
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
401 - 420 / 529
搬送波位相式測位装置
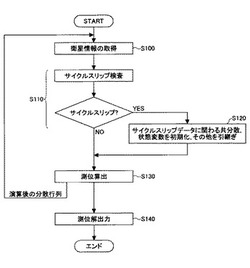
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
位置検出装置及び位置検出方法

【課題】サイクルスリップ等が発生した場合に対して、整数値バイアスの確定処理を一からやり直す必要を無くすこと。
【解決手段】本発明による位置検出装置は、移動局が所定周期毎に観測する衛星信号の搬送波位相の積算値に含まれる整数値バイアスを推定して移動局の位置を検出する位置検出装置であって、整数値バイアスの推定に用いる共分散行列を、前回周期で導出した各衛星に係る共分散を用いて更新し、今回周期で新たな衛星が観測可能となった場合、前記共分散行列に、該新たな衛星に係る共分散として所定の初期値を追加することを特徴とする。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
ナビゲーション装置
【課題】TTS再生によって通知されるべき情報を、TTS再生によってユーザに迅速に通知することができるナビゲーション装置20を提供する。
【解決手段】本発明のナビゲーション装置20は、次にTTS再生されるべきデータについて、当該データのTTS再生にかかる時間であるTTS再生時間を算出し、算出したTTS再生時間が、次に音声ガイダンスが再生される地点を通過するまでの所要時間以上である場合に、当該データのTTS再生速度を速め、再生速度を速めた場合のTTS再生時間が前記所要時間未満であるならば、速めた速度でデータのTTS再生を実行する。
(もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、位置判断測定の誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間(または、その時間の前後を含む時間)における選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
車両位置補正装置及び車両位置補正方法
【目的】前後方向の距離誤差(前後ズレ)を小さくでき、しかも、マップマッチング処理により急激な位置飛びが発生しないようにする「車両位置補正装置及び車両位置補正方法」を提供することである。
【構成】自立航法により測定した車両の測定位置とGPS測定法により測定した車両の測定位置とを用いて車両位置を補正する際、自立航法にる測定位置から車両方位方向に延長した直線にGPS測定位置から垂線を下ろし、該自立航法測定位置と前記垂線の足を結ぶ距離Dを算出する。しかる後、自立航法測定位置を、車両方位方向に距離Dの所定割合分シフトして得られた位置を車両位置とし、該車両位置を道路リンク上にマップマッチングする。
(もっと読む)
車両用表示システム、ナビゲーションシステム
【課題】自車両と周囲の状況を把握容易に表示する現在位置表示システムを提供すること。
【解決手段】撮影手段を備えた路側装置から所定の撮影範囲の元画像を車両に送信する現在位置表示システムであって、車両は、該車両の位置を検出する位置検出手段14aと、道路地図を記憶した道路地図記憶手段15と、位置を含む道路地図を地図記憶手段から抽出して該車両の位置を示すマークと共に表示装置に表示する道路地図表示手段14dと、元画像を路面に略垂直な視点の平面画像に視点変換する画像変換手段14bと、平面画像を道路地図における前記撮影範囲に重畳すると共に、前記平面画像に撮影されている該車両に前記マークを重畳して表示する画像重畳手段14cと、を有することを特徴とする。
(もっと読む)
目的位置案内方法及びシステム
【課題】位置センサにより計測した現在位置とゴールとなる目的位置の位置関係を携帯端末に表示し、容易な目的位置の入力方法で目的位置への案内を行う目的位置案内方法および目的位置案内システムを提供する。
【解決手段】地図をイメージスキャナで携帯端末に読み込み、デジタル地図として取り込む。地図に記載され、現場においても確認できる基準点2点の緯度経度座標値を、衛星測位システムの位置センサで計測する。基準点2点の緯度経度座標値は、直交座標系の座標値に変換し、デジタル地図の各ドットに対応する直交座標値を算出する。携帯端末では、衛星測位システムの位置センサの情報と、無線機からの補正信号を受け取り、位置センサが出力する現在位置とデジタル地図の現在位置のポインタが一致するようにデジタル地図を表示する。携帯端末には、作業者の歩行に伴い移動する現在位置の印とデジタル地図上の目的位置が同時に表示される。
(もっと読む)
車両周辺撮影送信装置および車両周辺撮影送信プログラム
【課題】施設情報の更新を新規な方法で実現する。
【解決手段】車両2に搭載される車両用ナビゲーション装置は、自らの記憶媒体中の格納画像4が撮影された位置の情報および現在の車両位置に基づいて、他の車両によって当該格納画像が撮影されたときと同じ走行状態(走行位置、走行方向)に車両2があると判定すると、画像3を撮影し、格納画像4中の施設の画像と撮影画像3中の当該施設に該当する位置の画像とが同じか否かを判定し、その判定結果が肯定的なものであるときには、今回撮影した画像をセンタに無線送信する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】静止時及び微速移動時において、信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、測位装置20の移動状態を判断する移動状態判断手段と、移動状態に基づいて、参照位置Pと、測位によって算出した現在の測位位置Pg(n)を平均化して平均位置を算出する平均位置算出手段と、平均位置を出力する位置出力手段と、平均位置を参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
車載用ナビゲーション装置
【課題】聴覚障害を持つユーザのハンディキャップを少しでも解消してより大きな快適・利便性をもたらすことができる車載用ナビゲーション装置を提供する。
【解決手段】音声案内に対応した視覚案内情報を、手話あるいは口話の画像もしくはアニメーションとして記憶しておき、音声案内が行われるタイミングで対応する視覚案内情報を運転席以外の乗員が視認可能な表示器に表示する車載用ナビゲーション装置として提供可能である。
(もっと読む)
衛星ナビゲーション受信機の性能を高めるシステム及び方法
【課題】衛星ナビゲーション受信機の性能を高める。
【解決手段】GPS受信機102は、高精密(例えば、原子)クロック発生源106及び処理装置108を備える。処理装置は、複数の宇宙基地の衛星送信機からの複数の測定信号を受信処理し、クロック発生源を制御して精密周波数を生成させる。処理装置は、例えば5以上の測定信号が受信された場合、従来のRAIMを実施して周波数誤差をモデル化し、受信した測定信号が4以下の場合、3つの位置エラーを計算し、複数の現在のクロック位相オフセット値を推定し、3つの位置エラーに対するポスト更新測定誤差を画定し、該ポスト更新測定誤差を正規化し、モデル化された複数の周波数誤差の値の増大をモデル化し、3つの位置誤差値及びモデル化されたクロックエラーを使用して保全性をチェックする。
(もっと読む)
地図情報処理システム、地図情報処理システムの制御方法、地図情報処理システムの制御プログラム、および地図情報処理システムの制御プログラムを記録した記録媒体
【課題】本願の課題の一例は、走行道路情報を最大限に活用することによって、現地調査を行なって新たな地図情報を作成するのではなく、ユーザからの走行情報を元に地図情報を更新し、地図情報のメンテナンス費用削減および更新地図データのユーザへの提供スピードを短縮することができる地図情報処理システム等を提供することことにある。
【解決手段】本実施形態に記載の地図情報処理システムは、ナビゲーション装置の記憶部に記憶されていない新たな道路を車両が走行している場合には、位置検出部において検出された生位置情報を表示部に表示するとともに記憶部に記憶し、車両がナビゲーション装置の記憶部に記憶されている道路へ到達した場合に、新たな道路を走行している間に検出された生位置情報等を、道路情報サーバ装置へ一度に送信し、道路情報サーバ装置は新しい道路に関する複数の生位置情報等をもとに新たな道路情報を作成する。
(もっと読む)
ナビゲーション装置
【課題】二次元座標で定義された経路を、立体的に表現された道路の路面にきれい載るように描く。
【解決手段】ナビゲーション装置は、リンクデータと道路の立体データとを記憶する手段と、経路を構成するリンクごとに、リンクの始点と終点の間に、複数の点P1・・・Pnを設定する手段と、複数のサンプル点P1・・・Pnごとに、立体データで表現される道路の路面82上の対応する点Pm1・・・Pmnを求める手段と、求めた路面上の点Pm1・・・Pmnを結んで、立体表示した道路の路面上に、経路を表示する表示手段とを備えている。
(もっと読む)
路側装置、端末装置およびDGPS測位システム
【課題】 マルチパス誤差を考慮したGPS測位を実現する。
【解決手段】 路側装置2を道路近くの既知の位置に設置するとともに、この路側装置2が、GPS衛星1からの電波を受信してGPS衛星1との間の第1の擬似距離d6およびGPS衛星1の第1の航法データd1を出力する第1のGPS受信機21、第1の航法データd1を用いて計算したGPS衛星1の位置d5と路側装置2の設置位置との間の直線距離および第1の擬似距離d2に基づき擬似距離誤差d6を求める擬似距離誤差計算部222と、擬似距離誤差d6に基づく補正データ5を生成する補正データ生成部223とを有する制御装置22、補正データ5を端末装置3に送信する通信機23を備えたことを特徴とする。
(もっと読む)
操舵角センサの異常判定装置
【課題】車両速度が遅い場合であれ、操舵角センサの異常の有無を高い精度で判定することができる操舵角センサの異常判定装置を提供する。
【解決手段】操舵角センサ21の異常の有無を判定する異常判定装置として、ナビゲーションシステム22の地理情報及び位置情報を参照しつつ車両がカーブ路走行中にあるカーブ路走行期間を検出するプログラムと、そのカーブ路走行期間内のセンサ出力の最大値を検出するプログラムと、その最大値について所定の閾値との対比を行うことにより該最大値が相当量に足りるかあるいは満たないかを判断するプログラムと、その判断により最大値が相当量に満たないと判断された場合に操舵角センサ21が異常である旨の判定をするプログラムと、を備える構成とする。
(もっと読む)
走行軌跡の表示方法,表示装置,表示制御用プログラム及びその表示制御用プログラムを記録した記録媒体
【課題】 車両の走行軌跡の表示方法を更に改善し、より簡易な方法で車両の走行軌跡を表示させることを目的とする。
【解決手段】 2次元座標上に設けられる複数の描画ポイントを結ぶように走行軌跡を描画して表示画面に表示する走行軌跡の表示方法である。前記描画ポイントの始点P0の座標値を所定値に定めるとともに始点P0における車両の向きを所定方向に定め、所定時間毎に記録された車速データと横方向の加速度データとに基づいて始点P0以降の各描画ポイントPnにおける回転角θn及び移動量dRn,dxnを算出し、この回転角θn及び移動量dRn,dxnに基づいて各描画ポイントPnの座標値Xn,Ynを算出する。
(もっと読む)
401 - 420 / 529
[ Back to top ]