
Fターム[2G064CC17]の内容
機械的振動・音波の測定 (8,359) | 測定信号の処理 (1,732) | 情報の抽出 (328) | 位相 (28)
Fターム[2G064CC17]に分類される特許
1 - 20 / 28
干渉型光ファイバセンサシステム
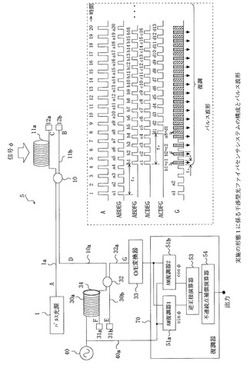
【課題】信号の復調を可能とする位相変化速度を向上する。
【解決手段】パルス光を出力するパルス光源1と、物理量を検知するセンシングファイバ11a、およびセンシングファイバ11aと伝搬遅延時間(τd)が等しい遅延補償ファイバ30aを有し、パルス光源1からのパルス光を干渉させる干渉計5と、干渉計5からの干渉光をサンプリングして物理量に対応する信号φを検出する検出部と、を備え、パルス光源1は、センシングファイバ11aにパルス光が入力してから出力されるまでの伝搬遅延時間(τd)より短い周期で、パルス光を出力し、検出部は、センシングファイバ11aの伝搬遅延時間(τd)より短い周期で、干渉光をサンプリングする。
(もっと読む)
動翼の振動計測方法および動翼の振動計測装置

【課題】動翼の振動を精度良く計測することができる動翼の振動計測方法および動翼の振動計測装置を提供する。
【解決手段】タービン動翼8が設けられたタービンロータ5を、回転軸Sを中心に回転させながら、タービン動翼8の振動を計測するタービン動翼8の振動計測方法において、タービン動翼8に対して軸方向に対向するように設置された第1非接触式検出センサ15を通過するタービン動翼8を検出する第1動翼検出工程と、タービン動翼8に対して径方向に対向するように設置された第2非接触式検出センサ16を通過するタービン動翼8を検出する第2動翼検出工程と、第1非接触式検出センサ15から得られた検出信号に基づいて、タービン動翼8の振動を導出する第1動翼振動導出工程と、第2非接触式検出センサ16から得られた検出信号に基づいて、タービン動翼8の振動を導出する第2動翼振動導出工程とを備えた。
(もっと読む)
音響インテンシティプローブ
【課題】安価なマイクロホンを使用しても実用上の音源の同定が可能となり、しかも安価であって構成も簡易である音響インテンシティプローブの提供。
【解決手段】この発明は、マイクロホン1、4、5は、直径aからなる円周30上に等間隔にそれぞれ配置される。このマイクロホン1、4、5と対をなるマイクロホン2、3、6は、直径aからなり円周30と間隔bをおいて平行に配置される円周40上であって、平面で見た場合にマイクロホン1、4、5の中間の位置にそれぞれ配置される。マイクロホン1〜6のそれぞれは、円周30の円周40と対向しない側から支持され、その支持の方向は円周30と交差する方向である。
(もっと読む)
音の到来方向判定システム及びプログラム
【課題】正しく推定された音の到来方向と正しく推定できなかった音の到来方向とを識別可能に表示する。
【解決手段】音の到来方向判定システム100は、測定ユニット10の各マイクロフォンへの音の到達時間差から、パーソナルコンピュータ20の演算処理部23の音源位置推定部24により音の到来方向を推定する。虚音源位置判定部25は、推定された音の到来方向の信憑性を判定する。表示処理部26は、信憑性が低いと判定された音源位置と信憑性が高いと判定された音源位置をディスプレイ29上に識別可能に同時に表示する。
(もっと読む)
ロータダイナミックシステムの横振動、角振動およびねじり振動監視
【課題】ロータダイナミックシステムの更なる進歩により、内蔵または現場でのねじり振動監視を提供する必要があり、この振動監視は、連続的または断続的に、あるいは必要に応じて動作することができ、ターボ機械の稼働中にシステムを停止させる必要なく実行できるものとする必要がある。したがって、ターボ機械の角振動およびねじり振動測定のための方法およびシステムを設計することが望ましい。
【解決手段】例示的実施形態は、回転要素の表面に、位相基準マークおよび複数の追加マークの両方を設ける。位相基準マークおよび複数の追加マークが回転して検出ゾーンを通るときに、近接プローブが両マークの通過を検出する。位相基準信号および振動基準信号の両方が発生され、これらの信号を使用して、回転要素の横振動および角(任意選択としてねじり)振動を計算する。
(もっと読む)
回転翼の非接触翼振動計測方法
【課題】少ない非接触センサで同等の情報を得ることができ、かつセンサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる回転翼の非接触翼振動計測方法を提供する。
【解決手段】ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
(もっと読む)
音源・振動源の探査方法と音源・振動源探査システム
【課題】音と振動とが同時に観測されたときに、観測された音が観測された振動源の発生する音かどうかを判別することのできる方法とそのシステムを提供する。
【解決手段】マイクロフォンM1〜M5を備えた音圧レベル測定手段11と、振動センサG1〜G4を備えた振動レベル測定手段12とを用いて、音源から伝搬する音と振動源から伝搬する表面波の振動とを同時に測定して、上記音の音圧レベルのデータから得られた音源方向の水平角θと上記振動の振動レベルのデータから得られた振動源方向の水平角θ’の方向とを比較して、観測された音が、音の発生を伴う振動源からの音であるか、あるいは、振動を伴わない音源からの音であるかの判定や、振動源が音を伴わない振動源であるかどうかの判定を的確に行うができるようにした。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
光ファイバ振動センサ
【課題】振動を検知するだけでなく、その振動がどこで発生しているのかという位置情報を得ることが可能なサニャック干渉型の光ファイバ振動センサを提供する。
【解決手段】振動を検出する構造体4に沿って配置される光ファイバループ2a,2bと、構造体4で発生した振動を光ファイバループ2a,2bを介して検出する振動センサ本体3とを備えたサニャック干渉型の光ファイバ振動センサにおいて、構造体4を長さ方向で2つの検査対象領域A,Bに区画すると共に、両検査対象領域A,Bに光ファイバループ2a,2bを構造体4に沿ってそれぞれ配置し、両光ファイバループ2a,2bで検出される振動の強度差、強度比、または位相差から、振動が発生した構造体4上の位置情報を検出するものである。
(もっと読む)
位相ベースの感知
位相ベース変換器の問い合わせは、位相変化として表される測定量の時間に対する変化率を決定するために、変換器からの単一パルス出力を一時的に重複および干渉することによって実行される。変化率、または位相変化の微分は一般的に、信号自体よりもはるかに小さい振幅を有し、したがって微分測定は、より低い感度を有する。このように、そうでなければオーバースケール効果を受ける可能性のある大きい振幅の信号が、より効果的に測定されることが可能である。 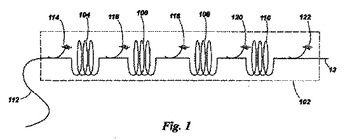 (もっと読む)
(もっと読む)
圧力波形測定装置及びその測定方法
【課題】管路状空間内を開口端部へ向けて伝搬する平面圧力波の圧力波形測定装置及びその方法を提供する。
【解決手段】該装置は、管路状空間に沿って離間して設けられた複数個の圧力波形測定手段と、圧力波形測定手段によって得られた圧力波形データを管路状空間に沿った基準位置に位相シフトさせて基準位置における、開口端部で反射した反射波を除去した圧力波形を得るデータ処理手段と、からなる。
(もっと読む)
チューブ波を用いたダウンホール流体の音速測定
5kHzから100kHzの周波数範囲で流体の音速および他の特性を測定するためのチューブ波を用いる技術。ドリルストリングは、掘削孔泥または層流体のようなダウンホール流体で満たされたキャビティを有するセンサチューブを備える。音響発信器およびアレイ状の音響受信器はチューブに搭載され、流体と特設接触する。処理回路は、例えば音速のような特性を、送信器により形成され、アレイ状の受信器により受信された音響信号の飛行時間に基づいて計算する。代わりに、周波数の関数とした信号位相の変化が、処理回路により用いられても良い。この技術は、特に、掘削孔の泥の音速を、その場で測定するのに適している。 (もっと読む)
車両騒音制御装置
【課題】振動センサに対するローパスフィルタを省略し、簡易な回路構成で高性能な騒音制御を行なうこと。
【解決手段】車両用の能動型騒音制御装置において、制御対象の振動を検知する参照センサ11の車体2に対する固定時に防振部材10を介在させる。防振部材10は、バネ定数と支持重量によって定まる周波数特性によって参照センサ11に加わる加速度を吸収するので、参照センサ11の出力に対する物理的なローパスフィルタとして機能させ、電気回路構成上からローパスフィルタを省略する。
(もっと読む)
無線型振動計測システム及び方法
【課題】回転体のロータの振動位相計測を効率良く行うことができる振動計測システムを提供することである。
【解決手段】ロータの回転振動変位を振動波形信号として検出する振動センサと、ロータの回転を回転パルス信号として検出する回転検出器と、前記振動センサで検出された振動波形信号及び回転検出器で検出された回転パルス信号に基づいてロータのアンバランス成分を検出する振動位相検出装置と、前記回転検出器で検出した回転パルス信号を無線で前記振動位相検出装置に伝送する無線伝送ユニットとを備え、振動位相検出装置は回転検出器からの回転パルス信号の伝送遅れを補正して振動位相を求める。
(もっと読む)
検査装置およびその制御方法、ならびに検査装置制御プログラム
【課題】稼働条件を変化させても、良否判定の基準を変更する必要がない検査装置などを提供する。
【解決手段】回転体の検査を行う検査装置の検査部34は、検査対象の回転体を含む対象装置からの振動信号を取得するセンサ情報取得部33と、回転体の基準位置が1回転するごとに生成される対象周期パルスを取得する対象周期パルス生成部42と、振動信号のうち、所定数の対象周期パルスを取得する期間の振動信号をフレームとして抽出するフレーム抽出部45と、複数のフレームを用いて代表特徴量を算出して良否の判定を行う代表特徴量算出部49とを備えている。
(もっと読む)
紙擦れ音除去装置
【課題】 従来の音源分離手法では、テレビ会議で問題となる、紙擦れ音などの突発的かつ音声との仰角差が小さい雑音を除去することができなかった。
【解決手段】 本発明では、複数のマイク間隔及び複数のサブマイクロホンアレイを用いて、音源同士の方向差が小さい場合であっても、到来方向を高精度に推定することが可能な位相差ヒストグラム算出部を保持する。また位相差ヒストグラム算出部は、1フレームのデータのみで、ヒストグラムを作るため、突発的に生じた雑音であっても、定位可能となる。
(もっと読む)
触覚検出装置
【課題】触感を損なわない触覚検出装置を提供すること。
【解決手段】触覚のセンシング面101と、センシング面101よりも内側に配置されているマイク102aと、マイク102aからの出力信号を演算処理し、出力データを出力する信号処理部120と、出力データに基づいてセンシング面101における接触状態を判定する接触状態判定部140とを有する。このような構成により、触感を損なわない触覚検出装置を提供することができる。
(もっと読む)
アクティブ消音装置におけるオンライン同定時の信号処理方法
【課題】Zhangの方法をさらに改良し、音源の急激な変化に対しても発散することなく、適切な消音効果の維持を実現するオンライン同定における信号処理方法を提供する。
【解決手段】騒音とは無相関な同定音をノイズジェネレータ10により生成し、同定信号を消音誤差で重み付けをして、常時同定を行うアクティブ消音装置1におけるオンライン同定時の信号処理方法であって、前記消音誤差として、二次経路フィルタの同定誤差es(n)と、一次経路フィルタの同定誤差e´(n)とを用いる。
また、重み付けの方法が、二次経路フィルタの同定誤差es(n)と、一次経路の同定誤差e´(n)との積を、同定信号に加算して重み付けをし、かつ、二次経路フィルタの同定誤差es(n)と、一次経路の同定誤差e´(n)との積に、可変としたゲインαを与えて、重み付けの調整を可能とする。
(もっと読む)
固有振動モード抽出方法、固有振動モード抽出装置、および固有振動モード抽出用プログラム
【課題】入力がノイズの多いものであっても高い信頼性で各種構造物の固有振動モードを求めることのできる固有振動モード抽出方法、固有振動モード抽出装置、および固有振動モード抽出用プログラムの提供。
【解決手段】ある構造物にある入力を加えたときの出力データについて固有値解析して前記構造物の固有モードおよび前記固有モードのモード振幅コヒーレンス(Mode Amplitude Coherence、以下「MAC」という。)を求める工程と、前記固有モードのMACに基づいて前記固有モードを前記構造物の振動特性に起因するものとノイズに起因するものとに分別し、前記出力に対応する固有モードを固有振動モードとする工程とを有する固有振動モード抽出方法、固有振動モード抽出装置、および固有振動モード抽出用プログラム。
(もっと読む)
設備の異常診断方法及び装置
【課題】診断対象が稼動中に発する異常音により設備異常診断を行なう際に、当該設備の周辺騒音が診断の外乱となるような場合においても、簡単な構成で、当該設備の稼動音のみを選択的に収集して、異常診断の精度を向上させる。
【解決手段】診断対象設備10の稼動音を収集するための集音マイク12と、周辺騒音を拾うための騒音マイク14とを用いて、該騒音マイク14で拾った周辺騒音を、前記集音マイク12で収集した診断対象からの音に逆位相で加算して、周辺騒音をキャンセルする。
(もっと読む)
1 - 20 / 28
[ Back to top ]