
Fターム[3B201AB56]の内容
液体又は蒸気による洗浄 (28,239) | 被清浄物の取扱い (3,618) | 被清浄物を搬入しない (545) | 自走式 (30)
Fターム[3B201AB56]に分類される特許
1 - 20 / 30
ウォータージェット治具
水中清掃ロボット
【課題】本発明は、魚網等の清掃対象物表面を広範囲において効率よく清掃できるようにした場合であっても、清掃対象物表面の凹凸や撓みに対して安定した走行が可能となるようにする。
【解決手段】本発明の水中清掃ロボット1は、清掃ノズルユニット5が、前記ロボット本体2の下部に回転自在に設けられ、前記ロボット本体を移動させる走行装置3が設けられている。前記走行装置3は、前記ロボット本体の左右に設けられた第1走行手段36a、37a、38a、39aと、前記第1走行手段の前後方向にそれぞれ設けられ且つ前記第1走行手段の下端よりも上方に位置している第2走行手段36b、37b、38b、39bとを備えている。
(もっと読む)
高圧洗浄装置の操作盤および高圧洗浄車の操作盤

【課題】離れた位置でも高圧洗浄装置を操作することが可能な操作盤の提供。
【解決手段】フレーム上に搭載され、洗浄水を貯留する水タンクと、水タンクに吸引側が接続され、エンジンにより駆動される水ポンプと、水ポンプの吐出側に一端が接続され、他端が大ホースリールおよび小ホースリールに接続された配管と、大ホースリールおよび小ホースリールにそれぞれの基端が接続されて巻き付けられた大ホースおよび小ホースの先端にそれぞれ噴射器具を備えた高圧洗浄装置の操作盤4であって、水ポンプにより圧送される洗浄水を噴出するホースを大ホースまたは小ホースに切り換える大小ホース切換スイッチ20と、大ホースリールの回転速度調整ハンドル21とを備えた操作盤本体4aと、操作盤本体4aに着脱可能であり、大ホースリールから大ホースを巻取、停止および繰出可能なスイッチ33と、エンジンの増減速スイッチ32とを備えたリモコン装置4bとを含む。
(もっと読む)
高圧洗浄装置およびこれを備えた高圧洗浄車
【課題】複数の噴射装置を同時に使用可能とした高圧洗浄装置およびこれを備えた高圧洗浄車の提供。
【解決手段】一端が水ポンプ14の吐出側に接続された少なくとも第1水流路および第2水流路と、第1水流路の他端に接続された洗浄ノズル2bと、第2水流路の他端に接続された洗浄ガン3bと、洗浄ノズル2bに対する洗浄水の供給の有無を切り換える大ホース開閉弁28と、洗浄ガン3bに対する洗浄水の供給の有無を切り換える小ホース開閉弁29と、大ホース開閉弁29を開閉動作させるエアシリンダ54を動作させる第1電気回路と、小ホース開閉弁29を開閉動作させるエアシリンダ55を動作させる第2電気回路と、第1電気回路および第2電気回路のいずれか一方または両方に通電することにより、大ホース開閉弁28および小ホース開閉弁29のいずれか一方または両方を開状態に切り換える大小ホースリール切換スイッチとを含む。
(もっと読む)
高圧洗浄装置およびこれを搭載した高圧洗浄車
【課題】洗浄作業時の燃料消費量を低減すること。
【解決手段】水ポンプを回転駆動するエンジン30、高圧水の流れを検出するフローセンサ34、エンジン30の回転数を設定するアクセルレバー35、アクセルレバー35の高圧水の噴射位置を検出する近接センサ38、エンジン30の回転数の通常モードとオートアクセルモードを切り換えるモード切換スイッチ37、モード切換スイッチ37がオートアクセルモードに切り換えられ、近接センサ38によりアクセルレバー35の高圧水の噴射位置が検出された状態で、フローセンサ34により高圧水の流れを検出したときは、エンジン30の回転数をアクセルレバー35により設定された回転数とし、フローセンサ34により高圧水の流れを検出しないとき、または近接センサ38によりアクセルレバー35の高圧水の噴射位置が検出されないときは、エンジン30の回転数をアイドル回転数とするアクセル制御装置33を有する。
(もっと読む)
トイレ洗浄装置
【課題】便器の清掃の省力化に貢献し清掃の品質を均一化するためのトイレ洗浄装置を提供する。
【解決手段】トイレの男子用便器の清掃作業を補助する為のトイレ洗浄装置が、便器に対して移動可能に構成されたトイレ洗浄装置本体と、便器に付けるICチップ等の無線発信機器とを有し、トイレ洗浄装置本体には、高圧水の発生装置と高圧水を射出する為のノズルが配設され、前記ノズルを便器の長さに合わせ上下させる駆動装置を備え、前記ICチップ等の無線発信機器は便器近傍に付着され、該便器の情報やトイレ内の情報を記憶させ、トイレ洗浄装置本体には、無線機器からの情報を読み取る為の装置を備え、読み取った便器の情報に基づき前記ノズルを上下させるべく駆動装置を制御し、便器の大きさや形状に合わせた駆動範囲を変更し、読み取ったトイレ内の情報を隣の便器に移動する際に利用する。
(もっと読む)
コンクリート壁面の表面研掃処理装置
【課題】水道水等を貯留する貯水槽の広大な面積の垂直なコンクリート壁面に対して、ウォータージェットによる研掃を効率良く行えるようにする表面研掃処理装置を提供する。
【解決手段】表面研掃処理装置10は、ベースマシン14と、縦方向スライドガイド部16と、横方向スライドガイド部19と、ウォータージェット噴射ノズル11を備えるウォータージェット治具13とを含んで構成される。ベースマシン14は、基台部23と走行部22とからなる。縦方向スライドガイド部16は、基台部23上の支持架台21に固定される縦方向固定ガイド部17と、縦方向固定ガイド部17に沿って昇降可能な昇降ガイド部18とからなる。横方向スライドガイド部19は、ウォータージェット治具13の横巾の略3倍の長さを有し、昇降ガイド部18に沿って昇降可能である。ウォータージェット治具13は、横方向スライドガイド部19に沿って横方向に移動可能である。
(もっと読む)
コンクリート壁面の表面処理方法
【課題】水道水等を貯留する貯水槽の広大な面積の垂直なコンクリート壁面に対して、ウォータージェットによる研掃を効率良く行えるようにする表面処理方法を提供する。
【解決手段】噴射ノズル11がカバー体12の内部に設けられたウォータージェット治具13を壁面10に沿ってスライド移動させてコンクリート壁面10の研掃を行う表面処理方法であって、ウォータージェット治具13は、横方向スライドガイド部15に沿って左右方向にスライド移動する。横方向スライドガイド部15は、ベースマシン14に設けられた縦方向スライドガイド部16に沿って上下方向にスライド移動する。ウォータージェット噴射ノズル11をコンクリート壁面10に対向させてベースマシン14を据付た後に、ウォータージェット治具13を一定速度で上下左右に移動させて、カバー体12の3倍の研掃巾で、コンクリート壁面10の下端部から上端部に至る領域の研掃を行なう。
(もっと読む)
高圧洗浄車
【課題】高圧洗浄車において、簡単な構成で操作性を向上させながら、ホースリール操作レバーの誤動作を防止する。
【解決手段】第1油圧モータを流量制御機構を備えた方向切換弁に接続し、この方向切換弁に接続されたホースリール操作レバー17を操作することで、回転方向及び回転速度を制御可能に構成する。ホースリール操作レバー17を、第1直線部90aと、この第1直線部90aの中間の中立位置に連続して第1直線部90aに垂直な第1垂直部90bとを有する操作盤表面50aの第1ガイド孔90内に配置し、第1引張コイルバネによって第1垂直部90bに沿って第1直線部90aから離れる方向へ付勢する。
(もっと読む)
ソーラーパネル清掃装置
【課題】ソーラーパネルの大きさ、形状にとらわれず、設置が容易で、ソーラーパネルの電力変換効率を低下させることも無く、しかも軽量で、屋根に負担をかけない、使用勝手の良いソーラーパネル清掃装置を提供する。
【解決手段】ソーラーパネル1上で本体2aを自走させる4足歩行手段4と、ソーラーパネル1の大きさや形状を認識するための超音波センサー25と、ソーラーパネル1の表面を清掃する回転ブラシ5と、4足歩行手段4を駆動するための電源装置7と、超音波センサー25の出力に基づき、本体2aが順次走行するよう4足歩行手段4を制御する制御手段8を備えたもので、ソーラーパネル1の周囲に大掛かりなガイド部材は不要で、ソーラーパネル清掃装置2をソーラーパネル1上に置くだけで、自動でソーラーパネル1の大きさ、形状を認識しながら移動を繰り返しソーラーパネル1の全域を清掃することができる。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】 太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡などの板状部材を、作業性が高く、かつ経済的に清掃するための清掃ロボットシステム及びその制御方法を提供する。
【解決手段】 太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材4a、4bを清掃する清掃ロボットシステム1であって、清掃の対象となる前記板状部材4上を走行する機能と清掃する機能を有した多数の清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bへ移動させる搬送機能を有しているアレンジロボット3とを備えており、前記清掃ロボット2が、前記板状部材4に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数の前記アレンジロボット3が協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材4を清掃する。
(もっと読む)
現場対応型の海中ネットクリーニング及び検査装置
【課題】
本発明は、改良された海中ネットのためのネットクリーナーを提供する。
【解決手段】
現場対応型の海中ネットクリーナーであって、ネット(2)の表面を自在に移動する滑走シャーシ(1)と、ネットクリーナーに浮力を与えるために滑走シャーシ(1)に設置された浮力手段(3)と、ネットクリーナーをネット(2)の表面と絡めて動作させる駆動手段(4)と、ネットクリーナーをネット(2)の表面に押し付けて接触状態を維持させる推進手段(5)と、ネット(2)の表面から海中汚濁物を剥ぎ取るクリーニング手段(6)とを含んで構成されており、海中のネット(2)をクリーニングするものである。
(もっと読む)
液中作業装置及び液中作業方法
【課題】貯蔵プールの水中で、狭隘部や障害物があっても、目的とする部位の各種作業を遠隔地点から行うことにある。
【解決手段】水中を航行する遠隔操縦式移動体であるROV6,17,26に電動ウインチ8と空気袋6bに接続された吸着パッド6aや、内視鏡カメラ22やサンプリングヘッド29を装備させ、それらを貯蔵プール1の外側から操作卓13等で操縦して、容器2を吸着パッド6aで吸着保持して検査個所から移動させる作業や、内視鏡カメラ22を用いてその移動跡での観察作業を行ったり、サンプリングヘッドで貯蔵プール壁面に付着した物質の採取作業を行ったりする。
(もっと読む)
水面下の表面を洗浄する方法および洗浄設備
フレーム構造の形態の洗浄ツールにより水面下にある表面から付着物を剥がして取り除くための方法であって、洗浄ツールは、表面に対して作用する多数の洗浄装置を有するとともに付着物を剥がして表面を洗浄するために水状の洗浄流体を噴射するように構成され、洗浄装置がそれぞれ同時に回転するとともに、流体と付着物との混合物を更なる処理のために搬送する、方法において、洗浄装置は、それぞれカップの形態からなり、かつカップは、カップの縁部(41)の周りで一体化された噴射ノズル(60)に対して流体を供給するように一体化された流路と、流体および付着物を吸入するためにカップの頂部にある中心出口とを有しており、洗浄は、カップの縁部が表面(10)からある距離(A)にあるようにフレーム構造を表面に配置し、カップの出口(43)において吸引(流体の動的な負圧)を実行し、吸引は、カップの縁部(41)の下方から周囲の水(68)をカップの内側にかつ出口(43)へと引き入れることに寄与し、流体をノズル(60)から噴射して、カップを回転させつつ表面から付着物を剥がし、付着物と水との混合物を、カップの中心およびすでに確立している吸引が最も強いカップの内部の頂部へ向かう水流に流入させ、かつ付着物と水との混合物を更なる処理(220)のために搬送する、ように実行されることを特徴とする方法が記載されている。さらに、洗浄を実施する洗浄装置の2つの実施形態およびそれらの異なる用途が記載されている。  (もっと読む)
(もっと読む)
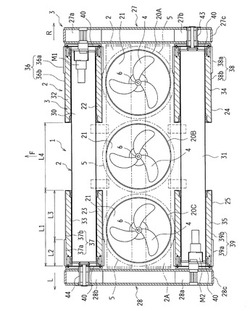
水中清掃ロボット
【課題】本発明は、養殖魚網等の清掃対象物表面に沿って、水面に向かう際や、照明を点灯させた際の逆光によりコンパスが目視し難くなるという不具合を解消することを課題とする。
【解決手段】水中に存在する清掃対象物N表面に沿って移動するロボット本体2と、該ロボット本体内に設けられ、清掃対象物表面に向かって高圧水を噴射して清掃対象物を清掃する清掃ノズルユニット3とを備えた水中清掃ロボットである。前記ロボット本体には、ロボット本体の前方を撮像する水中カメラ70と、該水中カメラの視野範囲内に配置され且つ方位を示すコンパス80とが設けられ、少なくともコンパスの方位を表示する芯が透明に構成され、前記水中カメラで撮像された画像を、前記ロボット本体と離間した位置に配置されたモニター装置75の画面75aに、コンパスとともに映し出すことにある。
(もっと読む)
水中清掃ロボット
【課題】本発明は、水中清掃ロボットを昇降させる際に、水中清掃ロボットを垂直に傾くことなく略水平に吊り下げることができ、この結果、人的補助が不要で且つ安全に昇降することができる水中清掃ロボットを提供することを課題とする。
【解決手段】水中に存在する清掃対象物表面に沿って移動するロボット本体2と、該ロボット本体内に設けられ、清掃対象物表面に向かって高圧水を噴射して清掃対象物を清掃する清掃ノズルユニット3とを備えた水中清掃ロボットにおいて、前記ロボット本体には、ロープ等の昇降手段65に着脱自在に連結される係止部64を有する昇降用取手6が設けられ、該昇降用取手は、前記係止部64が、前記ロボット本体の上方に位置してロボット本体を昇降可能な吊下姿勢Aと、前記連結部が吊下姿勢Aよりも前記ロボット本体側に移動する収納姿勢Bとに位置変更自在に設けられ、前記昇降用取手を収納姿勢に付勢する付勢手段67が設けられていることにある。
(もっと読む)
水中清掃ロボットおよび補助洗浄作業機
【課題】本発明は、水中清掃ロボットの清掃面積を大きくして、清掃対象物の清掃効率を向上させることができることを課題とする。
【解決手段】水中に存在する清掃対象物表面に沿って移動するロボット本体2と、該ロボット本体内に設けられ、清掃対象物表面に向かって高圧水を噴射して清掃対象物を清掃する清掃ノズルユニット3とを備えた水中清掃ロボットにおいて、前記ロボット本体には補助洗浄作業機70が装着され、該補助洗浄作業機は、作業機本体71に回転自在に設けられた回転軸76と、該回転軸の下部に設けられ高圧水を噴射するとともに、清掃対象物表面に対する高圧水の噴射反力により、回転軸と一体回転して清掃対象物を清掃する清掃ノズルユニット72と、前記回転軸の上部に設けられ回転軸の回転に伴って回転して、作業機本体を清掃対象物表面に向かって押し付けるための力を発生するプロペラ73とを備えている。
(もっと読む)
高圧洗浄車および高圧洗浄車の水流路切換方法
【課題】高圧洗浄車において、オーバーフロー不能な状態でのタンク内への給水を防止することにある。また、オーバーフロー不能な状態でのタンク内への給水を防止可能な高圧洗浄車の水流路切換方法を提案する。
【解決手段】高圧洗浄車1は、タンク11と、タンク11に接続された給水管75と、洗浄水を導入する導入口87を有する導入管77と、タンク11に接続されたオーバーフロー管76と、洗浄水を排出する排出口88を有する排出管78と、を備えている。また、高圧洗浄車1は、給水管75と導入管77との連通状態およびオーバーフロー管76と排出管78との連通状態を解除すると共に、給水管75とオーバーフロー管76とを連通させる第1の状態と、給水管75と導入管77とを連通させると共に、オーバーフロー管76と排出管78とを連通させる第2の状態と、に切り換えられる様に構成された四方弁79を備えている。
(もっと読む)
噴射装置
【課題】作業空間内の視界を向上すると共に、作業空間外への水の流出を防止できる噴射装置を提供する。
【解決手段】構造物の表面に水を噴射する噴射装置Aにおいて、前記水に粉状の高吸水性高分子を混合して噴射する。噴射装置Aは、前記水が圧送される第1配管21と、前記高吸水性高分子が圧送される第2配管22と、前記第1配管から供給される前記水と前記第2配管から供給される高吸水性高分子とを混合して噴射するノズル10とを備える。
(もっと読む)
処理システム
【課題】水又は懸濁水の噴射により構造物に付着したアスベスト含有物を剥離するにあたり、作業空間内の視界を向上すると共に、剥離されたアスベスト含有物を効果的に回収し得る処理システムを提供すること。
【解決手段】構造物に付着したアスベスト含有物に水又は懸濁水を噴射し、当該アスベスト含有物を剥離する噴射ノズルと、剥離された前記アスベスト含有物が投入されるホッパと、前記アスベスト含有物を袋体に収納する収納手段と、前記ホッパに投入された前記アスベスト含有物を前記収納手段へ圧送する圧送手段と、を備えた処理システムにおいて、前記噴射ノズルによる前記水又は懸濁水の噴射により作業空間内に浮遊する浮遊物を吸引する吸引口を有する吸引部材を備え、前記圧送手段は、前記吸引部材を介して前記浮遊物を吸引して前記収納手段へ圧送することを特徴とする。
(もっと読む)
1 - 20 / 30
[ Back to top ]