
Fターム[2F129BB20]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 速度センサ (4,676)
Fターム[2F129BB20]に分類される特許
2,501 - 2,520 / 4,676
車載システム及び運転支援方法
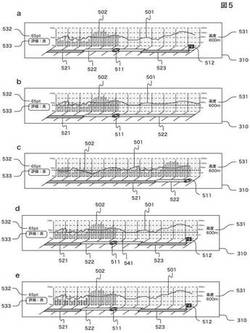
【課題】ユーザが走行道路の勾配との関係において、自己の運転の低環境負荷度の評価値を認識できる「車載システム及び運転支援方法」を提供する。
【解決手段】評価ポイントグラフ502の縦軸は評価ポイントとし横軸は道程距離とする。また、標高グラフ501の縦軸は標高とし横軸は道程距離とする。そして、評価ポイントグラフ502と標高グラフ501の横軸は一つの横軸を共有させる。そして、当該横軸の原点を横軸の中心に設定し、横軸の原点より左側の領域、すなわち、道程距離が負となる領域には、標高グラフ501として過去に走行した各地点の標高を表す折れ線グラフを描画すると共に、評価ポイントグラフ502として過去に走行した各地点で算出した評価ポイントを表す棒グラフを描画する。
(もっと読む)
車両ナビゲーション装置

【課題】車両現在位置を精度良く表示する。
【解決手段】車両ナビゲーション装置1は、車両の旋回開始・終了が行われると、地図データに基づいて車両現在位置に適合するリンクを車両走行軌跡に基づいた誤差範囲内で探索し、車両現在位置に適合するリンクが存在すると、車両現在位置を当該車両現在位置に適合するリンク上に引込み制御し、この後に、車両が施設内に進入した旨を判定すると、引込み制御した車両現在位置を当該引込み制御する直前の位置に戻して後段の処理を行う。これ以降、引込み制御した直後の車両現在位置を基点とするのではなく引込み制御する直前の車両現在位置を基点として後段の処理を行うことになり、車両現在位置を精度良く表示する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路にしたがって走行するための車線変更を容易にするナビゲーション装置を提供する。
【解決手段】現在地検出装置を用いて、車両の現在地を検出する。走行車線検出装置を用いて、車両が走行している車線を検出する。車両の現在地、推奨経路および地図データに基づいて、車両が次に進行する分岐点を検出する。車両が、そのまま走行車線を走行して、推奨経路にしたがって分岐点を通過できない場合は、DVD−ROMに記憶された統計交通情報に基づいて、推奨経路上の分岐点の先では渋滞が発生しているか否かを判定する。分岐点の先で渋滞が発生している場合は、分岐点の先で渋滞が発生していない場合に比べて、車線変更の指示を行うための基準となる所定距離を長くする。検出した分岐点から所定距離以内の位置に車両は到達すると、車線変更を指示する音声がスピーカから出力される。
(もっと読む)
交通情報作成方法、交通情報作成装置及びナビゲーションシステム
【課題】信号等の渋滞以外の要因による速度低下を除去して精度のよい交通情報を作成する交通情報作成方法、交通情報作成装置及びナビゲーションシステムを提供すること。
【解決手段】所定距離毎又は所定時間毎に車速を検出し、規定車速以上の前記車速が所定距離以上連続して検出された場合に、車速に対応した渋滞度情報をリンク毎に作成する交通情報作成方法であって、リンク長が所定範囲内の場合、連結渋滞判定手段32が、始端起点距離以内で最も速い車速に対応した渋滞度情報を当該リンクに割り当てる、ことを特徴とする。
(もっと読む)
車両用操作装置及び車両用操作プログラム
【課題】車両の運転中における操作の安全性を向上させる。
【解決手段】上下左右の方向を指示するためのスクロールスイッチを押下する手動操作が運転者により行われると(S101:YES)、その操作内容に従い、ディスプレイに表示されている選択対象の複数の項目において暫定的な選択状態にある項目を変更し(S102)、選択状態となって項目の内容を音声出力する(S103)。また、決定ボタンを押下する手動操作が運転者により行われると(S104:YES)、選択状態にある項目の内容を音声出力し(S105)、これに対して完了ボタンを押下する手動操作が行われると(S107:YES)、その項目を選択項目として決定する(S108)。
(もっと読む)
ナビゲーション装置およびナビゲーション装置用のプログラム
【課題】路面品質の良好な道路を優先的に誘導経路とするナビゲーション装置において、路面品質の情報として、誘導経路の計算の時点に適したものを用いることができるようにする。
【解決手段】車両用ナビゲーション装置が、複数のリンクのそれぞれについて、時期と当該時期における当該道路の路面品質との対応関係を示す路面品質データを地図データ取得部から読み出し、読み出した路面品質データの内容に基づいて、当該複数の道路の現在における路面品質を特定する。そして車両用ナビゲーション装置1は、特定した現在の路面品質に基づいて、路面品質が低い道路よりも高い道路の方がより誘導経路として採用されやすくなるような方法で、誘導経路を決定する。
(もっと読む)
ナビゲーション装置
【課題】ユーザのニーズに対してより必要充分な範囲内において、サーバから詳細な地図を取得する「ナビゲーション装置」を提供する。
【解決手段】各区域の詳細地図データの地図データ提供システム3の詳細地図データベース31における蓄積の有無を示す詳細地図データ有無情報を予め記憶装置11に格納する。誘導経路設定時に、詳細地図データ有無情報を参照して、目的地周辺の区域や誘導経路の周辺の道路網が複雑な区域であって、詳細地図データが詳細地図データベース31に格納されている区域を取得提案区域に設定する。そして、各取得提案区域を地図画像401上で表示し、各取得提案区域の詳細地図データ取得の要否の指示をユーザから受付け、取得を指示された取得提案区域の詳細地図データを、地図データ提供システム3の詳細地図データベース31からダウンロードし、記憶装置11に格納する。
(もっと読む)
ナビゲーション装置
【課題】車両が旋回走行をしている場合に、算出したピッチ傾斜角の信頼性が低いため、自車位置精度が劣化する。
【解決手段】車両の方位を検出する方位検出手段と、車両の前後方向の加速度を検出する加速度検出手段と、車両の移動距離を検出する移動距離検出手段と、移動距離検出手段の出力に基づいて車両の速度を算出する速度算出手段と、速度算出手段の出力に基づいて車両の加速度を算出する加速度算出手段と、加速度算出手段から出力された車両の加速度と加速度検出手段の出力に基づいて車両のピッチ傾斜角を算出するピッチ傾斜角算出手段と、方位検出手段の出力および速度算出手段で算出された車両の速度に基づいて車両の求心加速度を算出する求心加速度算出手段と、求心加速度算出手段の出力に基づいてピッチ傾斜角算出手段によって算出された車両のピッチ傾斜角の信頼性を判定するピッチ傾斜角信頼性判定手段を備える。
(もっと読む)
車載用ハンズフリー通話装置および車載用ハンズフリー通話装置の制御方法
【課題】運転手の注意力が散漫になるのを抑制すること、あるいは、運転手の注意力が散漫になっても安全性を高めることが可能な車載用ハンズフリー通話装置を提供すること。
【解決手段】車両に搭載され、音声通信端末2と音声信号のやりとりを行う車載用ハンズフリー通話装置1は、音声を入力するための音声入力手段15と、音声を出力するための音声出力手段16と、音声通信端末2を介したハンズフリー通話中であるか否かを判断する通話判断手段23と、通話判断手段23での判断結果に基づいて車載用ハンズフリー通話装置1を制御する機器制御手段25とを備えている。
(もっと読む)
地点登録装置
【課題】簡易な操作で信頼性の高い地点登録が可能な地点登録装置を提供する。
【解決手段】時刻経過に伴う自装置の位置変化に基づいて自装置の停止時間を算出する停止時間計算部6と、停止時間に応じて対象地点に関する登録処理の可否を判断する登録判断部7と、停止時間に対応付けて地点の位置及びこの地点に関する予備情報を地点情報として記憶する地点情報記憶部3と、登録地点の地点情報を記憶するユーザ登録地点記憶部10と、地点情報記憶部3を検索して、登録判断部7により登録可と判断された対象地点から所定範囲内に存在する地点の地点情報を読み出すとともに、読み出された地点情報のうち、対象地点の停止時間に対応する予備情報を有する地点を登録候補として抽出する訪問地点検索部8と、登録候補から選択された地点の地点情報をユーザ登録情報記憶部10に登録する登録実行部9とを備える。
(もっと読む)
レンジ測定デバイス
【課題】レンジ測定デバイスを開示する。
【解決手段】デバイスは、第1時刻に第1レーザ・パルスを生成するように構成されたフラッシュ・レーザ・レーダを備える。デバイスは、第2時刻に、360度視野内の少なくとも1つの物体から第1レーザ・パルスの反射を受け取る。デバイスは、タイミング・エレクトロニクス・モジュールと、タイミング・エレクトロニクス・モジュールと通信するイメージ・センサと、イメージ・センサとレーザ・レーダとの間に結合されたミラー素子と、レンズとを更に備える。ミラー素子は、第1レーザ・パルスの反射を360度視野の少なくとも一部へ分散させるように構成された第1反射器と、少なくとも1つの物体からイメージ・センサ内へ第1レーザ・パルスの戻り反射を集めるように構成された第2反射器とを含む。レンズは、戻り反射をイメージ・センサへ集めるように構成される。
(もっと読む)
速度監視装置、その制御方法及び制御プログラム
【課題】ナビゲーション装置が逐次監視している車速の変化について、道路の勾配すなわち傾斜角との関係において安全のための判定値をもとに監視及び運転者に警告すると共に、その判定値を運転者白身で変更可能とすることにより、定速走行による安全運転を効果的に支援する。
【解決手段】勾配算出手段21は、加速度センサ1により逐次検出される加速度を用いて走行中の道路の勾配を算出する。車速算出手段22は、車速を算出する。上記のように算出される勾配と車速とに関し、判定値設定手段23は、車速の監視及び警告に用いる安全のための判定値を設定し、このように設定する判定値について、設定変更手段24が変更を受け付ける。この判定値は、勾配及び速度変動の各基準値を含み、これら各基準値をもとに、所定以上の勾配において、所定以上の速度変動を判定及び報知する手段が、勾配判定手段25及び車速判定手段26である。
(もっと読む)
ナビゲーション装置、その制御方法及び制御プログラム
【課題】目的地までの経路探索における経路の終端とすべき道路リンクの選定において、有料道路のインターチェンジ間の区間など、他の道路や道路外施設との往来が制限されている道路リンクを目的リンクの候補から除外すべきかどうかの判断を適切に行うことにより、的確な経路案内を行うことができるナビゲーション装置、その制御方法及び制御プログラムを提供する。
【解決手段】経路計算部32の経路計算において、道路リンク読出部32aが目的地近傍の道路リンクを読出す。そして、この読み出した複数の道路リンクのそれぞれについて、隔離道路判定部32dが当該道路リンクが隔離道路か否か、つまり目的リンクとして設定できるか否かの判断を行う。隔離道路判定部32dは、目的地に対する距離が当該目的リンク候補よりも短い道路リンクに対して、当該道路リンクが隔離道路か否かの判断を行う。
(もっと読む)
車両の走行制御装置
【課題】 GPSによる自車両の測位精度を保ったまま自車両の走行制御を行うことができる車両の走行制御装置を提供する。
【解決手段】 走行制御装置1は、走行経路設定部10を有する走行制御ECU2と、複数のGPS衛星からの電波を受信するGPS受信機3とを備えている。走行経路設定部10は、GPS受信機3の受信信号に基づいて、自車両の現在位置を特定すると共に各GPS衛星の配置状況の情報を取得し、目的地までの走行経路候補に対して、GPS衛星が周辺構造物に遮蔽される領域(衛星遮蔽領域)を表す衛星遮蔽領域マップを作成する。そして、走行経路設定部10は、その衛星遮蔽領域マップを用いて、目的地までの走行経路候補のうちGPS衛星の捕捉状態が最も良好であると推定される走行経路候補を自車両の走行経路として選定する。
(もっと読む)
施設検索装置
【課題】施設検索により検索された施設について各施設の利用客による評価を認識できるようにする。
【解決手段】各施設の利用客による利用施設に関する評価を集計したデータベース20aを有する情報収集装置20と通信する通信装置10と、データベース20aに集計された利用施設に関する評価に基づいて施設検索により検索された施設に対して利用施設の評価の高い施設ほど順位が高くなるように優先順位を特定し(S202、S204)、施設検索により検索された施設に優先順位を付加して表示装置に表示させる(S206)。
(もっと読む)
移動体用測位装置
【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
ナビゲーション装置、その案内表示方法
【課題】経由地または目的地設定において、ユーザの手間を省くことにある。
【解決手段】現在位置を算出する機能を備えたナビゲーション装置であって、観光地エリアと観光地エリアに存在するお勧め地点とを含む観光地情報を記憶する記憶手段と、目的地の指定を受け付ける目的地指定受付手段と、現在位置が観光地エリア内に存在し、かつ目的地指定受付手段により指定を受け付けた目的地が現在位置が存在する観光地エリアの外の地点(例えば、自宅)である場合に、観光地情報を用いて、現在位置が存在する観光地エリアに存在するお勧め地点を検索するお勧め地点検索手段と、お勧め地点検索手段により検索されたお勧め地点を表示する表示手段と、を備える。
(もっと読む)
画像表示制御装置及び画像表示制御システム
【課題】要安全確認対象物を容易に認識できるとともに、自車両と要安全確認対象物との位置関係を容易に把握できる画像表示制御装置及び画像表示制御システムを提供すること。
【解決手段】画像表示制御装置5では、ステップ100にて、電子カメラ11で撮影された画像の撮像データを取り込む。続くステップ110では、レーダ13により検出された対象物との距離のデータ(測距データ)を取り込む。続くステップ120では、車速センサ15や操舵角センサ17から得られた自車の車両情報を取り込む。続くステップ130では、自車線走行領域の算出を行う。続くステップ140では、歩行者や車両等の障害物の検出を行う。続くステップ150では、ディスプレイ3に表示する表示画像を算出する。続くステップ160では、前記ステップ150にて算出された画像データに基づく画像を、ディスプレイ3に表示する。
(もっと読む)
ナビゲーションシステム、経路探索方法および端末装置
【課題】経路探索を行わなかった区間に関して、さらに最適な経路がある場合はその旨を提示できるようにして、最適な別経路の存在を報知できるようにする。
【解決手段】経路探索をすることなく交通機関を利用した任意の出発点から到着点までの経路の出発点と到着点およびその間の移動経路を経路ごとに記憶する経路履歴記憶手段58と、前記経路履歴記憶手段58に記憶された移動経路から出発点と到着点を抽出する地点抽出手段59と、を備え、比較経路探索指示手段62から比較経路探索指示があった場合、地点抽出手段59は、経路履歴記憶手段58に記憶された経路履歴から出発点と到着点を抽出し、経路探索手段52は地図データを参照して抽出された出発点と到着点との間の最適経路を案内経路として探索し、経路比較手段60は該当する経路履歴と前記案内経路とを比較し、案内経路が経路履歴より有利な経路である場合、当該案内経路の存在を報知する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、目的地誘導システム
【課題】移動体と車両がより早く出会うように的確に経路誘導を行う。
【解決手段】ナビゲーション装置1は、外部の携帯端末2の位置情報を受信する通信処理部110と、前記受信した位置情報を目的地として設定する目的地設定部104と、自車両の位置情報を算出する自車両位置算出部102と、前記自車両位置から前記目的地までの経路情報を算出する経路算出部106と、前記目的地と前記自車両の位置情報と前記経路情報と地図情報とを用いて、経路誘導を行うナビゲーション処理部100と、前記ナビゲーション処理の結果を表示装置に出力する表示処理部114と、を有し、前記通信処理部110は、前記自車両の位置情報と前記経路情報とを前記携帯端末2に送信する。
(もっと読む)
2,501 - 2,520 / 4,676
[ Back to top ]