
Fターム[3C007CT07]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの構造 (29)
Fターム[3C007CT07]に分類される特許
1 - 20 / 29
ロボットアーム及びロボットアームの制御方法
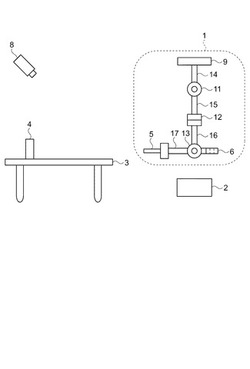
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
ロボット

【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
ロボットアーム装置
【課題】昇降部の上昇動作に伴って基台本体部内で舞い上がる粉塵が昇降部と基台本体部との隙間から上方へ放出されることを、ファンや排気口による排気機能や、シール部材によるシール機能に依存することなく、しかも昇降部の昇降速度を制限することなく、防止・抑制可能なロボットアーム装置を提供する。
【解決手段】アームを支持する基台を、基台本体部3と、基台本体部3の天井壁32に形成した開口部3aを通じて基台本体部3に対して昇降可能な昇降部4と、基台本体部3の内部空間3Sの上部及び下部に連通して内部空間3Sの空気を循環させる流路6とによって構成し、流路6のうち基台本体部3の内部空間3Sの上部に連通する上側流路口61の開口断面積を、天井壁32に形成した開口部3aと昇降部4との隙間の断面積よりも大きく設定した。
(もっと読む)
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
垂直多関節型ロボット及びロボットセル
【課題】天井に設置する場合であれ、設置対象となる天井の高さを低く抑えることのでき
る垂直多関節型ロボット、及び該垂直多関節型ロボットを備えるロボットセルを提供する
。
【解決手段】天吊りされる垂直多関節型ロボット10は、複数のアームが重力方向に非平
行な回転軸C2,C3,C5を有する関節を介して順に連結されて構成されるアーム部と
、前記アーム部を支持するベース11とを備えている。垂直多関節型ロボット10は、前
記ベース11の少なくとも一部が天井面を貫通した状態で天井部24に設置される。
(もっと読む)
ロボット用胴部構造体
【課題】軽量かつ高剛性なロボット用胴部構造体を提供する。
【解決手段】少なくとも2つの腕部接続面と少なくとも1つの腰部接続面とを有するロボット用胴部構造体であって、前記胴部構造体の前記腕部接続面と前記腰部接続面とを含む正面断面図、及び/または、側面断面図において、前記腕部接続面の下端と、前記腰部接続面の端部のうち前記下端に近接する端部とが、略直線で結ばれていることを特徴とするロボット用胴部構造体。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
移送ロボット
【課題】本発明は、2組のリンク機構から構成された、昇降機構において、リンクへの負荷を軽減する機構を提供する。
【解決手段】搬送物を載置するハンド部と、前記ハンド部と連結され少なくとも2つ以上の回転関節を備え前記ハンド部を一方向に移動するように伸縮し旋回軸方向に対向するように配置された2組の水平アームからなる水平アーム機構30と、前記水平アーム機構30の支持ベース8に連結され水平アーム機構30を昇降する少なくとも2組のリンク機構から構成される昇降機構20と、から構成され、前記支持ベース8と前記昇降機構20の第3関節部8bとの間には水平アーム機構30をX方向に移動自在に支持する直動機構が配置されたものである。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
吊下げ型協調作業ロボット
【課題】人と共存、協調する作業場所に作業ロボットを投入する場合に、作業場所の近傍の床上の障害物があっても作業ロボットを配置することができ、その作業ロボットを配置した際に作業者の安全を確保することができ、しかも高精度の位置決めも作業命令の大規模な改変も必要としない作業ロボットを提供することにある。
【解決手段】撮像手段と、可動部を逆入力可能に駆動する関節を持つ少なくとも1本の作業腕と、前記作業腕を支持する胴部と、作業場所の天井又は壁に基部を着脱可能に固定されて吊り下げられるとともに先端部で前記胴部と前記撮像手段とを支持する支持部材と、前記撮像手段が撮像した画像に基づき前記作業場所での作業対象物と当該作業ロボットとの相対位置を認識し、その相対位置に基づき前記作業対象物に対する作業を前記作業腕に行わせる作動制御手段と、前記作業が人と共存、協調して行う作業であることを認識すると、前記作業腕の関節を作動させるモータの出力を低下させる出力制御手段と、を具えてなる吊下げ型作業ロボットである。
(もっと読む)
真空搬送装置及び表示装置の製造方法
【課題】
ストロークの大きな真空搬送装置であっても、適時にその駆動系を覆う容器の内部を真空排気出来る基板搬送装置を提供することを本発明の課題とする。
【解決手段】
本発明の係わる真空搬送装置は、内部を排気し得る第一の容器、前記第一の容器内に位置する内部を排気し得る第二の容器、前記第二の容器を一の方向に並進移動をさせる運動手段、排気手段と連通/遮断をするバルブ及び第一の容器に設けられた中空部分を有する第一の接合部、前記第二の容器に設けられた前記第一の接続部に対向する中空柱状体の突出部並びに前記中空柱状体の突出部の内側を移動可能で、前記第一の接合部に前記運動手段により接合可能な中空柱状体の部分を有する第二の接続部を有する構成とする。
(もっと読む)
多関節ロボット及び生産設備の製造方法
【課題】ロボットを分解することなく移送でき、容易に設置できる及び生産設備の製造方法を提供する。
【解決手段】台座と、台座に立設され少なくとも上側ブロックと下側ブロックとを有するコラムと、コラムに設けられコラムに沿って移動する移動機構と、移動機構に連結された支持部材と、支持部材に支持され複数の関節を有するアームと、を有する多関節ロボットであって、上側ブロックが横倒し状態にまで揺動可能となるように上側ブロックと下側ブロックとを連結する可動部材と、上側ブロックが横倒し状態となった状態で上側ブロックを固定する固定部材と、を有して構成する。
(もっと読む)
多関節ロボットを備えたロボットシステム
【課題】ロボットの姿勢自由度を増しつつ、安価なロボットシステムを提供する。
【解決手段】ロボットシステム(1)は、ロボット基部(11)およびロボット基部に旋回可能に取付けられたアーム部分(12)を含む多関節ロボット(10)と、設置面に設置される設置部(21)および設置部に回転可能に取付けられた回転テーブル(22)を含む回転ユニット(20)と、アーム部分が旋回する旋回軸線と回転テーブルが回転する回転軸線とが非平行になるように、多関節ロボットのロボット基部と回転ユニットの回転テーブルとを連結する連結ユニット(30)と、多関節ロボットおよび回転ユニットを制御する制御ユニット(40)と、を具備する。
(もっと読む)
結び目をつくるロボット装置およびその制御方法
【目的】2つの作業用アームの二次元平面内における動きのみで結び目をつくる。
【構成】回転テーブル40上に広げた包装用シートS上に被包装物Oj を置き,被包装物をシートSでくるんでできる2つの緒部を2つの作業用アームで把持して起立させ,かつ若干内側に寄せて近づけ,その状態で回転テーブルを回転させて交差部をつくり,一方の緒部先端を交差部下方の通し空間に挿入し,両緒部先端を互いに離れる方向に引っ張ることにより,結び目が形成される。
(もっと読む)
ワーク搬送装置
【課題】 装置全体の小型化を図り、製造設備のダウンサイジングに貢献することができるワーク搬送装置を提供する。
【解決手段】 ワーク搬送装置A1は、ワークを水平方向に往復移動させるハンド機構8と、ハンド機構8を鉛直方向に昇降させるシザースリフト機構4と、シザースリフト機構4を搭載する台座2と、台座2を鉛直軸周りに回転させる回転機構とを備えている。第1のシザースリンク41の下端部から中間部にかけては、下部配管が付設されているとともに、第2のシザースリンク42の上端部から中間部にかけては、上部配管5が付設されており、かつ、第1および第2のシザースリンクの中間部同士の間には、下部配管7および上部配管5に連通するように中間配管6が接続されている。
(もっと読む)
ロボットにより工作機械へワークの着脱を行うロボットシステム
【課題】ロボットにより工作機械へワークの着脱を行うロボットシステムの利便性や処理効率を高める。
【解決手段】工作機械10へワーク1の着脱を行うロボット20は、工作機械10の、ワーク1を出し入れするための扉12が形成された左側面14に対して垂直に延びる走行軸部材40、およびそれに沿ってスライド移動するスライダ部材50を有する走行軸機構30と、スライダ部材50に取り付けられた可動アーム機構60を有している。可動アーム機構60は、一端がスライダ部材50に第1の軸71回りに回転可能に取り付けられた第1のアーム70、第1の軸71に平行な第2の軸72回りに回転可能に第1のアーム70の他端に一端が取り付けられた第2のアーム80、および第2のアーム80の他端に取り付けられたワークの保持機構を有している。
(もっと読む)
遠隔作業装置
【課題】広範囲の作業も容易に行える遊泳移動型の遠隔作業装置が持つ作業性と、反力を伴う作業や正確な位置決めが必要となる作業も容易に行える設置型の遠隔作業装置が持つ作業性の下で、設備の予防保全作業を行える遠隔作業装置を提供すること。
【解決手段】本発明では、遠隔制御を受けて、発電プラントその他の設備の予防保全作業を行う遠隔作業装置において、作業具5を保持する先端作業部202とこの先端作業部202の位置決め操作を行う多関節のアーム部203とを有するロボットアーム2と、設備の構造間に架け渡される架橋体を成してロボットアーム2を支持し、この架け渡し方向を軸とする旋回方向、この架け渡し方向に沿う方向、この架け渡し方向の軸から遠ざかる方向およびこの軸に近づく方向の各方向にロボットアーム2を変位させるロボットアーム設置体3と、ロボットアーム2とロボットアーム設置体3とを着脱可能に連結するロボットアーム着脱機構4とを備えるようにした。
(もっと読む)
ウェーハ搬送装置
【課題】ミニエンバイロメント装置のクリーンボックス内に、クリーンエアの好適なダウンフローを形成できる、ウェーハ搬送装置を提供することを課題とする。
【解決手段】半導体ウェーハ4bを加工するミニエンバイロメント装置1に備わるクリーンボックス2の背面の側の側壁部23bにロボット本体20の走行装置21を備え、ロボット本体20を走行させることで、クリーンボックス2の床部23aに、ロボット本体20が走行する軌道を設置することなく、ロボット本体20を走行できる構成とする。
(もっと読む)
搬送ロボット
【課題】本発明は、簡単な構造の上下軸機構を備えた搬送ロボットを提供する。
【解決手段】ワークを一方向に搬送するアーム部5と、前記アーム部5を昇降させるリンク機構2からなる昇降機構を備えた搬送ロボットにおいて、前記リンク機構2が、少なくとも2つの前記リンク機構2、3を備え、互いに直交する回転軸R1軸、R2軸に沿ってリンク6、7が回転動作をすることで前記アーム部5を昇降させるとするものである。
(もっと読む)
1 - 20 / 29
[ Back to top ]