
Fターム[3C007AS11]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 溶接、溶断 (253)
Fターム[3C007AS11]に分類される特許
81 - 100 / 253
部品位置決め方法および部品位置決め用治具
【課題】所定の位置に対する部品の位置決めについて、装置構成の大型化や複雑化を招くことなく、十分な部品位置保持力および部品位置精度を得ることができる部品位置決め方法を提供する。
【解決手段】所定の位置に対する位置決め対象である部品(ワーク1)を、ロボット10に支持された状態で所定の範囲内で移動可能に設けられる移動治具(部品基準治具20)に固定した状態で支持し、部品基準治具20を移動させることにより、ワーク1の位置決めを行う部品位置決め方法であって、前記所定の位置に対して固定された状態で設けられる固定治具(サポート治具30)を用い、部品基準治具20およびサポート治具30のそれぞれに、互いに嵌合した状態で部品基準治具20をサポート治具30に対して所定の精度で位置決めする嵌合部(位置決めピン25、位置決め穴部35)を設け、これら嵌合部同士が嵌合した状態で、ワーク1の位置決めを行う。
(もっと読む)
ロボットの干渉回避方法及びロボットシステム

【課題】ロボットと障害物との干渉を確実に回避しつつ、所定の作業を確実に行う。
【解決手段】この干渉回避方法は、開始位置での干渉チェックを行うステップと、干渉があればロボット2が存在すべき領域を決定するステップと、ロボット2の各部位を代表する対象点がロボット2の存在すべき領域内にあるかをチェックするステップと、領域の内側にある部分は、領域の境界から離れかつ境界に近いほど大きい移動ベクトルを与え、外側にある部分は、領域内に向かいかつ領域内にある時よりも大きい移動ベクトルをそれぞれ与えるステップと、移動ベクトルを合成した合成ベクトルを用いてロボット2の回避位置・姿勢を求めるステップとを繰返し行い、干渉しない経路を設定する。
(もっと読む)
ロボット走行台車の移動経路の決定方法及びその決定方法を実施可能なロボットシステム
【課題】ワーク上に設定された作業部位に対して作業を行うロボットを搭載したロボット走行台車の適切な移動経路を自動的に決定し、決定作業の効率及びワークに対してロボットが行う作業結果の品質を向上させる。
【解決手段】ワーク上に設定された作業部位に対して作業を行うロボットを搭載したロボット走行台車の移動経路の決定方法において、ワーク上の作業部位に対応して移動するロボット走行台車の移動経路と、この移動経路でのロボットの動作を予め設定する初期設定工程P1と、初期設定工程P1で設定された移動経路におけるロボット走行台車の移動速度Vsが所定の速度を超える際に、当該移動経路を変更すると共に変更された移動経路でのロボットの動作を再設定する再設定工程P2と、を備えている。
(もっと読む)
オフライン教示データの作成方法及びロボットシステム
【課題】ロボット、特に当該ロボットを搭載したスライダの適切な教示データを自動的かつ効率的に作成する。
【解決手段】ロボットの据付ベースを移動させるスライダを動作させながらワークに対して連続した作業を行なうロボットシステムにおいてスライダ位置を決定する方法は、初期位置等を設定するステップ(S100〜S103)と、ロボット原点を通る探索平面内にて離散的に設定された格子点が、ワーク上の作業位置に合致するようにスライダの位置を設定して、そのスライダの位置における各格子点の評価値を算出するステップ(S106)と、評価値が最高値である格子点が溶接点になるように、スライダの位置を決定するステップ(S109)とを含む。探索平面は作業位置を中心として回転させることで、最適なスライダの位置を設定できる。
(もっと読む)
可動部のハーネスレス装置
【課題】より優れた信頼性と耐久性をもって電気信号の伝送を行なうことの出来る、新規な構造の可動部のハーネスレス装置を提供すること。
【解決手段】部分コア部材40を円周上で相互に離隔して複数配置して形成した第一のコア部材36を第一の部材22に取り付ける一方、該部分コア部材40の周方向離隔距離の最大値よりも大きい周方向長さを有する第二のコア部材62を該第一の部材22に対して回動軸26回りに回動可能に取り付けられた第二の部材24に取り付けて、該第一のコア部材36と該第二のコア部材62を該回動軸26の軸方向で所定距離を隔てて該回動軸26回りで相対回動可能にすると共に、該第二のコア部材62が何れの周方向位置においても複数の該部分コア部材40の少なくとも一つに対して対向状態とされるようにした。
(もっと読む)
アーク溶接用ロボット
【課題】一定以上の曲げ半径を有しつつ、アーム動作によって不都合な応力を受けないように引き回された溶接ワイヤ用コンジットを備えたアーク溶接用ロボットを提供する。
【解決手段】溶接ワイヤ用コンジット56は、ロボット架台14の後部から架台の貫通穴70を通り、架台に設けられた第2支持部材96によって支持され、旋回胴26の前方を通過し、必要な最小曲げ半径を有した状態で、その途中部分が旋回胴26の上部の第1支持部材72に支持されている。第1支持部材72を通過したコンジット56は、上腕30の後方に回り込み、ワイヤ送給装置52の後部のコネクタ74に、必要な最小曲げ半径を有した状態で接続されており、全体としてS字状に引き回される。
(もっと読む)
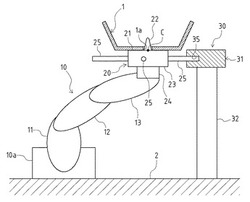
溶接ロボット
【課題】トーチケーブルの湾曲半径を大きく取ることができ、トーチケーブルのストレス軽減、ケーブル耐久性の向上を図ることができるとともに、ワイヤ送給時の送給抵抗が軽減されて安定した送給ができ、溶接への悪影響を抑制できる溶接ロボットを提供する。
【解決手段】
ワイヤ送給装置30は、溶接ロボット10の傾動台15に対して、支持部15aよりも、基端側寄りの位置に設けられることにより、回転軸線16からオフセットして、取付けられている。ワイヤ送給装置30のワイヤ送出口42と溶接用トーチ19間に接続されたトーチケーブル50はワイヤ送出口42から延出された部位が、アッパアーム14の軸部を通過しないように、該軸部よりもアッパアーム14の先端側に向けて延出されるとともに、回転軸線16に交差するように配置されている。
(もっと読む)
ロボットシステム
【課題】大サイズのワークを複数のロボットによって支持しても、所望の作業軌跡に沿った加工作業を行うことができるロボットシステムを提供にする。
【解決手段】ワークを工具で加工する加工装置と、加工制御装置と、ワーク把持用ハンドを備えた複数のロボットと、加工制御装置および複数ロボットを制御するロボット制御装置とを備え、複数ロボットによってワークを移動させながら工具でワーク上の目標加工線に沿って加工を行うロボットシステムにおいて、ハンド先端を原点とするツール座標系における目標加工線に対応する基準点の移動軌跡を演算周期毎に求め、第1ロボットのハンド先端位置を演算して、第1ロボットのハンド先端位置をその位置へ移動させ、第2ロボットのハンド先端位置が第1ロボットのハンド先端位置と相対的な位置関係を一定に保って工具の軌跡が目標加工線と一致するようにワークを工具に対して移動させるようにした。
(もっと読む)
ロボットの制御方法及びロボット制御装置
【課題】
関節の移動量に応じて到達可能な速度を仮速度パターンで予測し、予測された到達速度に応じて設計寿命を遵守できる適切な加減速度を自動的に設定するロボットの制御方法及びロボット制御装置を提供する。
【解決手段】
S20,S30で関節の運動が最高速度に到達する場合の寿命計算を基に決定された加減速度と、移動量及び最高速度に基づき到達速度、加速時間等を含む仮速度パターンを生成する。S40,S50で、仮速度パターンの到達速度が、最高速度に比して小さい場合、速度パターンに関する平均トルク及び平均速度に基づき仮速度パターンにおける寿命を算出する。寿命が製品寿命と等価でない場合には三角形速度パターンでの加減速度を所定量増加して仮速度パターンを再生成し、再生成した速度パターンに関して、S50の処理に戻り、S60で寿命が製品寿命と等価でない場合に、S70,S80,S50,S60を繰り返す。
(もっと読む)
多関節ロボットのティーチングデータ検証方法
【課題】新たに作成した多関節ロボットのティーチングデータについて効率的に検証を行う。
【解決手段】多関節ロボットのティーチングデータ検証方法では、第1車両100において複数の作業点Pnに対する多関節ロボット12の新たな第1ティーチングデータ104を、第2車両102において複数の作業点Qnに対する既存の第2ティーチングデータ106に基づいて検証をする。第1ティーチングデータ104における所定の作業点Pnを比較対象データとして、対応する第2ティーチングデータ106における作業点Qnのデータを比較基準データとし、それぞれの作業点Pn、Qnの位置データの位置差分ΔAと、該作業点に対して作業をする電極22a、22bの角度データの角度差分ΔBとを求める。位置差分ΔA及び角度差分ΔBに基づいて、比較対象データについて異なる種別の検証を行い又は検証を省略する。
(もっと読む)
ロボットオフラインプログラミング装置
【課題】最適な情報を含むロボットのプログラムを短時間で作成する。
【解決手段】各ロボット(11、12)のプログラムを作成するロボットオフラインプログラミング装置(20)は、第一車体(A)においてスポット溶接が行われる打点の打点位置情報(33)、打点順序情報(34)および打点配分情報(35)を記憶する第一記憶手段(32)と、を含み、打点配分情報においては、スポット溶接の打点のそれぞれに対してロボットの一つが配分されており、さらに、第二車体(B)においてスポット溶接が行われる打点のスポット溶接の打点位置情報を記憶する第二記憶手段(42)と、第一車体の打点位置情報および打点順序情報と第二車体の打点位置情報とに基づいて第二車体の打点順序情報および打点配分情報を決定する決定手段(22)と、第二車体の打点位置情報、打点順序情報および打点配分情報に基づいて第二車体をスポット溶接するための各ロボットのプログラムを作成する作成手段(23)とを含む。
(もっと読む)
計測装置を用いてロボットの位置教示を行うロボット制御装置
【課題】計測装置のキャリブレーションの必要なしに、ロボットと作業対象とを所望の相対位置関係に移動して教示位置の修正を自動的に行うことを可能にする。
【解決手段】ロボット14と基準標的とを所定の相対位置関係に配置したときの計測装置12からの出力情報を基準標的情報記憶部18に記憶し、ロボットと基準標的とが所定の相対位置関係に配置された状態から計測装置を所定移動量だけ移動させたときの計測装置からの出力情報の変化量を移動量と対応させて出力変化量記憶部24に記憶し、作業対象物上に設けられた指定標的を計測したときの計測装置の出力情報と基準標的情報記憶部に記憶された出力情報との誤差が許容範囲以内になるまで、出力変化量記憶部24に記憶された移動量と出力変化量との関係に基づいて、ロボットを移動させ、誤差が許容範囲以内になったときにロボットの基準点の位置を教示点として記憶する。
(もっと読む)
ロボット制御装置
【課題】位置ずれ検出動作において接触検出後のロボット停止動作を滑らかにする。
【解決手段】ロボットRに取り付けられた作業ツールTによってワークWの位置ずれを検出するための指令位置を算出する指令位置生成部2と、指令位置に基づいて作業ツールTを移動させる駆動制御部3と、作業ツールTがワークWへ接触したことを検出して停止信号Tsを出力する停止処理部8と、作業ツールTがワークWへ接触したときの接触位置Dvを記憶する接触位置算出部7と、位置ずれ量を算出して教示データTdを補正する位置補正部9と、を備える。停止信号Tsの入力により、駆動制御部3が認識している作業ツールTの現在位置を接触位置Dv、指令位置生成部2が出力している指令位置を惰走位置Svとして作業ツールTを惰走位置Svから接触位置Dvへ逆送させる惰走距離補正経路を算出し、本来の接触位置Dvで停止する。
(もっと読む)
ロボットの教示方法
【課題】ロボットとポジショナの同期を行う溶接等の作業の教示において、適切なポジショナ同期の教示点を自動的に作成する。
【解決手段】ポジショナ2の動作開始位置から動作終了位置までの動作時間を予め求めるポジショナ2の動作を含む区間におけるワーク100に対する作業速度からポジショナ動作に要するワーク100に対する作業軌跡の長さを求める(S2−5)。ポジショナ2の動作開始位置から前記動作終了位置までのワーク100に対する作業軌跡の長さが、ポジショナ動作に要する作業軌跡の長さ以上となるような連動開始位置及び連動終了位置を設定する(S2−6)。
(もっと読む)
ワイヤ送給装置
【課題】アームを軸周りに回転させたときに、アーム内を通過しているトーチケーブルの捩れを防ぐことができるワイヤ送給装置を提供することを課題とする。
【解決手段】トーチケーブル2が上部アームR3内を軸方向に通過している溶接ロボットにおいて、トーチケーブル2内の溶接ワイヤ3を送給するワイヤ送給装置1であって、上部アームR3の軸周りに回転自在な状態で、上部アームR3の内周面に取り付けられるとともに、トーチケーブル2が取り付けられている本体部材20と、上部アームR3の軸方向と直交する軸周りに回転自在な状態で、本体部材20に取り付けられた送りローラ30と、を備え、トーチケーブル2から露出した溶接ワイヤ3が、送りローラ30の周面31に接触しており、送りローラ30が回転することで、溶接ワイヤ3が上部アームR3の軸方向に送り出されることを特徴としている。
(もっと読む)
多関節ロボットの測定姿勢ティーチング方法とティーチング治具
【課題】 光学系センサを用いてワークを測定する多関節ロボットに、測定姿勢を正確に教示することができる技術を提供する。
【解決手段】 多関節ロボット10にロッド部38を有するティーチングツール24を装着し、ロッド部38の先端に設けられる先端具50がワーク26の測定位置に接触するように、多関節ロボット10を動作させ、そのときの多関節ロボット10の姿勢を多関節ロボット10に記憶させることで、光学系センサを装着してワーク26を測定する際の測定姿勢を多関節ロボット10に教示する。多関節ロボット10に装着されたティーチングツール24のロッド部38は、多関節ロボット10に装着される光学系センサの測定軸に沿って伸びるとともに、先端具50は、多関節ロボット10に装着される光学系センサの測定距離範囲内に位置している。
(もっと読む)
ツール取替装置
【課題】ツールの衝突等を検知することができ、電力の供給が停止しても、ツールを保持することができ、かつ、ツールの着脱が容易であって、ツールを移動させるロボットアームの動作の正確性を高めることができるツール取替装置を提供することを課題とする。
【解決手段】本発明は、ケース部材10を有するツール取替1であり、ケース10部材内において、保持部材20と可動部材30との間に支持された係合ボール29が、第2バネによって付勢される可動部材30に形成された押出面により、係合ボール29が保持部材20内に突出してツールが係合可能となる。
また、第2バネの付勢力に逆らって可動部材30を押圧することで、係合ボール29が可動部材30内に移動可能となることを特徴とする。また、ツールを保持する保持部材20の移動距離を検出するショックセンサ40を設けていることを特徴とする。
(もっと読む)
ロボットの動作余裕量演算表示方法及びその装置
【課題】ロボットの動作可能な領域をオペレータや生産ラインの現場作業者に対して直感的に認識できる態様で定量的に通知する。
【解決手段】ロボット1の教示プログラムに含まれる複数の教示点のそれぞれについて、ロボット1の位置姿勢を示す複数のパラメータのうちの1個又は複数個を変化させて、ロボット1の各関節θ1〜θ6の動作範囲内で教示点から連続して動作可能な領域を示す動作余裕量を計算する(ステップS2−2)。各教示点の動作余裕量を数値で定量的に表示する(ステップS2−3)。
(もっと読む)
多関節ロボット
【課題】多関節ロボットにおいて作業機に給電するケーブルが該作業機に当接することを防止する。
【解決手段】多関節ロボット10は、ロール回転する第6関節30と、第6関節30に接続された溶接ガン32と、一端が溶接ガン32に接続され、他端が第1支持部48に接続されたケーブル44と、溶接ガン32に接続され、第6関節30のロール軸Jを基準として径方向に張り出したフランジ42とを有する。フランジ42は、ロール軸Jを中心として、機構部40より大径であり、ケーブル44の一部を支持する第2支持部52を備える。第2支持部52は、ケーブル44をロール軸Jと略平行に支持する。第2支持部52は、ロール軸Jを基準としてC形状部材38と逆の位置に設けられている。
(もっと読む)
産業用ロボット
【課題】本発明は、ATCを使用する場合でも、複数個のツールを1個の電動モータで駆動することができ、さらに制御用信号の電気的なロボットコントローラとの接続を遮断することなく、タクトタイムの短縮を可能とする産業用ロボットを提供する。
【解決手段】手首軸1を含む複数の関節構造からなり、前記手首部1にオートツールチェンジャ2、4を備え、前記オートツールチェンジャ2、4によりツール5を取り替えるようにした産業用ロボットにおいて、前記手首部1に前記ツール5の動力を伝達する少なくとも1つのアクチュエータ13が備えられたものである。
(もっと読む)
81 - 100 / 253
[ Back to top ]