
Fターム[3C007BS13]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937) | 7自由度のもの (72)
Fターム[3C007BS13]に分類される特許
1 - 20 / 72
ワークピッキングシステム
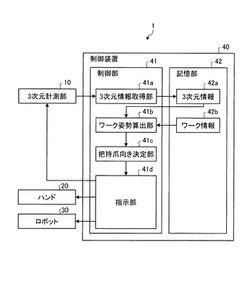
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ

【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
ロボット
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボット100は、アーム103L,103Rと、アーム103L,103Rに設けられ、アーム103L,103Rを駆動させるアクチュエータAc2〜Ac8と、アーム103L,103Rの内最も基端側に位置するアクチュエータAc2,Ac9の基部に設けられたセンサ固定治具121と、センサ固定治具121に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122とを有する。
(もっと読む)
7軸多関節ロボットの制御方法、制御プログラム及びロボット制御装置
【課題】7つの関節のうち基端側にある3つの関節の各回転軸のうち少なくとも1軸が他の軸と一点で交わらない機構を持った7軸多関節ロボットを人間の腕のように滑らかに動作させる制御を適切に実現する。
【解決手段】基端から先端に向かって順に設けられた7つの関節を具備し、当該7つの関節が次の関節を旋回させる回転軸と次の関節を回動させる回転軸とを交互に有しており、かつ当該基端側にある3つの関節の各回転軸が一点で交わらないように構成された7軸多関節ロボットの制御方法であって、前記3つの関節のうち中間関節の回転軸を肩とみなした場合の擬似的な肘角度が一定となるような前記中間関節の関節角を拘束条件に用いて逆変換を実行する(ステップS505)。
(もっと読む)
ロボットシステム及びロボットの状態判定方法
【課題】ロボットの機能性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122と、センサ122の出力値Vに基づいて、ロボット100が常態であるか非常態であるかを判定する判定部164を備えたロボットコントローラ150とを有している。ロボットコントローラ150は、アーム103L,103Rが常態時に所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記憶する規範データ記録部163を有し、判定部164は、稼働時において、アーム103L,103Rが所定の動作を行う際のセンサ122の出力値Vの出力データと、規範データ記録部163に記録された規範データとを比較することにより、ロボット100が常態であるか非常態であるかを判定する。
(もっと読む)
7軸多関節ロボットの制御装置および教示方法
【課題】 教示作業時においてロボット全体の動作軌跡を容易に把握して適切な教示を行うことができる7軸多関節ロボットの制御装置および教示方法を提供する。
【解決手段】 7軸多関節ロボット1の教示を行う教示モードにおいて、所定の平面Pzを設定する設定器21と、肘部Eの動作軌跡が設定器21により設定された平面Pz内に制限されるように7軸多関節ロボット1を動作制御する制御器23と、手先11の位置が教示された場合に、肘部Eの動作の制限を拘束条件として、手先11の位置変化に基づく各回転軸A1〜A7の回転角度を演算する逆変換演算を行う演算器22とを備えている。
(もっと読む)
ロボット制御装置
【課題】ロボットのハードウェア制限条件を考慮しながら、安定したビジュアルフィードバック制御を提供する。
【解決手段】カメラで撮影された画像から対象物の特徴を表す画像特徴量を算出する画像特徴量算出部105と、画像特徴量の変化と前記関節角の変化の割合である画像ヤコビアンを算出する画像ヤコビアン算出部107と、設定された目標値と前記画像特徴量とを用いて、ロボットの制御周期毎の画像上の目標軌道を生成する目標軌道生成部108とを備える。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータにおいて、遠隔操作装置とスレーブアームとの構造が異なる構造であっても、逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】遠隔操作装置100からの操作信号を受けて、マスタ制御部201は、操作部101の姿勢変化に係る等価回転ベクトルVr(t)と直前の操作部101のマスタロール軸Xm(t)とを算出する(ステップS1)。Vr(t)とXm(t)のなす角φが規定値以下の場合には、冗長関節1(Roll2)と、関節1と冗長関係にある関節4(Roll1)のうち、Roll2を駆動関節とし、Roll1を固定関節として(ステップS3)、逆運動学計算を行う。角度φが規定値を以下でない場合には、Roll1を駆動関節とし、Roll2を固定関節として(ステップS4)、逆運動学計算を行う。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
6軸ロボットの4軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの5軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて4軸の原点位置を適切に較正できる6軸ロボットの4軸原点位置較正方法を提供する。
【解決手段】垂直多関節型の6軸ロボットについて、6軸の軸心の延長線上に計測点を定めるための計測補助具を取り付け、5軸を4軸の軸心の延長線から所定の角度θ5_1だけ回転させて計測点を第1計測位置に移動させ(S1)、第1計測位置をレーザー変位計により計測すると(S2)、5軸を、4軸の軸心の延長線から上記の回転方向とは逆方向に角度θだけ回転させる(S3)。次に、少なくとも6軸を固定して、計測点を、第1計測位置と同じ位置となる第2計測位置に移動させ(S4)、第2計測位置をレーザー変位計により計測すると(S5)4軸の誤差角度Δθ4を(4)式で求め(S6)、誤差角度Δθ4を用いて4軸の原点位置を較正する(S7)。
(もっと読む)
冗長マニピュレータの冗長自由度の決定方法
【課題】冗長マニピュレータ1の手先8をCP制御にて変化させるに際し、アームアングルψの連続性を担保する技術を提供する。
【解決手段】制御装置100は、各ステップにおける手先8の位置及び姿勢状態を取得する状態取得手段20と、各ステップにおける手先8の位置及び姿勢状態に基づいて、各ステップにおけるアームアングルψの実現可能な領域を算出する領域算出手段21と、隣り合うステップ間で領域同士が少なくとも一部重複するように、ステップs0からステップsnに至る間の領域の組み合わせを作成する組み合わせ作成手段22と、領域の組み合わせに基づいて、CP制御の各ステップにおけるアームアングルψを決定する冗長自由度決定手段23と、を備える。
(もっと読む)
6軸ロボットの6軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの7軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて6軸の原点位置を適切に較正できる6軸ロボットの6軸原点位置較正方法を提供する。
【解決手段】設置面に、上方に位置する測定対象物との距離を測定するレーザー計測器を設置し、6軸の軸心に測定板を取り付ける。そして、6軸ロボットの2軸を1軸の軸心に対して90度回転させ、4軸の軸心が1軸の軸心と平行となるように3軸を前記設置面の方向に回転させ、6軸の軸心が前記設置面と平行となるように5軸を回転させた姿勢を取らせた状態で、測定板の一端側が第1計測点となるように位置させると(S1)、レーザー計測器により第1計測点までの第1距離L1を測定する(S2)。次に1軸を回転させて、測定板の他端側が第2計測点となるように位置させ(S3)、レーザー計測器により第2計測点までの第2距離L2を測定すると(S4)、6軸の誤差角度Δθ6を(1)式で求め(S5)、誤差角度Δθ6を用いて6軸の原点位置を較正する(S6)。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
ロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法
【課題】ロボットに動作を教示する際に、ロボットアームの駆動部の可動残量を容易に確認することができるロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法を提供する。
【解決手段】可動範囲が予め設定された駆動部11〜17を備えるロボットアーム18、18aに装着され、作業対象物19に対して作業を行う作業ツール20、20aと、作業ツール20、20aに近接して配置され、可動範囲に対する駆動部11〜17の可動残量を表示する状態呈示装置21と、作業ツール20、20aに対する作業対象物19の位置を検知する位置検出手段25と、駆動部11〜17の可動範囲内で、駆動部11〜17を駆動してロボットアーム18、18aの動作を制御するアーム制御部27とを有し、アーム制御部27は、作業ツール20、20aが作業対象物19に作業を行える位置及び姿勢となったロボットアーム18、18aの姿勢を記憶する。
(もっと読む)
マニピュレータのキャリブレーション方法及びロボット制御システム
【課題】
マニピュレータのキャリブレーションをどこでも簡単に行うことができ、治具の準備などの作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことが可能であり、マニピュレータに求められる本来の作業を行うための不必要な待ち時間や工数を削減する。
【解決手段】
複数の観測位置姿勢毎にレーザ変位センサLSにより治具Gの直線部上の点をそれぞれ検出する。検出した値から直線部上の検出点のロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法によりマニピュレータのキャリブレーションを行う。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
溶接装置
【課題】溶接ガンの姿勢変更の際に、ロボットの動作軌道や空間移動時間が短く、さらに、段取り作業時間を短縮可能な溶接装置の提供を目的とする。
【解決手段】多関節型のロボット1と、ロボット1の先端の手首関節部1aを介して取着されるガン取付アーム2と、を備え、ガン取付アーム2にスポット溶接用の溶接ガン3を水平軸心La廻りに揺動自在に枢着した。
(もっと読む)
生産システム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備え、省スペース化された生産システムを提供する。
【解決手段】ワーク13と、前記ワーク13が載置されたワークストッカ12と、前記ワークストッカ12の搬出口に配置された双腕ロボット11と、前記双腕ロボット11の胴体前方に対向するように配置された第2のロボット21とから構成されたものである。
(もっと読む)
ロボットアームの干渉回避方法
【課題】冗長性を有する多関節のロボットアームを各関節に干渉の起こらないような関節位置をとりうる全関節位置から算出し教示することなく、ロボットアームの干渉回避を行うことができるロボットアームの干渉回避方法を提供する。
【解決手段】ロボットアームを現在の姿勢から別の姿勢に移行させる際に、制御装置により予め冗長関節12,14,16の必要回転角度を演算し、この必要回転角度による各関節、各アーム及びハンドの移動予測点が進入禁止領域20に入らない場合には、前記必要回転角度を各関節の指示値として、別の姿勢にロボットアームを移行させ、移動予測点が進入禁止領域20に入る場合には、あらかじめ設定された回避動作を実行する。
(もっと読む)
1 - 20 / 72
[ Back to top ]