
Fターム[3C007AS11]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 溶接、溶断 (253)
Fターム[3C007AS11]に分類される特許
21 - 40 / 253
ロボットシステム
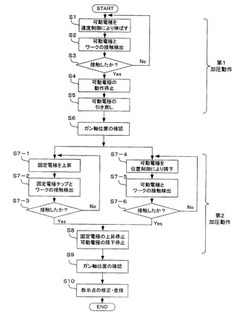
【課題】板厚が未知の場合であってもワークの撓みを抑えた状態でスポット溶接ロボットの溶接点教示位置を自動で修正し、溶接品質を向上させる。
【解決手段】ロボット1に溶接点位置を教示するに際し、可動電極21と固定電極22とによって溶接点を挟む位置にスポット溶接ガン2を移動させる第1の処理と、モータ駆動により可動電極21を被溶接部材Wに向けて伸ばし、モータへのトルク指令に基づいて可動電極21と被溶接部材Wとの接触を検出し、接触検出後に可動電極21の動作を停止させる第2の処理と、モータ駆動により可動電極21が被溶接部材Wと接触した状態を保ちながら、ロボット1を可動電極21側へ動作させて固定電極22を被溶接部材Wに接近させ、ロボット1の関節に作用する外乱トルクによって固定電極223被溶接部材Wとの接触を検出し、接触検出後にロボット1の動作を停止させる第3の処理 とを含む。
(もっと読む)
ツールパラメータ導出装置,ロボット

【課題】ロボットの多関節マニピュレータのアーム先端のフランジ面の回転中心に取り付けられたツールの並進成分の寸法を自動的に導出することのできるツールパラメータ導出制御装置及びこれを備えたロボットを提供すること。
【解決手段】3箇所以上の位置でツール11と平板治具50との接触がツール接触検出部40で検出されるまでのベース座標系BのZb軸方向の移動量を取得し,該移動量に基づいて平板治具50のベース座標系Bに対する傾きを算出する。そして,その傾きに基づいて平板治具50と平行及び垂直な作業座標系Wを設定し,作業座標系Wにおいてフランジ面12の回転中心Pを複数の位置姿勢に位置決めした状態でツール11と平板治具50との接触がツール接触検出部40で検出されるまでの作業座標系WのZ軸方向の移動量を取得し,該移動量に基づいてツール11の並進成分の寸法を導出する。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
自動溶接装置における溶接トーチ位置決め方法
【課題】 枝管が傾いていても、溶接個所に対する溶接トーチの角度を一定にする。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。枝管溶接機4の溶接トーチ11の先端より突出する溶接ワイヤ15の先端を、現実の空間の或る1点に保持してロボットのマスタリングを行い、枝管溶接機4について、その点を原点Oとし且つ溶接トーチ11の円周動作の軸心位置に座標軸を備えたツール座標系16を設定する。ツール座標系16における溶接トーチ11の円周動作の軸心位置に対応する座標軸を、センシングにより検出された母管1に仮付けした枝管2の鉛直方向からの傾きに一致させる座標変換を行った後、馬蹄型ガイド5を溶接対象の枝管2に外嵌させて、溶接トーチ11の円周動作の軸心方向を、枝管2の軸心方向に一致させる。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
ロボット教示システム
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
タッチセンシングプローブ
【課題】センシング精度の向上および利便性、コスト低減を図ったタッチセンシングプローブを提供する。
【解決手段】内部に通電用のコンタクトチップ1を有するノズル本体2と、ノズル本体2先端部にネジ式で着脱自在に取り付けられ、コンタクトチップ1と接触バネ5により電気的に接続される先端プローブ3とを備える。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
作業マニピュレータのセンシング動作生成方法及びセンシング動作生成装置
【課題】円弧部分を有する作業ワークであっても、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】本発明の作業マニピュレータのセンシング動作生成方法は、円弧部分Cを有する作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する際に好適なものである。センシング動作生成方法は、作業ワークWの円弧部分Cが離散点Dで近似された離散ワークモデルDMにもとづいて、離散点D間が補間されたリアルワークモデルRMを推定し、推定されたリアルワークモデルRMをもとに作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
ロボットの作業プログラム作成方法、ロボットの作業プログラム作成装置、及びロボット制御システム
【課題】位置及び姿勢の教示を厳密に行わなければならず、教示作業に非常に労力を要する。
【解決手段】教示モードでは、ラフ教示点であるセンシング点においてセンシング命令が入力される(S22)。この命令とセンシング点を記憶する(S23)。狙い角・前進後退角が入力される(S24)。センシングモードでは、センシング点にロボットを移動させ(S32)、レーザセンサを検出動作させてワーク形状を取得し(S33)、位置及び姿勢を算出して作業プログラムを作成する(S35)。ワークに位置ずれが発生しない環境下において教示作業を大幅に簡略化できる。
(もっと読む)
産業用ロボット
【課題】本発明は、揺動アームと、揺動アームに回転軸を介して取り付けられるツール取付回転アームとを備えた産業用ロボットに関し、ツール取付部に気体を供給する流通路の外部構造物への干渉を防止できる産業用ロボットを提供することを課題とする。
【解決手段】本発明は、ツール取付部170に駆動用の気体を供給する流通路200を、ロボットベース110から旋回フレーム120、チューブ220、ショルダ140、揺動アーム150、ツール取付回転アーム160の内部を通ってツール取付部170まで配置したことを特徴とする
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
産業用ロボット
【課題】産業用ロボットに関し、コンパクトな構造で、アームの回転軸からツール取付部までの距離を大きくとれ、かつ、ツール取付部を精度よく位置決めできる産業用ロボットを提供する。
【解決手段】揺動アーム150内でツール取付回転アーム駆動用モータ311の回転をツール取付回転アーム駆動用伝達機構300を介して揺動軸313に伝達し、ツール取付部駆動用モータ411の回転をツール取付部駆動用第1伝達機構412aを介して中間動力伝達軸422に伝達し、中間動力伝達軸422の回転をツール取付部駆動用第2伝達機構412bを介して出力動力伝達軸426に伝達し、ツール取付部駆動用減速ユニット413で減速してツール取付部170を回転する構成とした。
(もっと読む)
自動溶接方法及び装置
【課題】 母管に複数の枝管を溶接する溶接処理に要する時間を低減させる。
【解決手段】 母管1の長手方向に延びるガイドレール12に、多関節ロボット14に枝管溶接機4を備えた溶接モジュール13と、別の多関節ロボット16にセンサ装置17を備えたセンシングモジュール15を、独立に往復動可能に取り付ける。母管1に、複数の枝管2a〜2nを取り付ける場合は、母管1の長手方向一端側より他端側へ並ぶ各枝管2a〜2nについて、センシングモジュール15のセンサ装置17によるセンシング作業を順次行ない、それぞれの位置計測結果の情報を制御装置18に一旦記憶する。センシングモジュール15による溶接順序が後の枝管2b〜2nについてのセンシング作業と並行して、溶接モジュール13により、制御装置18より得た位置計測結果の情報を基に枝管溶接機4の位置を制御しながら各枝管2a〜2nの母管1への溶接作業を行わせる。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法
【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
レーザー加工表示装置及びこれを用いたロボットの教示方法
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
溶接装置
【課題】溶接ガンの姿勢変更の際に、ロボットの動作軌道や空間移動時間が短く、さらに、段取り作業時間を短縮可能な溶接装置の提供を目的とする。
【解決手段】多関節型のロボット1と、ロボット1の先端の手首関節部1aを介して取着されるガン取付アーム2と、を備え、ガン取付アーム2にスポット溶接用の溶接ガン3を水平軸心La廻りに揺動自在に枢着した。
(もっと読む)
21 - 40 / 253
[ Back to top ]