
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
601 - 620 / 620
ロボット

【課題】 可搬質量が大きくかつ小型化が可能な搬送ロボットを提供することである。
【解決手段】 第2アーム38の他端部38bが上部リンク35に対して水平方向に離反した状態で、アーム姿勢維持手段60の当接体62が第2アーム38の他端部33bに当接する。アーム姿勢維持手段60の当接体62は、第2アーム38の姿勢を維持するために必要な力の一部を第2アーム38に与える。アーム姿勢維持手段60を用いることによって、小さい駆動力を出力する第2アーム駆動手段42を用いて、被搬送物31を基台33に対して水平方向に離反した位置に搬送することができる。このように小さい駆動力の第2アーム駆動手段42を用いても、可搬質量を大きくすることができるのでロボットを小型化することができる。
(もっと読む)
ロボットのアーム構造

【課題】 ロボットのアーム動作が制限される場合であっても、被搬送物を移動可能な範囲が大きい搬送ロボットのアーム構造を提供する。
【解決手段】 上部リンク35に第2アーム38が連結され、第2アーム38に第3アーム39が連結され、第3アーム39に第4アーム40が連結される。これによって基台33に対して第1アーム36が予め定める位置に維持された状態であっても、第2アーム38〜第4アーム40を角変位することによって、第4アーム40に装着される保持手段を広範囲に移動可能とすることができる。これによって被搬送物を移動可能な範囲を大きくすることができる。
(もっと読む)
ロボットの接触力検出装置
【課題】 簡単かつ信頼性の高い構成で、アームの任意の箇所に加えられた接触力を検出可能な、ロボットアームの接触力検出装置を提供する。
【解決手段】 ロボット本体1においては、ロボットアーム101の根元部のロボットベース102に力検出器103を設けて、ロボットアーム101に加わる力を検出する。制御装置2においては、接触力算出部250を設けて、ロボットアーム101に加わる力からロボットアーム101自身の動作による内力を差し引くことにより、ロボットアーム101に作用する接触力を算出し、また関節回避量算出部220を設けることにより、前記接触力を用いて接触力回避動作を算出し、さらに動作制御部230およびモータ制御部240を設けることにより、ロボットアーム101の接触力回避動作を実行させる。これにより、ロボット本体1の安全な動作を達成する。
(もっと読む)
把持装置および移載機
【課題】容器21が変形していても確実に把持できる把持装置13を提供する。
【解決手段】容器21の側面に当接して押さえる側面押え部39を設ける。容器21の上側周縁部で内周側に折り曲げられている折曲部27に係脱可能とするフック49を設ける。フック49を容器21の折曲部27に係合させて側面押え部39との間で把持する把持位置と、容器21の折曲部27から離反する把持解除位置との間で移動させるシリンダ47を設ける。側面押え部39が容器21の側面に当接して押さえ、フック49が容器21の折曲部27に係合し、これら側面押え部39とフック49との間で容器21が変形していても確実に把持する。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
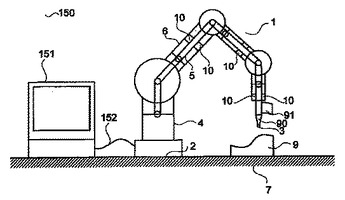
アーク溶接ロボットのトーチケーブル処理構造
【課題】 トーチケーブルの過剰な弛みや緊張と、ワイヤ送給装置による干渉発生を防止する。
【解決手段】 ロボット1の前腕基部10の先端に軸線Aの回りで回転可能に第1手首要素11が設けられ、同第1手首要素11に第2軸線Bの回りで回転可能に第2手首要素12が設けられ、第2手首要素12に伝動機構13を介して溶接トーチ2が軸線Bと略垂直で、且つ、軸線Aと所定距離隔てた線Cの回りで回転可能に支持される。ワイヤ送給装置4は前腕以外の箇所(載置台8上、上腕上、旋回胴上等)に設置される。トーチケーブル3は中途取付部3aで、第1軸線Aに略平行な方向に沿って可動に取付けられたスライダ6bに取付けられる。張力発生装置80につなげた線材81を滑車82で折り返し、スライダ6bを後方へ引っ張っても良い。取付部3aに代えて、中途案内部を設け、トーチケーブル3を第1軸線Aに略平行な方向に沿って可動に案内しても良い。
(もっと読む)
自動工具交換装置
【課題】 第1・第2ユニットの連結・分離時に、第2ユニットに対する第1ユニットの移動経路が拘束されず、第1・第2ユニット相互の連結直前における第1ユニットの第2ユニットへの接近移動速度を減速しなくてもよい自動工具交換装置を提供すること。
【解決手段】 第1ユニット1の外周面には連結面側に突出することなくガイドピン22及びその駆動部3を二個設けてあると共に、第2ユニット5の外周面には連結面側に突出することなくガイド孔61を有するブロック60を二個設けてあり、第1・第2ユニット1,5の連結面相互が接した状態において、駆動部3により連結面側に移動せしめられたガイドピン22がガイド孔61に対して挿入されるようにしてあり、一方の組のガイドピン22及びこれに挿脱されるガイド孔61の軸線と、他方の組のガイドピン61及びこれに挿脱されるガイド孔61の軸線との方向をずらしてある。
【選択図面】 図1
 (もっと読む)
(もっと読む)
産業用ロボットの線条体処理構造
【課題】 ロボットの手首先端に装着された作業ツールにエア、電気等を供給する作業ツール用線条体の挙動安定化、及び周辺物体、前腕等との干渉防止。
【解決手段】 ロボット1の手首先端部に取付けられた作業ツールHへのエア供給/吸気を行なうための線条体7は、ロボット1の大きく張り出すことなく、第2手首要素12に取付けられた板状ガイド部材Gの自由端G1付近でガイド面G3に柔らかく接触し、そこから板状ガイド部材Gの長手方向に沿うようにガイドされた後、作業ツールHに接続される。板状ガイド部材Gの厚さを自由端G1に向けて漸減させても良い。ロボット最終軸による第3軸線C2周りの回転を伝動機構を介して第4軸線C3周りの回転に変換し、作業ツールHを回転させる。作業ツールHが回転しても、線条体7の挙動が不安定になることがない。作業ツールHを第3軸線C2周りで回転させることもできる。
(もっと読む)
電圧ケーブルおよびロボットアーム、塗装ロボット、塗装システム
【課題】電圧ケーブルを備えたロボットアームにおいて、柔軟性向上および断線防止の少なくとも一方を実現できる電圧ケーブルを提供する。
【解決手段】ロボットアームは、複数のアーム部材16,18と、先端アーム18の内部に設けられ、受電部26を備えるスプレーガン28と、受電部26に高電圧を供給する電圧発生装置24と、電圧発生装置24で発生した電圧を受電部26に供給する電圧ケーブル30と、を有する。電圧ケーブル30は、絶縁性材料からなる管体と、管体内部に充填される導電性液体を有する。
(もっと読む)
ロボットの待機位置復帰プログラム作成装置
【課題】 ロボットがエラー等で非常停止した際に、ロボットを待機位置へ安全に復帰させるためのプログラムの作成。
【解決手段】 ロボット制御装置3と復帰プログラム作成装置10を通信ネットワーク回線4を介して接続しておく。ロボット1がエラー等により動作途中で停止した場合、ロボット1の停止位置を含む情報を復帰プログラム作成装置10に通知する。復帰プログラム作成装置10は、自身が持つレイアウト情報、通知された情報、ロボットプログラムの教示点とその属性情報から、ロボット1が停止位置から待機位置まで周辺物体との干渉なしで復帰できるようにプログラムを作成する。同作成されたプログラムをオフラインシミュレーション機能を用いて実行し、干渉の無いことを確認したらロボット制御装置3に転送する。同プログラムの実行により、ロボット1は安全に待機位置に復帰する。
(もっと読む)
産業用ロボット
【課題】ロボットの第1アームとワークや治具の干渉が少ない産業用ロボットを提供する。
【解決手段】 ロボットの第1アーム9を、旋回部4に対して回動する方向に、かつ第1アーム9と第2アーム12の内角と反対方向に湾曲させることにより、ロボットが治具16上に保持した箱形状のワーク17の内側で作業を行う場合、湾曲したアームの凹空間13において、干渉点18との干渉を避けることができ、ワーク底面19まで作業することができるので、従来のロボットのワーク内作業領域に比べ、広いワーク内作業領域20を確保することができる。
(もっと読む)
1つまたは複数のマニプレータを制御する制御システムおよび方法
【課題】1つまたは複数のマニプレータを制御する制御システムおよび方法
【解決手段】コンピュータ(4、6)と、ドライブユニット(8)とを備え、マニプレータ(2)を制御するマニプレータを制御する制御システムである。制御システムは、様々な機能を処理するように構成されている複数の独立したモジュール(12、14)を備え、モジュールの各々は、独自の電源を有し、他のモジュールの少なくとも1つと通信するように構成され、コンピュータ(4、6)およびドライブユニット(8)が、モジュールに配置されている。  (もっと読む)
(もっと読む)
制御装置
【課題】溶接時に発生するスパッタにより誤作動することがなく、また制御の簡素化を図り得る制御装置を提供する。
【解決手段】溶接ロボット1の溶接トーチ3によりワークの姿勢変更装置5等の他の動作機器を制御し得る制御装置であって、ケーシング31の上部に形成された複数の穴部32内に溶接トーチが挿入されたことを検出し得る検出部材を設け、一端側が空気源に接続され電磁開閉弁を介して他端側に姿勢変更装置4や物品取付装置5などの動作機器に作動用空気を供給する空気供給管を複数本設け、上記各検出部材からの検出信号を入力して所定の電磁開閉弁に制御信号を出力する制御回路部を設ける。上記各検出部材を、溶接トーチの2箇所を検出し得る複数組の光センサにより構成するとともに、上記制御回路部を、各光センサからの検出信号が同時に得られた場合にだけ、所定の制御信号を出力するように構成する。
(もっと読む)
ワーク取出し装置
【課題】 容器壁の近傍のワークも取出し可能なワークの取出し装置。
【解決手段】 ハンド3は連結部材31を用いてロボットアーム先端10のマウント41に取り付けられる。把持手段35は回転支持部(枢軸)33、34に軸支され、伸縮手段32の伸縮動作により、第1、第2の姿勢(a)、(b)の切替が可能である。ハンド3の把持手段35の把持中心Cは、ハンド3の基部の中心軸線Dからオフセットしている。これにより、把持に際して、ワークの中心軸とハンドの基部の中心軸を一致させる必要がなくなり、ワークが容器内壁に近接していても、ハンド基部の中心を容器の内側にオフセットした姿勢をとることができる。撮像手段4を進退スライド可能にして、撮像時、把持時で進退位置を使い分ければ干渉防止上更に有利である。
(もっと読む)
ロボットシステムを含む自動建設
一対のレール(1940)に摺動可能に装着された少なくとも2つの側部部材(1930)の間に延在し、それによって支持されるオーバーヘッド梁(1920)を含む可動ガントリーロボット(1910)を有するロボットシステム(1900)が、開示される。ノズルアセンブリ(1960)は、押し出すためにオーバーヘッド梁に可動式に結合される。 (もっと読む)
ロボットアーム型自動洗車装置
自動車車両をロボットアームの先端に装着した車両洗浄回転ブラシで自動的に洗浄する方式のロボットアーム型自動洗車装置は、車両左側洗浄ロボットアーム110へ装備する車両左側洗浄回転ブラシ111で主に車両左側を、及び車両右側洗浄ロボットアーム120へ装備する車両右側洗浄回転ブラシ121で主に車両右側を、車両実測サイズ測定装置である車両前面撮影用カメラ150・車両左側面撮影用カメラ153・車両右側面撮影用カメラ159・車両後面撮影用カメラ155・車両上面撮影用カメラ157でそれぞれ撮影して作成する車両画像データを車両自動
洗車装置主制御装置102で分析することで測定した車両実測サイズデータを入力データとして、車両自動洗車装置主制御装置102でそれぞれのロボットアームの先端に装備した車両洗浄回転ブラシを自動的に制御しながら車両洗浄処理を行うロボットアーム型自動洗車装置である。
(もっと読む)
ロボットのパフォーマンスを最適化するための方法
この発明は、ロボット・マニピュレータ及び製造自動化の分野の技術に係る。本発明は、ロボットのパフォーマンスを最適化するための方法に係り、より正確には、ロボットに対するタスクのロケイション、即ち位置および/または向き、を最適化するための方法に係る。既知の方法についての問題点は、例えば、長過ぎるシミュレイション時間や、ユーザへの高度な知識の要求などである。本発明による方法は、下記のステップを採用することにより、これらの問題を解決する:少なくとも二つのテストからなる少なくとも一つの実験を計画する、ここで、各テストは、その実験の中の少なくとも一つの他のテストと、ロボットに対するタスクのロケイションに関して異なっている;タスクのロケイションについて許容可能な境界を計算/決定する;その実験の中の少なくとも一つのテストについての最適化の効果を計算/決定する;その実験データをアルゴリズムに適合させる;タスクの最適なロケイション、即ち位置及び向き、を計算/決定する。
 (もっと読む)
(もっと読む)
複数のロボットアームの追従及び鏡映ジョグ
本発明の方法を実行するシステムは、複数の第1軸の周りで関節運動可能なロボットアームを有してエンドエフェクタを支持するリーダを備える。フォロワは、複数の第2軸のそれぞれの周りで関節運動可能なロボットアームを有する。複数のサーボモータは、リーダアームを第1軸群の周りで関節運動させるとともに、フォロワアームを第2軸群の周りで関節運動させる。ユーザインタフェースは、リーダのアームをジョグ運動させること、及びエンドエフェクタを所定位置に到達させるべく自動実行されるアームの運動をプログラムすることを、ユーザが遂行できるようにする。複数のサーボモータ及びユーザインタフェースに作用可能に接続されたコントローラは、それらサーボモータの動作を制御し、プログラムされた運動に従ってリーダのアームを動かし、リーダの運動に追従又は鏡映するようにフォロワのアームを動かす。  (もっと読む)
(もっと読む)
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
ビジュアルサーボによる位置姿勢制御方法
【課題】 ビジュアルサーボによる位置姿勢制御においてカメラの縦揺れ角および偏揺れ角(姿勢角)の検出精度向上を図る。
【解決手段】 ロボット本体11は、制御装置12により位置の移動と姿勢の駆動制御がなされる。CCDカメラ15は、ロボット本体11の上アーム20に固定され、ワークWを撮影する。あらかじめ参照画像として基準位置からワークWを撮影したデータを記憶させる。制御装置12は、カメラ15で撮影した画像と参照画像のデータとに基づいてビジュアルサーボにより位置姿勢の制御を行なう。収束した段階では、カメラ15を姿勢角を所定以上傾けて画像データを取得する。このとき各画像での姿勢角と参照画像のデータとの誤差値を演算し、誤差値が最も小さくなるときの姿勢角を推定し、補正量として求める。この補正量だけ位置姿勢を制御することで、精度の高い制御を行なうことができる。
(もっと読む)
601 - 620 / 620
[ Back to top ]