
Fターム[3B150LB01]の内容
Fターム[3B150LB01]に分類される特許
1 - 20 / 413
生地供給装置
【課題】生地をミシンへ送り込む作業を自動化するような場合にあって、送り込みの途中で生地に弛み皺を発生させることがないようにし、またミシンの針落部に対して生地を真っ直ぐに送り込むことが確実に行えるようにする。
【解決手段】ミシン2の針落部3に向けて連設状に設置される生地テーブル5と、ミシン2へ生地Wを送り込む中間送り機構6とを有しており、中間送り機構6は、生地Wを生地テーブル5上へ押さえ付けながら駆動回転する送りローラ10と、この送りローラ10を生地テーブル5上の生地Wに対して送り方向Xと交差する方向Yで出入り移動させる出入り調節機構13とを有している。
(もっと読む)
ミシン

【課題】縫い代を安定して検出する。
【解決手段】被縫製物を交差方向送る主送り機構20と横送り機構と、被縫製物の縫い代を検出する端部検出装置40,60と、縫い代が目標値となるように横送り機構を制御するミシン100において、端部検出装置は、光源と、複数の受光部が被縫製物幅方向に沿って複数並んで設けられ、被縫製物の側端部により遮蔽された照射光から当該被縫製物の側端部の被縫製物幅方向の位置検出を行う検出素子45,65とを有し、端部検出装置を被縫製物幅方向に沿って移動させるアクチュエータ47,67と、縫い代の目標値の変化に応じて、アクチュエータの移動制御を行う制御部13とを備えている。
(もっと読む)
シート体の縁部検出センサ
【課題】生地などのシート体の縁部を正確に検出することができる。
【解決手段】当接部材20と、当接部材20に面当接しているシート体Wへ向けて検出光を投光する投光部2と、投光部2が投光した検出光を受光する受光部3と、受光部3の受光量を基にシート体Wを検出する検出部35とを備え、投光部2は、シート体Wとその縁部Waから外れた外領域とにわたって検出光を投光できるように並設された複数の投光口2aを有し、受光部3は投光口2aに個別に対応する受光口3aを有し、検出部35は受光口3aに個別に対応する判断部を有している。
(もっと読む)
布端位置検出装置及びミシン
【課題】数本のケバによる電圧変化を無視して加工布の布端位置を簡易な構成により検出すること。
【解決手段】布端位置検出装置は、布端位置に応じた電圧を出力する布端センサ(6)と、前記布端センサに出力された電圧に基づいて前記布端位置を検出する布端センサコントローラ(71)とを有し、前記布端センサコントローラは、布端を挟んで加工布(W)の内側から外側に向う方向において、布端判定用の閾値(Ve)を最初に超える電圧変化が生じた位置を前記布端位置として判定する構成とした。
(もっと読む)
テープ送り出し装置、及びテープ縫い付け装置
【課題】1つのモータで2つのローラを駆動してテープを送り出せるようにして、テープの伸びを少なくできるとともに、2つのローラ間にメスを配置できて、テープの排出も容易にする。
【解決手段】テープを送り出す装置であって、1つのモータと、テープの送り出し方向に間隔を開けて配置され、テープTに圧接してテープTを送る2つのローラ381・382と、2つのローラ381・382の回転軸をそれぞれ回転自在に保持するホルダ383と、ホルダ383を挟んで2つのローラ381・382と反対側において1つのモータの駆動軸の回転動力を2つの回転軸に伝達する動力伝達機構39と、ホルダ383を、2つのローラ381・382の間を支点として揺動させ、2つのローラ381・382の一方のみを選択的にテープTに圧接させるローラ切り替え機構330と、を備える。
(もっと読む)
ミシン
【課題】針棒の下端周辺に設けた構成部品の有無に関わらず、縫製データ作成時に正確な針落ち点を設定できるミシンを提供する。
【解決手段】CPUは、縫製データ作成時に仮想針落ち点モードに移行し、針落ち点が縫針の直下の本来の位置から所定方向に所定距離離れた位置に位置するように、縫製対象物の保持体を移動する(S101)。CPUは、移動後の縫製対象物上の針落ち点を仮想針落ち点として視認可能な状態で示す合成画像をディスプレイに表示する(S103)。作業者は、仮想針落ち点を確認しながら指示を入力し、所望の模様を縫製する為の針落ち点の位置を順に指定する(S104、S106、S111、S113、S117、S130)。CPUは、指示に応じて、仮想針落ち点の座標を実際の針落ち点の座標に変換することで針落ち点を順に設定し、縫製データを作成する(S107、S114、S120、S141)。
(もっと読む)
ミシン
【課題】針棒の下端周辺に設けた構成部品の有無に関わらず、作業者が縫製再開時の針落ち点の位置を容易に調整できるミシンを提供する。
【解決手段】縫製中の異常で縫製が中断する場合、CPUは、仮想針落ち点モードに移行し、針落ち点が縫針の直下の本来の位置から所定方向に所定距離だけ離れた位置に位置するように保持体を移動する(S221)。CPUは、移動後の縫製対象物上の針落ち点を仮想針落ち点として視認可能な状態で示す合成画像を表示する(S222)。作業者は、一針後退又は一針前進の指示を入力して(S227:YES、S231:YES)、縫製再開時の針落ち点を指定する(S228、S232)。CPUは、縫製再開指示の入力を検知すると(S226:YES)、通常モードに移行し、縫製再開時の針落ち点が縫針の直下に位置するように保持体を移動する(S242)。ミシンは該針落ち点から縫製を再開する(243)。
(もっと読む)
ミシン及び刺繍枠
【課題】加工布を保持する刺繍枠を移動及び回転駆動が可能なミシンに関し、特に、刺繍枠の回転駆動手段が大型化することを防止するミシン、及び刺繍枠を提供する。
【解決手段】刺繍枠9は、内枠91、中枠92、及び外枠94が組み合わされて構成されている。刺繍枠9は、内枠91と中枠92との間で加工布100を狭持する。ミシンは、刺繍枠9に設けられたモータ947を駆動させて、外枠94に対して中枠92が回転可能である。ミシンに設けられたイメージセンサによってミシンに装着された刺繍枠9を含む領域が撮像される。撮像された画像151から、内枠91に付された標識110が識別され、識別された標識110を用いて、外枠94に対する中枠92の回転角度が検出される。検出された回転角度である検出角度と、予め記憶された枠回転データとに基づいてモータ947が制御され、外枠94に対する中枠92の回転角度が調整される。
(もっと読む)
ミシン
【課題】ユーザが、回転可能な刺繍枠の角度を容易に合わせることができるミシンを提供する。
【解決手段】刺繍枠9は、内枠91、中枠92、及び外枠94が組み合わされて構成されている。刺繍枠9は、内枠91と中枠92との間で加工布100を狭持し、外枠94に対して中枠92が回転可能である。ミシンに設けられたイメージセンサによってミシンに装着された刺繍枠9を含む領域が撮像される。撮像された画像151が液晶ディスプレイ15に表示される。撮像された画像151から、内枠91に付された標識110が識別され、識別された標識110に基づいて、外枠94に対する中枠92の回転角度が検出される。検出された回転角度である検出角度に基づいて、中枠の回転角度を所定の角度に合わせるための情報である回転情報が液晶ディスプレイ15に表示される。
(もっと読む)
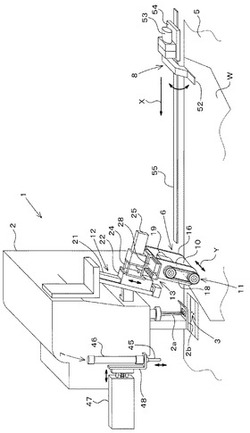
空環縫込み装置付きオーバーロックミシン
【課題】空環切断後のミシン側に残った空環の自由端は吸引切断直後に空環吸引管の吸入孔から吸引通路外へこぼれ落ちることなく、吸引通路内に確実に吸引され、空環を確実に吹き返すことができ、安定した空環縫込みを実現できるようにする。
【解決手段】布地Nの後端に形成したシームに連なって作り出された空環Chを、針板2の針落ち部5より後方側に設けられた空環吸引管25の吸入孔26aに吸引して該吸入孔26a内で切断し、ミシン側に残った空環Chの自由端を針落ち部5の手前側の針板2面上に風圧により吹き出し移動させ、この移動してきた空環Chを針落ち部5の手前側で挟持し、この挟持した空環Chを次の布地Nに形成されるシーム中に縫い込むようにした空環縫い込み装置を備えたオーバーロックミシンにおいて、空環吸引管25の内底面25aが正面側からみて右下がりに傾斜した斜面に形成されている。
(もっと読む)
シート体の位置合わせ方法及びシート体の位置合わせ装置
【課題】簡単にシート体の位置合わせを行うことができる。
【解決手段】搬送ライン2上にシート体Wを検出するための第1検出センサ3aを設置すると共に第1検出センサ3aとは離れた位置にシート体Wを検出する第2検出センサ3bを設置しておき、シート体の位置合わせを行う際は、シート体Wを移動させることによって第1検出センサ3aでシート体を検出してから第2検出センサ3bで検出するまでのシート体Wの移動距離L3を求め、移動距離L3と、第1検出センサ3aと第2検出センサ3bとのセンサ間距離L4とに基づいてシート体Wの傾きθを求め、シート体の傾きを修正することでシート体の位置合わせを行う。
(もっと読む)
ミシン
【課題】縫い代を目標値通りに縫製を行う。
【解決手段】被縫製物CU,CDを水平に送る主送り機構20と、被縫製物を被縫製物幅方向に沿って移動させる横送り機構30,36と、縫い代を検出するための端部検出装置40,60と、被縫製物の縫い代が目標値となるように横送り機構を制御する制御装置130とを備え、端部検出装置は反射面12を照射する光源631と、反射面による反射光を受光する複数の受光部が複数並んで設けられた検出素子65と、光源からの照射光を平行光化し、反射面に対して垂直方向又は当該垂直方向に対して被縫製物幅方向に沿った軸回りに傾斜した方向から平行光化した照射光を照射する光学素子632とを備えている。
(もっと読む)
ミシンの目飛び検出装置
【課題】糸の太さ・種類等変わってもセンサ等の感度調整の必要がなく、ゴミ等の影響も受けずに、目飛びを検出する。
【解決手段】ミシン上軸に連結され、上下動する針棒11と、ミシン上軸に連動して回転し、針棒と協働して縫い目を形成する釜と、糸巻から天秤に至る経路上に配置され、上糸に張力を付与する糸調子器4と、その糸調子器に付設され、上糸張力を受けて初期位置Bと作動位置Aの間を揺動すると共に、糸掛け部を有する糸取りばね5と、を備えるミシンにおいて、糸取りばねが初期位置Bに位置するか否かを検出する検出手段と、その検出手段による糸取りばねの挙動検出に基づいて糸の目飛びを検出する制御手段と、を備える。制御手段は、天秤下死点から所定上軸角度(天秤下死点+60°)の範囲内にあって、検出手段21による糸取りばね5の初期位置の検出により目飛びと判断して、警告信号を出力するか、又はミシンの駆動を停止する。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止しつつ余分な下糸繰り出しを防止する。
【解決手段】半回転釜60と糸寄せ機構50とを備えるミシン100において、半回転釜は、当該半回転釜の前進回動時に上糸を捕捉する剣先64と、半回転釜の後退回動時にボビン31から針板の針穴15に渡る下糸に摺接して縫いにより消費される下糸の繰り出しを行う下糸繰り出し部65とを備え、下糸繰り出し部は、ボビンの周囲において前方に向かって立設された凸条であって、繰り出しの開始から最大繰り出し位置zまで連続的な登り勾配で形成された繰り出し量増加傾斜部651と、最大繰り出し位置から最小繰り出し位置yまで連続的な下り勾配で形成された繰り出し量減少傾斜部652とを備え、最大繰り出し位置を糸寄せ部材による糸寄せ開始以前に下糸が到達する配置とし、最小繰り出し位置を糸寄せ部材による糸寄せ完了以前に下糸が到達する配置とした。
(もっと読む)
針振り機構を備えたミシン
【課題】 ニーリフターで布押さえの上げ下ろしと針振りの両方を行えるミシンを提供する。
【解決手段】 ミシン上軸位相検出装置3からの信号によりミシン停止中であれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行い、ミシン稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行う。
(もっと読む)
多針ミシン
【課題】多針ミシンに載置された糸駒を用いて刺繍模様の配色を簡単に行え、且つ多様な配色パターンの刺繍模様の縫製を行うことができる多針ミシンを提供する。
【解決手段】多針ミシンは、糸駒載置部に載置される複数の糸駒の糸色を糸駒色データとして記憶する糸駒色記憶手段を備える。多針ミシンの制御装置は、取得した乱数に基づいて、糸駒色記憶手段に記憶された複数の糸駒色データの中からランダムに色を抽出すると共に、抽出した糸駒色データを、刺繍模様における色別模様部の糸色データとして割り当てる(ステップB4〜B23)。
(もっと読む)
ミシンの上糸テンション計測装置
【課題】ひずみゲージの抵抗値のばらつきや、温度変化、縫製速度の変化、絶縁抵抗の変化によらず、高精度にミシンの上糸テンションを計測することができるミシンの上糸テンション計測装置を得ること。
【解決手段】一辺に半導体歪みゲージ20を含むホイートストンブリッジ18における固定抵抗器19cにDP21を並列接続。ミシン制御部14は、縫製時に増幅器22が出力する計測テンションのオフセット量が許容範囲外であるとき、オフセット制御・ゲイン補正部15にオフセット調整指示を出し、零テンション検出手段16が検出指定する上糸の零テンションの期間を知らせる。オフセット制御・ゲイン補正部15は、上糸の零テンションの期間において、オフセット量を許容範囲内に収める抵抗値を算出してDP21に更新設定し、半導体歪みゲージ20の初期抵抗値を求めて増幅器22のゲイン補正を行う。
(もっと読む)
ミシン
【課題】縫製可能領域よりも広い範囲に複数の模様を縫製する場合、複数の模様間の位置合わせのための基準を、ユーザが柔軟に設定したり変更したりすることが可能なミシンを提供する。
【解決手段】第一模様と第二模様の相対的な配置を決定するための、第一模様に関する第一基準が、ユーザの指定により設定される。ユーザが設定された第一基準を変更したい場合には、ユーザの指定により変更後の第一基準が設定される(S312)。第二模様に関する第二基準が、ユーザの指定により設定される(S303)。変更後の第一基準と第二基準とに基づき、第一模様と第二模様の相対的な配置が決定される(S304)。第一保持位置と第二保持位置とで縫製対象物に配置された標識を撮影した画像データに基づき、標識の配置が特定される(S333)。第一模様と第二模様の相対的配置と標識の配置とに基づき、第二模様の配置が設定される(S334)。
(もっと読む)
刺繍機
【課題】 糸切れの発生時に、上糸が切れているか、下糸が切れているかを安定して判別することができ、オペレータの負担を軽減できるようにする。
【解決手段】 糸切れセンサ16により糸切れの発生を検出したときに、ジャンプ機構27によりミシン針25のジャンプ制御を行いつつ、主軸9の回転を減速させる。主軸9が基準位置まで回転すると、糸繰出し制御を開始して前記ジャンプ制御を解除し、この状態で上糸掛機構35を作動させて刺繍糸Sの先端側を上糸掛片39に巻き掛けるようにする。下糸切れの場合、天秤23の駆動に伴う刺繍糸Sの繰出しを糸切れセンサ16により検出できる。上糸切れの場合は、上糸掛機構35を用いた刺繍糸Sの繰出しが行われないので、糸切れセンサ16の糸車18が回転することはなく、糸切れセンサ16により上糸切れを検出できる。
(もっと読む)
ミシン及びミシンの制御方法
【課題】主軸と布送り機構を別のモータで駆動する場合に、主軸と布送り機構の同期が乱れた状態で縫製を行うことを防止できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、主軸を駆動するメインモータと布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S51、S56)。ミシンは、メインモータの回転角と布送りモータの回転角が同期するように2つのモータを駆動する。ミシンは、メインモータの回転角に対応して布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から算出する(S57)。ミシンは、算出した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S58)。算出した偏差が閾値よりも大きい場合(S59:NO)、ミシンは2つのモータが同期していないことを報知する(S61)。
(もっと読む)
1 - 20 / 413
[ Back to top ]