
Fターム[3C007AS21]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 土木、建築用 (16)
Fターム[3C007AS21]に分類される特許
1 - 16 / 16
双腕作業機械
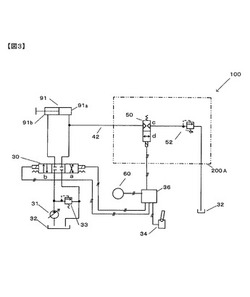
【課題】作業の安全を確保しつつ、作業フロント同士を干渉危険領域まで接近させた状態で作業を行うことを可能とする双腕作業機械を提供する。
【解決手段】干渉負荷軽減装置200Aは、電磁切換弁50とリリーフ弁52とを備える。電磁切換弁50は、スイング用油圧シリンダ91のボトム油室91aに接続され、通常、リリーフ弁52を遮断している。スイング用油圧シリンダ91により駆動される作業フロントが干渉危険領域に達すると、電磁切換弁が位置dに切り換わり、スイング用油圧シリンダ71とリリーフ弁52が連通する。リリーフ弁52は、予め設定された圧力以上となると圧油を作動油タンク32に解放する。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置

【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
作業機械の把持装置及びこれを備えた作業機械
【課題】大きな把持力による処理対象物の把持と、微細な把持力の調整との双方が可能な作業機械の把持装置およびこれを備えた作業機械を提供する。
【解決手段】把持装置20は、一対の把持部材30A,30Bを有する。その少なくとも一方は、把持部材本体32と、可動把持部34と、ばね部材36とを含む。可動把持部34は、処理対象物Pから受ける反力によって把持部材本体32に対しその回動の向きと逆の向きに相対的に所定量だけ後退変位することが可能となるように把持部材本体32に取付けられる。ばね部材36は、可動把持部34を内向きに付勢するためのもので、その弾性変形によって可動把持部34の後退変位を許容し、かつ、その弾発力により、処理対象物Pに対する可動把持部34の接触圧を増加させる。
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
4足歩行作業ロボット
【課題】 大きな凹凸がある路面60でも移動可能であって、作業時には4足歩行機構の全ての関節部を同時に固定できるため安定した作業が可能な4足歩行作業ロボット1を提供する。
【解決手段】 4つの脚機構(20,30,40,50)における関節部(21,22,23)等の角度を所定のタイミングで制御することによって移動可能な4足歩行機構を備えた下部移動体2と、当該下部移動体2の上部に搭載され作業用装置を備えた上部作業体3と、からなる4足歩行作業ロボットであって、前記下部移動体の4足歩行機構の脚機構(20,30,40,50)が関節部固定手段を備えており、当該関節部固定手段が前記上部作業体2により作業を行う際に前記4つの脚機構を接地した状態で下部移動体2を現在位置に維持するために必要な関節部の角度を固定可能とした。
(もっと読む)
多関節構造体、それを用いた装着具、システムおよびヒューマンマシンインターフェース
【課題】多関節構造体の長さを手動で任意に変更可能とする。
【解決手段】本発明の多関節構造体は、各関節間の連結部にポテンショメータ等の変化量検出センサが設けられ、1ないし複数のセンサをグループ単位とし、前記グループ単位に前記センサの信号が信号処理部に取り込まれ、前記信号処理部間は通信ネットワークに接続され、前記通信ネットワークに接続された処理演算部が、前記センサの信号データに基づいて演算処理する多関節構造体において、前記多関節構造体の形状が変形した際に、前記関節間の連結部の変化量をリアルタイムに検出し、前記関節の並進、回転移動した際の移動量及びベクトルを出力する構成とされる。
(もっと読む)
建設現場や、鉱山で使用する、片腕で扱える重量が1トン以上の5本指強力ロボットアーム。
【課題】重量を物取り扱う作業現場での、5本指を持つ人間の腕型ロボットを提供する。
【解決手段】以上の課題を解決するために、マスタースレーブ方式で制御する5本指強力ロボットアームを発明した。本発明を作業内容に適した任意の台座、又は台車に装着して活用する。この形態なら二足歩行時の重心が高くならないように、5本指強力ロボットアームを軽量化する必要性は高くない。5本指強力ロボットアームはアクティブサスペンション(脚)の技術をアーム部に使用したアクティブアクチュエーター(腕)を主たる動力源とする。アクティブサスペンションは、重さが50トン以上ある最新式の戦車の姿勢制御でも使用され始めており、十分な高出力と、耐久性がある。
(もっと読む)
双腕作業機械
【課題】左右の作業フロントの干渉による作業フロントの破損を防止することができる双腕作業機械を提供する。
【解決手段】運転室4を備えた上部旋回体3の前部に設けた左右のスイングポスト7a,bに、それぞれ上下に揺動自在に左右の作業フロントA,Bを設けた双腕作業機械において、作業フロントA,Bの角度差及び操作装置からの指令信号に基づき、スイングポスト7a,bを旋回動作させる出力信号を生成する干渉防止制御部を備え、この干渉防止制御部は、作業フロントA,Bが接触し得る角度差の範囲を干渉危険領域、この干渉危険領域に連続する設定の角度差の範囲を準干渉危険領域と定義した場合、作業フロントA,Bの角度差が準干渉危険領域にあって作業フロントA,Bが相対的に近付くとき、スイングポスト7a,bを旋回動作させる出力信号を減少させ他方の作業フロントに向かって旋回する作業フロントの旋回動作を減速させる。
(もっと読む)
壁面間移動装置
【課題】壁面間で保持されながら落下せずに移動することができる壁面間移動装置を提供する。
【解決手段】本発明の壁面間移動装置は、滑走子11が固定された滑走子体1と、滑走子体1を振幅させる駆動手段2と、滑走子体1及び駆動手段2を支持する移動体本体3と、移動体本体3を壁面と略平行に維持するとともに落下を防止するためのガイド手段4を備えている。かかる構成によれば、駆動手段2により滑走子体1を加振させて滑走子11を壁面に押圧することによって移動体本体3の推進力を得ることができる。
(もっと読む)
複数のレンガで建築物を建設するための自動レンガ積みシステム
複数のレンガ(16)で建築物を建設するための自動レンガ積みシステム(10)はレンガ積み/接着剤塗布ヘッド(18)と、計測システム(13)と、レンガ(16)を所定位置に積むためロボット(12)に制御データを提供する制御装置(14)を備えたロボット(12)を具備する。計測システム(13)はヘッド (18)の位置を実時間で測定し、制御装置(14)に位置情報を発生する。制御装置(14)は建設中の建築物の所定位置でレンガ(16)を積むため位置データとヘッド(18)の所定又は事前にプログラム化された位置間の比較に基いて制御データを発生する。生後装置(14)は、レンガ(16)が各所定位置で順次積載され、建築物全体の完成した段のレンガが次の段のレンガ積みの前に積載されるレンガ段毎に、建築物を建設するためにロボット(12)を制御できる。  (もっと読む)
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
施工支援方法及び施工支援システム
【課題】据付位置の提示からマーキングまでの自動化を可能とする。
【解決手段】施工現場における所定の施工対象に設置物を据付けるための据付位置を提示してマーキングする施工支援システムにおいて、設置物の据付け作業を行う施工現場の任意の位置に設置され、設計図面における据付位置の三次元座標である設計座標情報に基づいて該据付位置を視準して視準先を内蔵されたレーザポインタで提示すると共に提示位置を三次元計測する三次元計測器12と、施工現場に移動自在に配置され、三次元計測器12から転送された提示位置の三次元座標情報及び自分の位置情報に基づいて前記提示位置に移動して、該提示位置にスタンプ44で印をマーキングするマーキングロボット14と、を備えた。
(もっと読む)
4足歩行型法面作業ロボット
【課題】本発明は法面作業ロボット本体に働く重力を2本のワイヤー牽引で打ち消し、法面作業ロボット本体が自由に動けるようにするとともに、2本のワイヤーに必要以上の牽引力が作用するのを防止することができる4足歩行型法面作業ロボットを得るにある。
【解決手段】4足歩行型法面作業ロボット本体と、この法面作業ロボット本体を法面の異なる上部位置より吊り下げる一端部がそれぞれウインチに巻き取られた2本のワイヤーと、この2本のワイヤーに加わる張力をそれぞれ測定する2個のロードセルと、法面作業ロボット本体に働く重力を2本のワイヤーの牽引で打ち消し法面作業ロボット本体が自由に動けるように2個のロードセルに加えられる荷重を設定する制御装置とで4足歩行型法面作業ロボットを構成している。
(もっと読む)
建築物の外壁面作業装置
【課題】 作業工具の重量を担荷して作業者の負担を軽減できると共に工具を所望位置に容易に移動でき、また、工具ヘッドの移動による重心移動や慣性力も小さい建築物の外壁面作業装置を提供する。
【解決手段】 図示外壁面作業装置1は、固定基部10の背面支柱12の上端部にアーム駆動機構40によって駆動されるアーム機構30を備えて構成され、ゴンドラ装置2のゴンドラケージ2Aに、着脱可能に装着される。アーム機構30は、その先端の工具ヘッド50に工具ユニットを支持し、制御装置90によるアーム駆動機構40の制御駆動によって揺動操作されて、工具ユニットによって建築物の外壁面に対して穿孔やブラッシング等の作業を行うように構成されている。
(もっと読む)
可搬式自動加工装置
【課題】 既設構造物などに対して持ち運んで自動加工を行うことが出来るとともに、必要な精度を確保することができる可搬式自動加工装置を提供すること。
【解決手段】 加工基準点Oとこれから一定位置O’に加工用ロボット11を設置し、これを制御手段13に予め入力したプログラムで制御して加工を行うことで、可搬式の加工用ロボット11を用いて現場で自動加工を行うようにする。
容易にできるようにしている。
これにより、複雑な形状のスカラップ孔Fであっても自動加工することができ、高精度に加工でき、作業者の負担を大幅に軽減できるとともに、切削油などを使用することで、工具の寿命を延長し、効率良く短時間に加工することができる。
(もっと読む)
ロボットシステムを含む自動建設
一対のレール(1940)に摺動可能に装着された少なくとも2つの側部部材(1930)の間に延在し、それによって支持されるオーバーヘッド梁(1920)を含む可動ガントリーロボット(1910)を有するロボットシステム(1900)が、開示される。ノズルアセンブリ(1960)は、押し出すためにオーバーヘッド梁に可動式に結合される。 (もっと読む)
1 - 16 / 16
[ Back to top ]