
Fターム[3C007BS12]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937) | 6自由度のもの (227)
Fターム[3C007BS12]に分類される特許
1 - 20 / 227
6軸ロボットの軸間オフセット検出方法
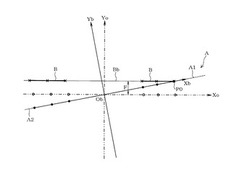
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ロボット

【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
ケーブル支持装置
【課題】ケーブルのたるみを大きくすることなく且つ保持部のストロークを長大化することなく、ロボット手首の自由度に十分に追従させることができるケーブル支持装置を提供する。
【解決手段】ケーブル11を保持する保持部52と、第2アーム24の長手方向に沿って移動自在な直動スライダ70を有する直動機構54と、第2アーム24の周方向に沿って回転自在な回動スライダ92、93を有する回動機構56とを備える。直動機構54及び回動機構56により、保持部52が第2アーム24の長手方向及び周方向に変位自在となっている。
(もっと読む)
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
干渉チェック方法及びロボット制御装置
【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
制御装置およびロボットアームの制御方法
【課題】本発明は、多関節型ロボットアームの滑らかな動作を実現することができる制御装置を提案する。
【解決手段】
本発明の制御装置2は、第一駆動モータ、第二駆動モータ、および第三駆動モータにかかる負荷イナーシャ、重力トルク、モータトルク、ならびにモータイナーシャに加えて、ばね装置のトルク、ならびに第一駆動モータ、第二駆動モータ、および第三駆動モータそれぞれの動力を伝達するための駆動系部材列のイナーシャである駆動系イナーシャのうちの少なくともいずれか一つを用いて、第一駆動モータ、前記第二駆動モータ、および第三駆動モータの角加速度を算出する加速度算出手段を備える。
(もっと読む)
ロボット教示データの算出方法およびロボットのコントローラ
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
チャック装置
【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
ロボットの手首構造及びロボット
【課題】周辺機器との干渉を低減することが可能なロボットの手首構造及びロボットを提供する。
【解決手段】ロボット10の手首部20は、第1の軸回りに回転する第1の手首アーム40aと、第1の手首アーム40aの先端部に設けられ、第1の軸に実質的に交差する第2の軸回りに揺動する第2の手首アーム40bと、第2の手首アーム40bの先端部に設けられ、第2の軸とねじれの位置にある第3の軸回りに回転する手首フランジ42と、手首フランジ42に固定される中間部材44と、中間部材44に固定されるエンドエフェクタ22に接続される線条体25bとを備え、線条体25bが、第2の手首アーム40b、手首フランジ42、及び中間部材44の内部を通り、中間部材44から外部に引き出されてエンドエフェクタ22まで配線される。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
ティーチングデータ作成方法およびティーチングデータ作成装置
【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
玉掛けロボット及びこれを用いた玉掛けシステム
【課題】不正確な玉掛けを解消して、正確に玉掛けを実施することができる玉掛けロボット及びこれを用いた玉掛けシステムを提供すること。
【解決手段】玉掛けシステム1は、多関節ロボット20bと、多関節ロボット20bのアームに取り付けられるロボットハンド30であって、鋼材玉掛用の吊ワイヤを把持又は解放するロボットハンド30と、吊ワイヤに取り付けられた反射テープ14cを照明する照明機器18aと、所定の検出感度に設定され反射テープを検出しカメラ映像として出力するCCDカメラ18bと、そのカメラ映像に基づいて反射テープの位置を求める画像処理雄値18と、反射テープの位置に基づいて吊ワイヤを把持させる把持命令をロボットハンド30に送信して当該ロボットハンド30を制御する玉掛けロボット制御装置16とを備える。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
ロボットシステムおよびロボット組立システム
【課題】
三次元計測装置を用いて複数種類の部品を把持するのに適したロボットシステムを提供する。
【解決手段】
所定の計測領域の三次元情報を計測する三次元計測装置と、前記三次元情報から対象物の位置姿勢を求める位置姿勢認識装置と、鉛直な第1軸を旋回軸として固定ベースに水平旋回可能に取り付けられた旋回ヘッドによりアームを水平旋回させ、アームの先端に取り付けられた前記対象物を把持するツールの先端の動作領域が前記第1軸を回転軸とする回転体領域である垂直多関節ロボットと、から構成されるロボットシステムであって、動作領域内に第1軸を中心とした一定の角度ごとに複数の作業領域を設定し、ツールが一の作業領域に存在する場合に、前記計測領域が他の作業領域を包含する位置にて前記三次元計測装置の計測部を前記旋回ヘッドに固定する。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
1 - 20 / 227
[ Back to top ]