
Fターム[3C007ES06]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 5つ以上 (98)
Fターム[3C007ES06]に分類される特許
21 - 40 / 98
部材把持装置、及び部材搬送装置
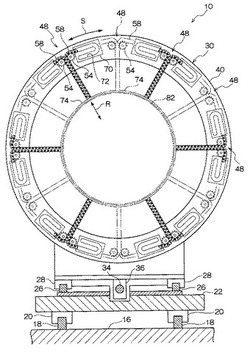
【課題】コンパクトな部材把持装置を提供する。
【解決手段】環状ベース40の周方向に複数の噛合チェーン式伸縮装置42を配置する。噛合チェーン式伸縮装置48は、一対の噛合チェーン58を備え、周方向から径方向への偏向駆動直後に相互に噛合って一体に自立状態で環状板44の中心軸に向かって移動すると共に、環状板44の径方向から周方向へ偏向駆動時に相互に噛み外れて分岐する。噛合チェーン58の端部には環状部材82に接触するパッド74を設ける。各噛合チェーン式伸縮装置42は、動力伝達チェーン78の回転により同期駆動され、全ての噛合チェーン58が環状ベース40の同一径方向に移動する。動力伝達系にリンクを用いていないので高い把持精度が得られる。分岐した噛合チェーン58は周方向に配置されたチェーン収納部70に収納されるので、径が大きくならずコンパクトにできる。
(もっと読む)
粒子フィルタを使用した多指ロボットハンドのための接触状態推定

【課題】粒子フィルタを使用して、ロボットハンドが触れようとする対象物の位置、向き及び形状を特定する。
【解決手段】 ロボットハンド20が触れようとする対象物の位置、向き、及び形状を同定するための方法は、粒子フィルタを使用する。その方法は、適切な動きモデルと、測定値モデルを定義する。動きモデルは、ロボットハンド20が対象物に対して移動するときの、その動きを特徴としている。測定値モデルは、接触位置、速度、及び触覚センサ情報が与えられるハンド/対象物状態の観測の可能性を推定する。測定値モデルは、幾何学モデルに基づいて、又は集成トレーニングデータに基づいて、解析的に近似される。いずれの場合も、測定値モデル分布は、ガウス分布として符号化されるか、又は放射基底関数を使用して符号化される。
(もっと読む)
ロボットハンド装置
【課題】 構造が簡素であり単一のモータで2軸回りに指機構を操作させることができるロボットハンド装置を提供する。
【解決手段】 ロボットハンド装置10は、基部12に固定されたモータ14、モータ14の駆動軸14aに基端部が固定され基部12から延設される基部リンク部材26と先端リンク28からなる指機構16、モータ14の駆動軸14aに設けられた第1軸P1を有する第1プーリ18、先端リンク部材28に設けられた第2軸を有する第2プーリ20、基部12に一端が固定され指機構16の先端リンク部材に他端が固定されると共に第1プーリ18及び第2プーリ20に掛け回されるワイヤ22を備えている。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作を実現し且つ小型軽量化を可能とすることにより、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】示指機構6と中指機構7との何れか一方又は両方及び拇指機構5に、指先部に作用する力を検出する力センサ21を設ける。力センサ21を備える指機構を、指先でのつまみ動作を含む器用動作を行う器用指とする。器用指以外の指機構は、器用指の動作に応じて握り動作を含む力動作を行う力指とする。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作と十分な把持力を得ながら小型軽量化を可能として、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】基部4と5つの機構5〜9とを備えるハンド本体2を設け、指機構を駆動する駆動手段3を設ける。駆動手段3は、ハンド本体2内で指機構を作動させる従動流体圧シリンダと、ハンド本体2の外部にあって従動流体圧シリンダに流体圧伝達管45を介して接続された駆動流体圧シリンダ37と、駆動流体圧シリンダ37から従動流体圧シリンダに伝達される作動用流体圧を調節して指機構の屈伸を制御する制御手段36とを備える。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
多指ハンド装置
【課題】拇指機構をコンパクトに構成し且つ十分な把持力を得ることができる多指ハンド装置を提供する。
【解決手段】拇指機構5に、第1の回動軸191と第1の回動軸191の軸線に交差する軸線を有する第2の回動軸との2軸で回動する手根中手関節19,20を設ける。第1の回動軸191の回動を駆動する第1の駆動シリンダ29と、第2の回動軸の回動を駆動する第2の駆動シリンダ34とを設ける。第2の回動軸を中空に形成して基部4に配設し、第2の回動軸の内部に第1の駆動シリンダ29を設ける。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
グリッパ装置およびその構築モジュール
【課題】機械的手段によって弾性的に変形可能であると共に、物品および物体をしっかりと掴むのに適した空気式制御グリッパ装置を提供すること。
【解決手段】支持体のジオメトリ軸の周囲に、平行かつ角度的に離間されて位置決めされた複数のグリッパモジュールを保持する支持体と、各モジュールは、筐体の一側面に沿って半径方向スロット18に沿った外弧を有し、アクチュエータピストンが係合するアーチ形の可撓性適把握要素21を備える。すべての適把握要素は、外弧が各スロット内に退避した収縮解除静止状態と、外弧が前記半径方向スロットから突出して、掴む対象の物品、物体、またはケースに係合する圧縮/収縮作業状態との間で可動である。
(もっと読む)
導管反力を介した腱張力の感知
【課題】例えばロボットの手における腱の張力を正確に測定できる小型のセンサーを提供する。
【解決手段】本発明の教示によれば、腱が通る導管にかかる導管反力を使用して腱の張力を判定する技法が開示されている。この目的のためには、導管反力を使用する如何なる適式な腱張力センサーも採用できる。非限定的一実施形態においては、腱張力センサー50は、円筒形ひずみゲージ素子62と、導管54の一端に搭載されている力片56とを備えている。力片56は、内腔を有する円筒形部58と、力プレート60とを備えており、その円筒形部58は、ひずみゲージ素子62の内腔64に挿入される。腱52は、ひずみゲージ素子62及び力片56を貫通している。ひずみゲージ70及び72がひずみゲージ素子62に搭載されており、腱52にかかる張力によりひずみゲージ素子62が力片56に対して押されるときの反力を測定する。
(もっと読む)
腱張力センサー
【課題】ロボットアーム等の連続した一本の腱に掛かる張力を正確に測定する小型の張力センサーを提供する。
【解決手段】ロボットアームに採用される腱に掛かる張力を測定することに特別に応用できる腱張力センサー20である。その張力センサー20は、健が挿通する曲がった溝(38,40)を有する弾性要素30を備えている。弾性要素30は、それに掛かるひずみを測定するひずみゲージ42が搭載された中央部36を有している。腱に掛かる張力により、弾性要素30の中央部36は撓み、又は曲がり、それがひずみゲージ42により測定され、腱の張力として示される。
(もっと読む)
チャック装置
【課題】一の駆動源により複数のヘッドを移動(スライドあるいは搖動)させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能なチャック装置を提供する。
【解決手段】第1のヘッド21および第2のヘッド22は、ベースに対してそれぞれスライド自在に取り付けられている。第1のヘッド21には、第1のプーリ214が取り付けられ、第2のヘッド22には、第2のプーリ224が取り付けられている。ワイヤ61は、一端がワイヤ止め金具71によりベースに固定され、第1のプーリ214および第2のプーリ224を経由して張設されている。モータからの回転駆動力は、ワイヤ61を介して第1のプーリ214および第2のプーリ224へと伝達され、第1のヘッド21および第2のヘッド22がワイヤ61の変位に応じてスライドする。
(もっと読む)
ロボットハンド
【課題】一つのロボットハンドによって、種々の把持対象物の形状や性質に合わせて、異なる向きに安定に把持することができるようにする。
【解決手段】多角形リンク機構18は、少なくとも4個のリンク30a、30b、31a〜31dと、これらのリンクそれぞれに取り付けられて互いに隣接するリンク同士を回動可能に連接するヒンジ32a〜32hと、を備える。リンク同士がヒンジを介して直列に環状に連接されて多角形を形成する。互いに対向するヒンジまたはリンクに直動駆動機構が配置されてそれらのヒンジまたはリンク同士の間隔を拡張収縮させる。直動駆動機構の動作によって互いの相対的向きが変化する少なくとも3個のリンクのそれぞれに指11a〜11dが固定されている。多角形リンク機構の拡張収縮に伴い指の配置位置が可変できる。
(もっと読む)
ハンドおよびその動作方法
【課題】本発明は、把持対象物を破損することなくあらかじめ設定したある一定の把持力で把持でき、把持対象物の形状に倣って包み込むように把持でき、しかも比較的簡単な構成でこれを実現できるハンドを提供する。
【解決手段】基部1と、前記基部1に固定される回転駆動機構2と、前記回転駆動機構2と連結される少なくとも2つのリンク3を備えたハンドにおいて、各リンク3は関節に動力伝達部品4とラチェット機構5を有し、前記回転駆動機構2は各関節に備えられた動力伝達部品4およびラチェット機構5にベルト6を介して連結されていることを特徴とするものである。
(もっと読む)
ナット把持治具
【課題】ロボットの移動動作によってナットの把持を確実に行うことができるナット把持治具を提供すること。
【解決手段】ナット9を載置するための下治具2と、ロボット8のアーム81に接続される上治具3とよりなる。下治具2は、載置台部と、ナット9の外周面の周方向位置を規制するための外周規制部とを有し、外周規制部は、載置台部に対して軸方向に相対移動可能に配設され、規制位置に向けて付勢されている。上治具3は、アームに接続される基部30と、基部30に対して相対移動可能であると共に付勢力に抗して上記縮小位置に向けて移動した場合にナットのねじ込み方向に回転するよう構成された回転部31と、回転部31に固定され、ナット9を収容可能な把持凹部と、把持凹部に収容されたナット9を保持する保持部とを備えた把持ヘッド部35とを有する。
(もっと読む)
ロボットハンド及びこれを備えた人間型ロボット
【課題】 トルクリミッターを通して関節の屈曲角度を調節することで、指機構の精密制御を可能にするロボットハンド及びこれを備えた人間型ロボットを提供する。
【解決手段】 アクチュエータが設けられたベース部と、前記ベース部に設置される少なくとも一つの指機構と、前記指機構に設けられた複数のリンク部材と、前記リンク部材を連結する複数の関節と、前記アクチュエータの動力を受けて、前記複数の関節を連動させる複数の動力伝達部材と、前記複数の関節のうち何れか一つの関節に配置され、前記何れか一つの関節の屈曲を制限し、前記複数の関節のうち他の一つの関節を前記何れか一つの関節に連動させるトルクリミッターとを含んでロボットハンドを構成する。
(もっと読む)
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
(もっと読む)
把持装置及びその制御方法
【課題】物体把持時における指先剥離に対応して、指先と把持物体が滑らないように接触を保つ。
【解決手段】指が物体に接触した状態で、各指の基準座標系で構成される多角形の外接円の中心を疑似中心として計算し、各指の指先接触点から疑似中心へ向かう方向を接触力の向きに決定し、該向きが決定された各接触力にその大きさを与え、各指のハンド座標系の各軸方向の分力を決定する。外乱印加時に、把持物体の位置及び姿勢の変化量に比例した反力を各指の接触点における接触力に変換し、この接触力を基準把持力に重畳させる。
(もっと読む)
21 - 40 / 98
[ Back to top ]