
Fターム[2F129BB35]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 距離係数 (34)
Fターム[2F129BB35]に分類される特許
21 - 34 / 34
変換係数の導出方法およびナビゲーション装置

【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
ナビゲーション装置、方法及びプログラム

【課題】ナビゲーション装置の技術において、容易かつ高精度に距離係数を補正すること。
【解決手段】道路設定手段20が、距離係数の補正に用いる道路である特定道路ごとに、開始地点と終了地点の位置座標並びに両地点間の本来の道路長について情報設定を受け付け、その情報を、記憶手段30の高精度距離情報データベース35に記憶させる。走行中には、判断手段45が特定道路の各端点すなわち開始地点及び終了地点について、自車位置到達を判断し、それに基づいて距離算出手段25が、特定道路の前記開始地点と前記終了地点の間について、前記距離係数に基づく走行長を算出する。補正手段40が、高精度距離情報データベース35に記憶されている前記道路長と、距離算出手段25で算出した前記走行長と、に基づいて、距離係数を補正する。
(もっと読む)
位置検出装置及び位置検出方法
【目的】GPS出力データの各成分について信頼度の有無及び誤差指標に基づいて補正処理を行って位置決定精度を向上する「位置検出装置及び位置検出方法」を提供することである。
【構成】GPSの測位周期で該GPSにより測定される車両の各方向位置成分データ及び速度成分データを用いて自律航法による位置計算結果及び該自律航法の位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角を補正する補正処理を行い、GPSにより測定される車両の各方向の位置成分データ及び速度成分データの信頼度を判定すると共に、信頼度ありと判定された成分の誤差指標を算出し、信頼度が無いと判定された測定成分の補正処理における貢献度を零あるいは略零にし、信頼度有りと判定された測定成分の補正処理における貢献度を誤差指標の大きさに応じて小さくする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及び、ナビゲーションプログラム
【課題】自車の走行車線を考慮した上で、最適な経路を提供することのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、道路データに基づいて目的地までの最適な経路案内を行うナビゲーション装置であって、自車位置及び速度を検出する測位部と、前記測位部により検出した自車位置から自車の走行車線を特定する車線判定部と、道路データに基づいて、目的地までの最適な経路コストを有する第一経路と、前記車線判定部により特定した自車の走行車線を考慮した第二経路とを探索する経路探索部と、前記車線判定部によって特定した走行車線と、前記自車位置とに基づいて修正された経路コストについて、前記第一経路と前記第二経路との評価を行う経路評価部と、前記第一経路又は第二経路のうち、少なくとも評価が高い方の経路を表示する経路表示部とを備える。
(もっと読む)
距離変換情報生成装置、車載装置及び距離変換情報生成方法
【課題】車輪の回転に応じて生成される走行信号と車両の走行距離とを関連付ける距離変換情報を精度良く生成することができる距離変換情報生成装置、車載装置及び距離変換情報生成方法を提供する。
【解決手段】車載装置30は、光ビーコン10との通信により領域Aの交信地点(所定の地点)を通過した際に、領域Aを通過することを示す信号及び光ビーコン10との交信地点と路上装置20との交信地点との間の区間距離を受信し、信号を受信した時点から、車輪の回転に比例して生成されるパルス信号のパルス数の計数を開始する。車載装置30が、車両が領域Bを通過することを示す信号を路上装置20から受信した時点で、区間距離を計数したパルス数で除算して、距離変換係数を算出する。
(もっと読む)
車載装置、及び、走行距離補正方法
【課題】 ある程度の距離を走行しなくても、走行距離の誤差を補正することの可能な技術を提供する。
【解決手段】 カメラにより撮影された画像データから、高速道路上の路面に描かれた点線間を走行する間の車輪の回転数、又は、高速道路のキロポスト間を走行する間の車軸の回転数を取得し、取得した車輪の回転数から、車両の走行距離を補正する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を迅速に得ることができる補正係数演算装置を得る。
【解決手段】距離補正係数の演算に使用する2つのGPS情報であるGPS情報対に関し、移動距離に基づく評価を実行し、移動距離が大きい情報ほど演算に使用する頻度を高くする。
(もっと読む)
測位装置または測位方法
【課題】スリップに起因する車輪速センサ部計測値の位置更新誤差を補正し、移動体の位置更新を高精度に行うことができる測位装置および方法を提供する
【解決手段】GPS受信装置2からの測位結果により移動体の位置更新が可能な場合に、車輪速センサ1と前記受信装置2から得られる情報により、スリップ比Srと前記センサの情報から求めた加速度Awの関係を求めておく。前記受信装置2からの測位結果により移動体の位置更新が不可能な場合に、求めた加速度Aw’に応じたスリップ比Srを上記関係から算出する。このスリップ比Srを用いて車輪速センサ部計測値の補正を行い、この補正値を用いて位置更新を行うことで、移動体の位置更新精度を向上させることができる。
(もっと読む)
歩行者の動態検知装置
【課題】
上下移動を伴う歩行動態を正確に認識できる装置がなかった。また、上下移動を伴う歩行動態では、平面歩行とは異なる歩幅で歩く事になるがそれを検知する装置がなかった。
【解決手段】
高度変化を検知するセンサと平面での歩行動態を検知する装置を組合せ上下移動を考慮した歩行動態を検知する。
【効果】
本発明によれば、上下移動を伴うような歩行動態が認識できるようになる。さらに、歩幅を正確に検知できるようになり精度の高い位置検知が可能になる。また、歩行動態と地理情報を比較して地理上のどこにいるかを推定できるようになる。
(もっと読む)
車速検出装置及びナビゲーション装置
【課題】車速パルス信号の1パルス当たりの移動距離の如何に関わらずに、チャタリングの除去とパルスの計数を適正に行うことのできる「車速検出装置及びナビゲーション装置」を提供する。
【解決手段】車速変換部13は、車速パルスの単位時間当たりのパルス数に、距離変換係数を乗じて車速を算出する。制御部109は、車速変換部13が算出した車速とGPS受信機103が測定した車速に応じて、距離変換係数の大きさを定める距離補正係数の適正値を推定し、推定した適正値に距離補正係数を更新する処理を繰り返し行う。また、制御部109は、距離補正係数を更新したならば、マスク時間を、距離変換係数が大きいほど大きくなるように設定する。そして、チャタリング除去部14は、車速パルス信号のマスク時間内の信号レベル変化をマスクすることにより、車速パルス信号に生じるチャタリングを除去し、車速変換部13に出力する。
(もっと読む)
自車位置算出装置およびその算出方法
【課題】 走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる「自車位置算出装置およびその算出方法」を提供する。
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
(もっと読む)
現在位置検出装置
【課題】 路面温度を予測し、より正確に走行距離を補正する。
【解決手段】 車両の走行距離に対する車速パルスの距離係数を学習し、学習した距離係数を用いて車両の現在位置を検出する現在位置検出装置(1)において、外気温度、日射状態、降雨状態のパラメータのうち少なくとも2つのパラメータに基づいて路面温度を算出する路面温度算出手段(13)と、算出した路面温度に基づいて距離係数を補正する距離係数補正手段(12)と、補正した距離係数を用いて走行距離を算出する走行距離算出手段(14)とを備えたものである。
(もっと読む)
歩行者ナビゲーション装置、歩行者ナビゲーション方法及びプログラム
本発明の歩行者ナビゲーション装置(10A)は、現在位置情報をGPS(20)から獲得する位置情報受信部(12)と、受信した現在位置情報を解析して現在位置を算出する位置情報解析部(13)と、地図情報を記憶するMAPDB(14)と、マルチパスの影響を制御するためのマルチパス制御距離を指定するマルチパス制御部(17)と、位置情報解析部(13)で算出した現在位置と、MAPDB(14)に記憶されている地図情報と、マルチパス制御部(17)で指定されたマルチパス制御距離とに基づいて、現在位置表示情報を算出する中央処理部(11)と、現在位置表示情報を表示する表示部(15)と、距離指定値や経路検索条件の入力及びナビゲーション開始指示を行う入力部(16)と、を備える。 これにより、マルチパスの影響を適宜補正して正確に歩行者の経路をナビゲーションすることができる歩行者ナビゲーション装置を提供する。 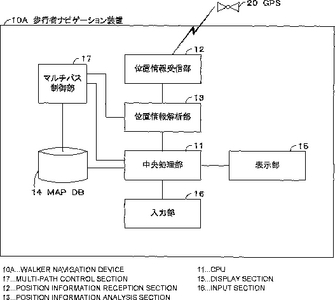 (もっと読む)
(もっと読む)
21 - 34 / 34
[ Back to top ]