少ない被写体を高密度に距離計測することを目的とする。
【解決手段】光源から照射される光が投影光学系のレンズを透過する透過率を空間的に符号化する符号化素子を含む投影部と、投影部により光が投影された距離計測対象を撮像する撮像部と、撮像部により撮像された撮像画像と、予め定められた距離ごとに撮像部により予め撮像された複数のキャリブレーション画像との類似度を示す相関値を算出する算出部と、算出部により算出された相関値が最大となるキャリブレーション画像に対応する距離を距離計測対象までの距離として決定する決定部と、を備える。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 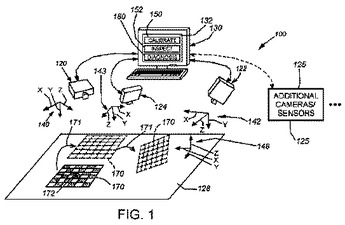 (もっと読む)
(もっと読む)
物体の改善されたステレオ画像を得る方法およびシステム
注目の物体のステレオ画像に関する改善された深さ精度を得る方法であって、
第1の位置から注目の物体の第1の画像を撮像すること、
第1の位置とは異なる第2の位置から注目の物体の第2の画像を撮像することを含み、
第1の画像および第2の画像に基づいて、注目の物体に関する深さの概略推定を求めること、
深さの概略推定に基づいて、注目の物体に関する改善された深さ精度に対応する改善された撮像位置のセットを求めること、
改善された撮像位置のセットから改善された画像を撮像すること、
改善された画像に基づいて改善された深さを求めること
を含む方法を開示する。
関連するシステムも説明している。  (もっと読む)
(もっと読む)
対象物特定システム、対象物特定装置、制御方法、及びプログラム
【課題】赤外線撮影手段が撮影した画像に基づいて対象物を特定すること。
【解決手段】対象物に設けられる赤外線放射体であって、赤外線放射量が異なる複数の領域を表面に有する赤外線放射体と、赤外線撮影手段300と電気的に接続された対象物特定装置110とを備え、対象物特定装置110は、赤外線撮影手段300が撮影した画像によって示される赤外線放射量の分布に、所定の異なる赤外線放射量の組合せの分布が含まれているか否かを判定する判定部114と、所定の異なる赤外線放射量の組合せの分布が含まれていると判定部114が判定した場合に、当該赤外線放射量の組合せのように赤外線を放射する複数の領域を表面に有する赤外線放射体が設けられている対象物を特定する対象物特定部115とを有する。
(もっと読む)
視認状況測定装置
【課題】ブルーミング等の影響を受け難くし、視認状況を示す測定結果をより高い精度で得る。
【解決手段】指標ユニット2は、発光可能な第1の領域と、該第1の領域から位置のずれた非発光の第2の領域と、前記第1の領域が発する光とは別の光幕取得用光を外部に照射し得る照射部と、を有する。カメラ1は、前記第1及び第2の領域を撮像する。処理装置3は、前記第1の領域の発光時に得られた画像に基づく前記第1の領域の輝度情報と、前記第1の領域の非発光時に得られた画像に基づく前記第1の領域の輝度情報と、光幕取得用光の照射時に得られた画像に基づく前記第2の領域の輝度情報と、光幕取得用光の非照射時に得られた画像に基づく前記第2の領域の輝度情報とに基づいて、視認状況を示す測定結果を得る。前記照射部は、光幕取得用光の直接光が前記撮像手段の視野内に到達しないように、光幕取得用光を照射する。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】 被対象物との距離と位置とを高精度測定できる三次元計測装置を得ること。
【解決手段】被対象物5を撮像素子14により撮像する撮像系10と、被対象物5と撮像系10との異なる距離毎に撮像された各画像により検知された輝度が予め定められ閾値以上の輝度であることにより被対象物5を検知する明点抽出部32と、画像の明点を中心とした複数の画素を含む一定領域ごとの輝度を検知し、該一定領域内の輝度分布を求めると共に、該輝度分布に基づいて輝度重心値を求める輝度重心の演算部36と、輝度重心値が検知された画素14aが有する輝度と、周囲の画素14aが検知した輝度とを、輝度重心値が有する輝度に補正した輝度補正値を得る輝度補正部38と、輝度補正値に基づいて被対象物5との距離値を求めると共に、輝度重心値に基づいて被対象物5の位置を検知する三次元検知部43と、を備えたものである。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
三次元画像を撮影するための方法
本発明は、重複する撮影領域を有する2つのカメラ(1a、1b)を用いて対象物の三次元画像を撮影するための方法に関し、較正プロセスの過程において、前記各カメラ(1a、1b)に対してそれぞれ、相互に属するエピポーラ線群を求める。予め設定されたランダム画像(40)を、撮影されるべき対象物(30)上に投影する。カメラの各ピクセルに対して、第1の周辺区域(13a)を特定し、属する第1のエピポーラ線(9a)を特定し、当該第1のエピポーラ線(9a)に対して、第2のカメラ(1b)の対応する第2のエピポーラ線(9b)を特定する。前記第2のエピポーラ線(9b)上に位置する、前記第2のカメラ(1b)の画像の全ピクセル(8b)に対して、第1の周辺区域に対して合同の第2の周辺区域(13b)を特定する。第1のおよび第2の周辺区域(13a、13b)の強度値を相互に比較し、一致度を形成する。一致度が最大である、第2のエピポーラ線(9b)上の画像位置(14)を特定する。事前に特定されている変換によって空間位置(17)を特定する。三次元画像は、このようにして求められた空間位置(17)を含む。  (もっと読む)
(もっと読む)
測距装置、測距方法、及びそのプログラム
【課題】被写体の測距の高精度化を図ることができる測距装置、測距方法、及びそのプログラムを提供する。
【解決手段】測距装置は、光を発光する光源と、前記光源により発光されて、被写体で反射された反射光を撮像する撮像部と、前記撮像部が撮像することにより得られた画素の画素値を、被写体までの距離を示す距離情報に変換する距離情報変換部と、前記距離情報に基づいて第1の撮像条件を設定する撮像条件設定部と、前記光源及び前記撮像部を制御して、前記第1の撮像条件で前記被写体を撮像させる撮像制御部と、を備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】車載単眼カメラを用いて、道路上にある案内看板や標識など対象物との距離を高精度に測定できる距離計測装置及び方法を提供する。
【解決手段】距離計測装置は、単眼カメラが撮影した異なるフレームの画像が入力され、その画像から対象物を検出する対象物検出部101と、対象物の2フレーム以上の画像を蓄積する対象物検出結果蓄積部102と、検出した対象物の画像上の長さまたは画素数などを算出する対象物スケール算出部103と、対象物の向きを対象物の特徴点から算出する対象物向き算出部104と、算出した対象物の向きおよび入力される車速センサーの車速情報に基づいて、車両が対象物に指向する速度を算出する対象物指向速度算出部105と、算出した対象物指向速度および算出した対象物の画像上のスケールに基づいて、対象物までの距離を計算し出力する対象物距離算出部106とを有する。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 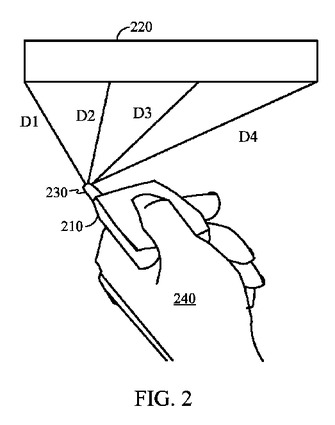 (もっと読む)
(もっと読む)
監視システム
【課題】距離測定用のセンサなど専用の装置を用いることなく、侵入者までの距離を測定可能なシステムを提供することを課題とする。
【解決手段】監視システム3は、監視装置1と監視カメラ2とを備える。監視カメラ2で撮像された画像から、監視装置1は距離画像を生成する。監視状態に入ると、監視装置1は、監視カメラ2で撮像された画像から侵入者を検出する。侵入者を検出すると、監視装置1は、次に、侵入者の画像上での接地位置を特定する。監視装置1は、接地位置を特定すると、あらかじめ生成されている距離画像上に接地位置を重ねることで、接地位置までの距離を特定する。
(もっと読む)
141 - 160 / 645
[ Back to top ]