
Fターム[2G064CC26]の内容
機械的振動・音波の測定 (8,359) | 測定信号の処理 (1,732) | 情報の加工 (929) | A/D変換 (47)
Fターム[2G064CC26]の下位に属するFターム
2値化 (4)
Fターム[2G064CC26]に分類される特許
1 - 20 / 43
鉄道構造物の振動特性同定方法および装置
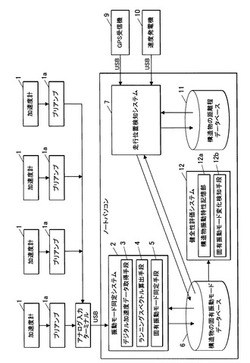
【課題】鉄道構造物に加速度計を設置することなく、鉄道構造物の振動特性を容易かつ確実に同定できる鉄道構造物の振動特性同定装置を提供する。
【解決手段】鉄道車両Sの軸箱に設けられた加速度計1と、加速度計1によって測定された加速度データをサンプリングして、デジタル加速度データを取得するデジタル加速度データ取得手段3と、取得したデジタル加速度データをFFT解析して、ランニングスペクトルを算出するランニングスペクトル算出手段4と、算出したランニングスペクトルにおいて、鉄道車両Sが鉄道構造物K上のレールRを走行している時間における卓越振動数のうち、外乱の影響による卓越振動数以外の卓越振動数を鉄道構造物Kの固有振動数とする固有振動モード同定手段5とを備えたので、鉄道構造物に加速度計を設置することなく、鉄道構造物の振動特性を容易かつ確実に同定できる。
(もっと読む)
異常状態検出方法および電子機器

【課題】電子機器の加速度を監視する際の適切なサンプリング周期を設定し、電子機器の異常状態を検出する方法を提供することである。
【解決手段】本発明に係る異常状態検出方法は、第1のサンプリング周期で加速度センサ120の出力値を所定時間測定するステップと、加速度センサ120の出力値の極値を抽出するステップと、極値間の時間間隔の平均値を計算するステップと、電子機器100を監視する際の第2のサンプリング周期を決定するステップと、第1のサンプリング周期で測定した加速度センサ120の出力値および第2のサンプリング周期をメモリ150に書き込むステップと、第2のサンプリング周期を設定するステップと、電子機器100を第2のサンプリング周期で監視し、第1のサンプリング周期で測定した加速度センサ120の出力値に基づいて、電子機器100が異常状態にあるか否かを判定するステップとを含むことを特徴とする。
(もっと読む)
干渉型光ファイバセンサシステム
【課題】信号の復調を可能とする位相変化速度を向上する。
【解決手段】パルス光を出力するパルス光源1と、物理量を検知するセンシングファイバ11a、およびセンシングファイバ11aと伝搬遅延時間(τd)が等しい遅延補償ファイバ30aを有し、パルス光源1からのパルス光を干渉させる干渉計5と、干渉計5からの干渉光をサンプリングして物理量に対応する信号φを検出する検出部と、を備え、パルス光源1は、センシングファイバ11aにパルス光が入力してから出力されるまでの伝搬遅延時間(τd)より短い周期で、パルス光を出力し、検出部は、センシングファイバ11aの伝搬遅延時間(τd)より短い周期で、干渉光をサンプリングする。
(もっと読む)
キャビテーション壊食量予測方法及び予測装置
【課題】簡単にキャビテーション壊食量を予測することが可能な流体機械のキャビテーション壊食量の予測方法及び予測装置を構築する。
【解決手段】流体機械に振動加速度センサを取りつけ、振動加速度センサにより計測された振動加速度の値からキャビテーションの気泡崩壊による衝撃圧を算出し、このキャビテーションの気泡崩壊による衝撃圧から流体機械に生じているキャビテーション強さを算出し、キャビテーション強さからキャビテーション衝撃力をパラメータにしたキャビテーションエネルギー分布を推定し、このエネルギー分布の中で流体機械の材料に壊食を生じさせるしきい値以上のキャビテーションエネルギーの総和を算出し、キャビテーションエネルギーの総和と、予め求めた最大壊食速度の関係から流体機械における最大壊食速度を算出し、この最大壊食速度と流体機械の運転時間とからキャビテーションによる最大壊食量を予測する。
(もっと読む)
音響監視システム、及び音声集音システム
【課題】監視対象以外の音源が多数存在する環境では、ノイズの問題から監視精度が劣化する、又、多数の機器が動作する環境において、初期設定を簡単に行うことが必要である。
【解決手段】複数のマイクロホンを有するマイクロホンアレイ501と処理部の拠点毎異常音監視部504を有する音響監視システムであって、拠点毎異常音監視部504は、波形取り込み部502、ネットワーク503経由で入力されるマイクロホンアレイの入力信号により、音源方向のヒストグラムの時間変化を検出し、その変化検出結果に基き、音場に異常が生じたかどうかを判定し、監視結果を出力する。また、処理部は、監視対象の音源近傍に存在するマイクロホンアレイ501を探索し、探索したマイクロホンアレイのマイクロホンに関する種々のデータに基づき、監視対象の音源の音場監視機能を選択する。
(もっと読む)
超低周波音測定による構造体の状況評価方法
【課題】 地盤やコンクリート構造物等の構造体を伝播する超低周波音の影響を正確に把握、評価する。
【解決手段】 観測対象の構造体で発生あるいは伝播する超低周波音パルスの音圧強度を所定計測間隔で連続計測する。その計測結果として得られた超低周波音の音圧強度と卓越周波数との関係を求め、数値評価結果をもとに観測対象の状況、評価を行い、その結果を表示装置等で示す。評価の手法として、観測対象で得られた複数データの超低周波周波数(Hz)-1と、ピーク超低周波音圧強度ピーク低周波音音圧強度(×10-8W/m2)1/2との相関関係を図示し、その状況評価を行うことができる。
(もっと読む)
衝撃モニタリングシステム、装置及び方法
【課題】特に隣接する大きな騒音に囲まれた中で機械の衝撃事象を判定する上での問題を解決し、大量のデータ記憶域を必要とする問題を解決し、且つ高周波成分と付随する機械の衝撃事象の消失を生じる信号処理上の問題を解決する装置及び方法。
【解決手段】変換器を用いて機械をモニタリングする段階と、前記電気信号をサンプリングしてデジタル化信号にする段階と、取得された前記デジタル化信号の最大値及び最小値を、前記電気信号がサンプリングされた回転要素の相関付けられた所定の回転角度によって定められる位置を有する複数のデジタルパケットの各々に対して求めることによって、複数のデジタルパケットに変換し、最大及び最大デジタルパケットとこれらの回転角度のみを格納する段階と、前記複数の最大及び最小デジタルパケットの値及びこれらの回転角度と、既知の値とを比較する段階と、前記比較段階に基づき衝撃事象を判定する段階と、を含む。
(もっと読む)
感知及び通信能力を備える、磁性流体回転フィードスルー
【課題】回転フィードスルーの状態を示すことが可能な回転フィードスルーを提供する。
【解決手段】磁性流体回転フィードスルー100は、第1の環境と第2の環境との間に延在するために、軸周りに磁性流体シール160を設けように構成された多段式磁性流体回転シールと、多段式磁性流体回転シールの物理的パラメータを感知するために磁性流体回転フィードスルー内に一体的に取付けられた1つまたは複数のセンサの組み合わせと、1つまたは複数のセンサ210から1つまたは複数のセンサ出力信号を受信して、1つまたは複数のセンサ出力信号を処理し、1つまたは複数の電子処理信号を出力するために、磁性流体回転フィードスルーに取り付けられた、または、組み込まれた信号処理電子装置と、信号処理電子装置から1つまたは複数の電子処理信号を受信して、多段式磁性流体回転シールの状態を示す、電気的に接続された1つまたは複数の出力装置220とを備える。
(もっと読む)
微弱信号解析装置、微弱信号解析方法、及び微弱信号解析プログラム
【課題】A/D変換器が発生するノイズの影響を小さくして高精度な自己スペクトラムが得られるような微弱信号解析装置を提供する。
【解決手段】入力される微弱信号を2系統に分岐し、第1系統1、3の微弱信号と第2系統2、4の微弱信号のスペクトラム関係を示す相互スペクトラムを求めて平均化処理5した後に、該相互スペクトラムの実数部を前記微弱信号の自己スペクトラムとして抽出6し、該微弱信号のスペクトラム解析を行う。
(もっと読む)
振動監視装置
【課題】簡素なフィルタ機能でエリアジングエラーを防止することができ、また、振動変位のピーク値をピーク周波数前後の成分も含めて求めることで、精度よいピーク値を求めることができる振動監視装置を提供する。
【解決手段】振動加速度センサで検出した振動のアナログ出力信号を、該アナログ出力信号の監視対象周波数の上限近傍をカットオフ周波数としたローパスフィルタを介した後に増幅すると共に、この増幅された信号をデジタル変換して得られたデジタル信号を、アナログ出力信号の監視対象周波数の上限近傍の少なくとも4倍に設定したサンプリング周波数でサンプリングし、そのサンプリング信号を周波数分析する。
そして、前記監視対象周波数範囲における所定の周波数における振動変位のピーク値を、予め設定された周波数帯域間の成分の2乗和平方根で算出する。
(もっと読む)
振動測定システム
【課題】各種センサーと測定器との間の結線を無くし、しかも各種センサーの振動測定同時性を確保できる振動測定システムを提供することである。
【解決手段】振動加速度を検出するための加速度センサーで検出した振動加速度信号をデジタル変換処理しそのデジタル信号を無線方式で計測器に伝送する加速度センサー機器14と、振動を検出するための振動センサーで検出した振動信号をデジタル変換処理しそのデジタル信号を無線方式で計測器に伝送する振動センサー機器16と、回転数を検出するための回転パルス計で検出した回転パルス信号を無線方式で計測器に伝送する回転パルスセンサー機器17とを備える。
(もっと読む)
発音計数システム音声カウンタ−(以下音声カウンタ−)
【課題】介護医療テストのため、(パ)(タ)(カ)の単位時間内の発音回数の測定を手動で行つて居るが、より正確に、より簡単に自動計測をするための手段として、全て自動的に回数計算を行い、その結果を即刻、数字として表示する。
【解決手段】人によつて異る音声を個人別にサンプルとして収録し、音声比較をしながら回数を計算する。これらは全てマイコンの領域内でデジタルに変換されたテ−タ−として高速処理される。2桁の数字は表示器に表され、必要に応じてデ−タ−を保存して拡大利用のシステムとして活用できることを特徴とする。
(もっと読む)
異常診断装置
【課題】低分解能のAD変換器や単なる比較器を使用して回路の低コスト化および省スペース化を図り、且つ精度低下を招くことなく異常診断を行なうことができる異常診断装置を提供すること。
【解決手段】機械装置の振動を検出する振動センサ111からのアナログ信号をデジタル信号に変換するAD変換器153と、AD変換器153からのデジタル信号をフーリエ変換処理し、その結果に基づいて異常診断を行なう診断処理部150Bと、を備え、診断処理部150Bが、AD変換器153からのデジタル信号をその分解能よりもデータ幅を拡張してフーリエ変換処理するように構成した。
(もっと読む)
ノックセンサ信号処理装置
【課題】ノックセンサ信号のA/D変換精度を保障し、正確なノック判定を実現可能なノックセンサ信号処理装置を提供する。
【解決手段】ノックセンサから出力される信号(ノックセンサ信号)を、少なくともエンジンの各気筒毎のノック判定区間においてA/D変換器に一定時間毎にA/D変換させ、そのA/D変換値であるセンサA/D値に対して、ノック判定のためのデジタルフィルタ処理を実施する信号処理装置では、前回の気筒のノック判定区間が終了した後、次の気筒についてのA/D変換器によるノックセンサ信号のA/D変換を開始するまでの間に、A/D変換器に既知の基準電圧(基準B,基準A,基準C)を順次A/D変換させ、その基準電圧のA/D変換値から、センサA/D値を補正するための補正係数を算出する。そして、デジタルフィルタ処理対象の各センサA/D値を上記補正係数を用いて補正する。
(もっと読む)
信号処理装置、信号処理方法、及びコンピュータプログラム
【課題】計測された物理量と基準値とを可及的にリアルタイムで比較することができるようにする。
【解決手段】CPU106は、音圧レベルの基準値(実効値)を生成してDSP105に出力する。一方、DSP105は、音圧レベルの計測値(実効値)を生成し、生成した音圧レベルの計測値(実効値)と、CPU106から入力した音圧レベルの基準値(実効値)とを比較し、比較した結果を示す信号を表示装置110に出力する。これにより、音圧レベルの計測値(実効値)と、音圧レベルの基準値(実効値)とを、A/D変換器104におけるサンプリング周波数に同期して1サンプル毎に比較することができる。したがって、音圧レベルの計測値と基準値とを可及的にリアルタイムで比較することができる。
(もっと読む)
鉄道車両の車軸支持装置の異常診断方法及び装置
【課題】 鉄道車両の脱線事故の防止に寄与し得る、異常診断方法及び装置を実現する。
【解決手段】 車軸に外嵌固定した1対の内輪5、5と共に回転及び軸方向変位するエンコーダ13の被検出部である外周面に、外輪4に支持した1対のセンサ14、14の検出部を近接対向させる。これら各センサ14、14の出力信号の周波数に基づいて上記各内輪5、5の回転速度を算出自在とする。これと共に、上記各センサ14、14の出力信号同士の位相差に基づいて上記外輪4と上記内輪5、5との間に作用するアキシアル荷重を算出自在とする。そして、このアキシアル荷重に基づいて異常診断を行なう事により、上記課題を解決する。
(もっと読む)
音名検出器及びプログラム
【課題】 自己相関によるピッチ測定のための計算量を少なくし、基音のレベルが弱い場合や低音域の楽音等であっても高精度なピッチ測定を効率的に行えるようにする。
【解決手段】 調律器1における音名検出処理では、外部から入力される音響波形の音名を検出するための自己相関処理を実行する。ステップS40〜S42では入力された音響波形について、所定の時間範囲の変数m1〜m4を対象に自己相関を求める(第1の自己相関手段)。ステップS43では、前記第1の自己相関手段の変数m4について計算結果に基づき音響波形の音域が高音域か低音域かを判定する(音域判定手段)。ステップS44又はS45では、前記音域判定手段で判定した音域に対応する時間範囲を対象に、前記音響波形について自己相関を求める(第2の自己相関手段)。そして、ステップS46、S47において第2の自己相関手段の計算結果に基づき音名を決定する。
(もっと読む)
内燃機関のノッキング判定装置
【課題】 ノイズを抑制してノッキングに起因する振動を検出するとともに、ノイズに起因する振動が取り込まれ得る振動波形により、ノッキングに起因する振動波形とノイズに起因する振動波形とを区別する。
【解決手段】 エンジンECU200は、第1の周波数帯Aの振動のみを抽出するバンドパスフィルタ(1)410と、第2の周波数帯Bの振動のみを抽出するバンドパスフィルタ(2)420と、第3の周波数帯Cの振動のみを抽出するバンドパスフィルタ(3)430と、第1〜第3の周波数帯を含む第4の周波数帯Dの振動のみを抽出するバンドパスフィルタ(4)440とを含む。エンジンECU200は、第4の周波数帯Dの振動波形および第1〜第3の周波数帯の合成波形における振動の強度のピーク値に基づいてノッキングが発生したか否かを判定する。
(もっと読む)
軸受異常診断システム、軸受異常診断装置及び軸受異常診断方法
【課題】 診断を行う場合に回転機の回転数が変動する場合でも、適切な診断しきい値を迅速に設定することができる軸受異常診断システムを提供する。
【解決手段】 軸受異常診断システム20を構成する設備保全コンピュータ17は、加速度ピックアップ15によって測定された軸受13の振動データが与えられると当該振動データの代表値を算出し、軸受13の型式データ及びPLC3より取得した回転速度情報に基づいて、データベース19より対応する診断しきい値を読み出して、前記代表値と診断しきい値とを比較することで軸受13の異常診断を行う。
(もっと読む)
内燃機関のノッキング判定装置
【課題】 ノイズを抑制して、ノッキングに起因する振動を検出する。
【解決手段】 エンジンECU200は、バンドパスフィルタ(1)410と、バンドパスフィルタ(2)420と、バンドパスフィルタ(3)430とを含む。バンドパスフィルタ(1)410は、ノックセンサが検出した振動から、第1の周波数帯Aの振動のみを抽出する。バンドパスフィルタ(2)420は、ノックセンサが検出した振動から、第2の周波数帯Bの振動のみを抽出する。バンドパスフィルタ(3)430は、ノックセンサが検出した振動から、第3の周波数帯Cの振動のみを抽出する。第1の周波数帯A、第2の周波数帯Bおよび第3の周波数帯Cの帯域幅は同じである。エンジンECU200は、これらの周波数帯の合成波形における振動の強度のピーク値を算出し、ピーク値に基づいてノッキングが発生したか否かを判定する。
(もっと読む)
1 - 20 / 43
[ Back to top ]