
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
521 - 529 / 529
位置測位装置を有する移動体情報端末
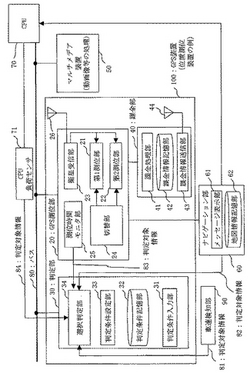
【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
親局制御運行支援及び管理方法、移動体の位置決め方法

【課題】移動体の詳細な位置決めと、運行支援・管理機能の向上・効率化をはかる。
【解決手段】親局に地図情報を格納し、子局の衛星信号受信機構127、ジャイロスコープ129からの衛星信号及びジャイロ情報を親局やへ送る。親局では、衛星信号から当該移動体の大まかな位置を検出し、地図と合わせて正確な初期位置を決め、その後はその位置とジャイロ情報とから時系列的に地図上の位置を定め、それを子局へ送る。更に親局では各子局の各時点の位置から道路等に関する情報を収集し、これに基づく道路等の情報を子局へ送信する。
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 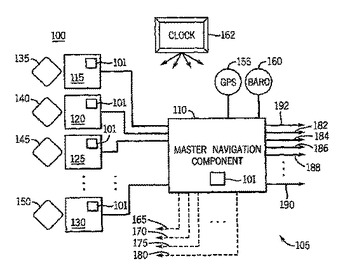 (もっと読む)
(もっと読む)
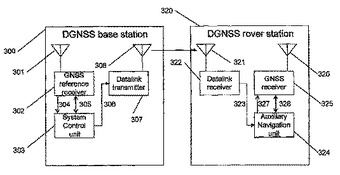
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
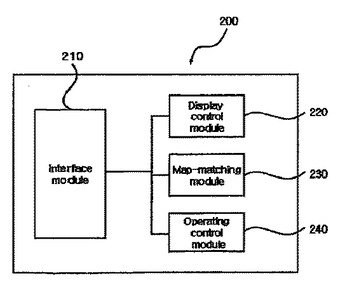
マップマッチング強制離脱命令によって経路再探索を可能にするナビゲーション用地図表示方法および地図表示システム
本発明は、地図データ上にマッピングされるユーザ位置と実際のユーザ位置に差がある場合、マップマッチング誤差を有する地図情報サービスの提供を能動的に遮断することができるナビゲーション用地図表示方法および地図表示システムに関し、本発明の一実施例によるナビゲーション用移動通信端末機で地図を表示する方法は、所定のGPS受信機から前記移動通信端末機のGPS座標データを受信する段階と、前記移動通信端末機の格納手段に格納された地図データを所定のディスプレイ手段に表示する段階と、前記GPS座標データおよび前記地図データを参照し、前記地図データ上の前記移動通信端末機の位置を前記ディスプレイ手段にマップマッチングして表示する段階と、ユーザからマップマッチング強制離脱命令を受信し、前記マップマッチング強制離脱命令に応答して前記移動通信端末機をマップマッチング待機状態で制御する段階とを含む。本発明によると、地図情報提供時、地図データ上のユーザ位置と実際のユーザの位置に差がある場合、マップマッチング誤差を有する地図情報サービスの提供を能動的に遮断することができるナビゲーション用地図表示方法および地図表示システムを提供することができるという利点がある。
 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 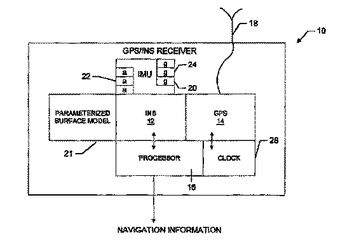 (もっと読む)
(もっと読む)
521 - 529 / 529
[ Back to top ]