
Fターム[2F129BB12]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 自然にあるもの (84)
Fターム[2F129BB12]の下位に属するFターム
Fターム[2F129BB12]に分類される特許
1 - 20 / 20
移動端末及び位置推定方法並びにコンピュータ読出可能記録媒体
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置と車両イベントを関係付けた参照データ群を格納している参照データデータベース92と、車両の推定自車位置から算定される誤差範囲と実車両イベントとに基づいて、実撮影画像から抽出された画像特徴点からなるマッチング用データに対するマッチング相手候補となる参照データを出力する参照データ出力部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
画像処理システム及び車両制御システム

【課題】高速道路だけでなく一般道を含め様々な車両走行路の走行中においても画像認識を用いて正確な自車位置検出が可能となる技術の構築。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。所定形状の道路区間において撮影した撮影画像及び当該撮影画像の撮影位置を入力するデータ入力部と、前記道路区間内の任意の地点を特定地点として、前記道路区間を通過するための前記特定地点での目標運動量を規定する目標運動量設定部と、前記特定地点での前記撮影画像から生成された被マッチングデータを、特定地点の位置及び特定地点における目標運動量と関係付けて、前記参照データとしてデータベース化する参照データデータベース化部とを備えている。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
風景マッチング用参照データ生成システム及び位置測位システム
【課題】多数のプローブカーから収集された撮影画像に基づき、風景画像マッチング用の効果的な参照用画像データを生成する。
【解決手段】推定自車位置を算定する機能を有する複数のプローブカーによって順次取得されたプローブデータから取り出された所定撮影位置領域の撮影画像の撮影位置の精度信頼度を評価して、この精度信頼度を撮影画像に付与し、所定度以上の精度信頼度を有する複数の撮影画像を処理対象撮影画像として選別し、各々の処理対象撮影画像の画像特徴点を抽出し、それらを統計処理して画像特徴点データを生成する。この画像特徴点データにこの画像特徴点データの元になった処理対象撮影画像の撮影位置を関係付けて、風景マッチングに利用される参照データが生成される
(もっと読む)
ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット
【課題】Hパラメータ推定の安定性を高めることができ、舗装路、砂利道、泥地、砂地、草原等の様々な帯域の模様をもつ平面領域を検出でき、撮影位置の変化による平面検出上の抜けを防ぐことができ、これにより、平面検出の安定性を高めることができるステレオカメラによる平面検出方法とこの方法を用いた移動ロボットを提供する。
【解決手段】異なる標準偏差を有する複数のLOGフィルタを設定し、最大の標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行し、最大の標準偏差による射影変換行列を動的に推定し(S101〜S104)、次いで、推定した射影変換行列を初期値として、順次小さい標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行して順次小さい標準偏差による射影変換行列を動的に推定し、これを最小の標準偏差を有するLOGフィルタまで繰り返して最終の射影変換行列を動的に推定する(S111〜S112)。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
ナビゲーション用の装置及び方法
本装置は、偏光フィルターセルのアレイであって、各セルが第一の偏光方向を有する第一の偏光フィルター及び第一の偏光方向とは異なる第二の偏光方向を有する第二の偏光フィルターを備えた、アレイと;偏光フィルターのアレイ上に光を向ける光学システムと;それぞれ第一及び第二の偏光フィルターを介して受光した光からデータを生成する第一及び第二の光センサーとを備える。また、本方法は、偏光フィルターセルのアレイ上に光を向けるステップであって、各セルが第一の偏光方向を有する第一の偏光フィルター及び第一の偏光方向とは異なる第二の偏光方向を有する第二の偏光フィルターを有する第二の偏光フィルターを有する、ステップと;それぞれ第一及び第二の光センサーによって第一及び第二の偏光フィルターを介して受光した光からデータを生成するステップと;データに基づいて偏光パターンを導出するステップとを備える。 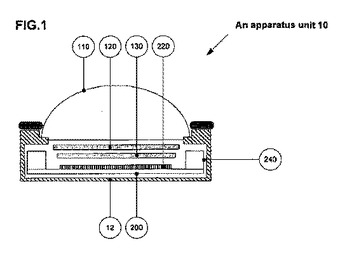 (もっと読む)
(もっと読む)
個人情報のジオコーディング
ジオコーディングされたユーザ情報を生成するためのコンピュータで実施される方法が開示される。この方法は、位置関係情報を有する入力項目について複数の異なるデータコーパスにまたがってユーザデータを探索するステップと、その位置関係情報に関する位置を決定するステップとを含む。この方法は、複数の異なるデータコーパスからの入力項目に関する、その決定された位置における、位置関係情報を有する入力項目の表現とともにモバイルデバイスの現在位置を示す地図を生成するステップをさらに含む。 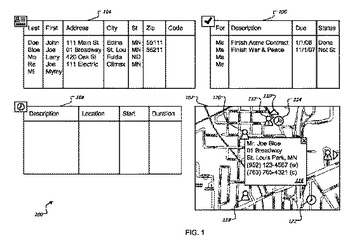 (もっと読む)
(もっと読む)
空間予測近似と半径方向の畳み込み積分
本発明は、三次元座標系に対する対象ポイントのロケーションを近似する為の方法を提供し、カメラの視界内に対象ポイントが入るよう対象ポイントへカメラの方向を合せるステップと、三次元座標系に対するロケーションと、カメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを検索するステップと、関連地形図データベースへ問合せ、カメラの向きに沿った地形図上に位置決めされている1以上の座標を識別し、第1のデータセットを形成するステップと、カメラの向き及びカメラのチルトに基づき、カメラと対象ポイントとの間の半径方向平面上に位置決めされている1以上の座標を計算し、第2のデータセットを形成するステップと、第1のデータセットと第2のデータセットとを比較し一致する座標対を識別するステップとを含み、一致する座標が対象ポイントの三次元座標位置を表す。本方法を実行する為のシステム及びソフトウェアも提供する。  (もっと読む)
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
ナビゲーション装置
【課題】従来のナビゲーション装置では、ルート案内中にモニタ画面に表示される交差点拡大図が小さいので、視認性が悪かった。
【解決手段】交差点Kに近づくにつれて表示器に表示されている交差点拡大図の画面占有率が変化していくので、自車両Jから交差点Kまでの距離、ならびに交差点Kへの接近状況を瞬時に視認することができる。
(もっと読む)
移動量計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】案内処理を、運転者の感覚に適合し、的確且つ正確なものとすることが可能なナビゲーション装置を提供する。
【解決手段】 自車位置情報と前記案内ルートとの関係に基づいて、案内処理手段が前記案内ルートに従った案内を実行するナビゲーション装置を構成するに、第一自車位置情報を取得する第一自車位置情報取得手段2と、精度の高い第二自車位置情報を取得する第二自車位置情報取得手段3とを備え、案内に使用する自車位置情報である案内自車位置情報を決定する自車位置決定手段7を備え、案内自車位置情報の精度が予め設定された基準精度より低い場合に、案内処理手段8による案内処理の状態変更を保留し、基準精度より高くなった場合に案内処理を開始する構成とする。
(もっと読む)
異なるソースの位置データをマッチングさせるためのコンピュータ装置及び方法
コンピュータ装置は、プロセッサ(11)とメモリ(12,13,14,15)とを有する。メモリ(12,13,14,15)は、コンピュータプログラムと、第1のソースに由来し、オブジェクト位置データを含む、オブジェクトのデータと、第2のソース(3(j))に由来し、オブジェクトに関連するレーザサンプルのサブセットを含み、それぞれのレーザサンプルについてのレーザサンプル位置データを含む、レーザサンプルとを格納する。プロセッサ(11)は、オブジェクト位置データと、レーザサンプルのサブセットのレーザサンプル位置データとを比較し、比較に基づいて、オブジェクト位置データを、レーザサンプルのサブセットのレーザサンプル位置データにマッチングさせ、第1のソースと第2のソースとの間で位置データの相対的位置誤差を修正する。オブジェクトは、建築物ファサードであってもよい。  (もっと読む)
(もっと読む)
画像における対象物を認識する方法および画像認識デバイス
【課題】画像における対象物を認識する方法を提供すること。
【解決手段】画像における対象物を認識する方法であって、該方法は、該画像に対応する画像データを抽出するステップと、デジタルマップ情報を抽出するステップであって、該デジタルマップ情報は、該画像によって表されたエリアの少なくとも一部についてのマップ情報を含み、該デジタルマップ情報は、該対象物についての情報を含む、ステップと、該画像データおよびデジタルマップ情報を評価することによって該対象物を認識するステップであって、該画像データおよび該デジタルマップ情報の両方は、該対象物を認識するために評価される、ステップとを包含する、方法。
(もっと読む)
自己位置推定プログラム、自己位置推定方法および自己位置推定装置
【課題】自己位置推定精度を向上させること。
【解決手段】入力画像に含まれる複数のランドマーク間ごとに、各ランドマーク間の最遠距離および最近距離から、各ランドマーク間の挟角の最大値を示す最大挟角および当該挟角の最小値を示す最小挟角を算出し、算出された最大挟角および最小挟角それぞれに基づいて、最大狭角から定まる最大狭角拘束円および最小狭角から定まる最小狭角拘束円を算出し、複数のランドマーク間ごとに、算出された最大挟角拘束円および最小挟角拘束円で包囲される領域に、最大挟角と最小挟角との間で各角度における狭角としての尤度を規定した尤度モデルを適用して、領域内の座標位置ごとに自己位置としての可能性を示すスコアを算出し、複数のランドマーク間ごとに算出されたスコアを座標位置ごとに加算し、算出されて加算されたスコアに基づいて、スコアが最大となる座標位置を自己位置として推定する。
(もっと読む)
ジャイロを搭載するロボット、ジャイロ較正装置、プログラム及び方法
ジャイロを搭載するロボットにおいて較正を行うとき、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定する。その測定された位置を初期値として取得し(S10,S12)、較正が開始することを表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間はジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。  (もっと読む)
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
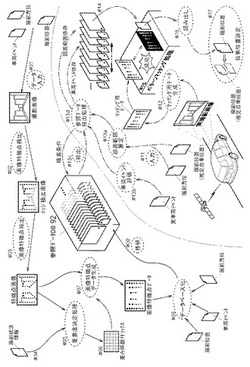
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 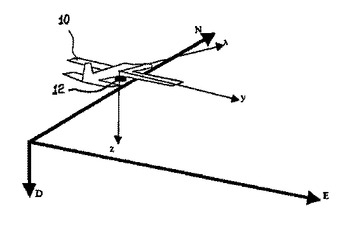 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
1 - 20 / 20
[ Back to top ]