
チャック装置

【課題】一の駆動源により複数のヘッドを移動(スライドあるいは搖動)させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能なチャック装置を提供する。
【解決手段】第1のヘッド21および第2のヘッド22は、ベースに対してそれぞれスライド自在に取り付けられている。第1のヘッド21には、第1のプーリ214が取り付けられ、第2のヘッド22には、第2のプーリ224が取り付けられている。ワイヤ61は、一端がワイヤ止め金具71によりベースに固定され、第1のプーリ214および第2のプーリ224を経由して張設されている。モータからの回転駆動力は、ワイヤ61を介して第1のプーリ214および第2のプーリ224へと伝達され、第1のヘッド21および第2のヘッド22がワイヤ61の変位に応じてスライドする。
【解決手段】第1のヘッド21および第2のヘッド22は、ベースに対してそれぞれスライド自在に取り付けられている。第1のヘッド21には、第1のプーリ214が取り付けられ、第2のヘッド22には、第2のプーリ224が取り付けられている。ワイヤ61は、一端がワイヤ止め金具71によりベースに固定され、第1のプーリ214および第2のプーリ224を経由して張設されている。モータからの回転駆動力は、ワイヤ61を介して第1のプーリ214および第2のプーリ224へと伝達され、第1のヘッド21および第2のヘッド22がワイヤ61の変位に応じてスライドする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、チャック装置に関し、特に、一の駆動源により複数のヘッドを移動させて対象ワークをチャックするチャック装置に関する。
【背景技術】
【0002】
産業用ロボットや搬送装置などに代表される設備には、複数のヘッドをスライド駆動あるいは搖動させることによりワークをチャックしたり位置決めしたりするチャック装置が用いられている。チャック装置は、例えば、その一例が特許文献1〜4で提案されている。
特許文献1〜2では、放射状にスライド駆動自在に設けられた3つの爪(ヘッド)と、それぞれの爪に対してスライド駆動のために接続されたシリンダとを備えたスライド型のチャック装置が提案されている。この装置では、3つの爪のそれぞれに接続されたシリンダの駆動により3つの爪がスライド駆動されるので、大きな駆動力を以ってワークをチャックすることが可能である。
【0003】
また、特許文献3〜4では、上記特許文献1〜2で提案された装置と同様に、放射状にスライド駆動自在に設けられた3つの爪(ヘッド)を有し、これら3つの爪をラック・アンド・ピニオン機構を介して一のシリンダで駆動させるスライド型チャック装置が提案されている。この装置では、一のシリンダにより3つの爪をスライド駆動できるので、装置の小型化・軽量化を図ることができるとともに、3つの爪を互いに同期した状態でスライド駆動させることができる。
【特許文献1】特開平04−159092号公報
【特許文献2】特開平11−254370号公報
【特許文献3】特開平02−279292号公報
【特許文献4】特開平04−032299号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1〜2で提案されているチャック装置では、3つの爪の各々に対してシリンダが接続されており、これらのシリンダの駆動により3つの爪が各々独立した状態でスライド駆動するので、正確な位置決めを行いながらワークをチャックすることが困難である。即ち、この装置では、各シリンダ間での押圧力および駆動速度の相対的な関係により、ワークの位置が決定されてしまう。
【0005】
また、上記特許文献1〜2で提案されているチャック装置について、4つの爪が四方からワークをチャックする形態の装置に適用しようとする場合には、先にワークに当接した爪によりワークの動きが規制されてしまう。このため、この文献で提案されている構成では、遅れてワークに当接した爪によっては、実質的にワークの位置決めを行えないことも考えられる。
【0006】
また、上記特許文献1〜2で提案されているチャック装置では、備えるスライドヘッドの数を増やせば増やすほど、これらを駆動するシリンダの数も増やす必要があり、装置の大型化およびコストの上昇を招いてしまう。
一方、上記特許文献3〜4で提案されているチャック装置では、ラック・アンド・ピニオン機構を用いることにより、一のシリンダにより3つの爪を同期させた状態でスライド駆動させることができる。しかし、上記特許文献3〜4で提案されているチャック装置では、3つのヘッド(爪)のスライド速度が同一であるので、ワークの形状に応じてラック・アンド・ピニオン機構の構造やヘッド形状の変更が必要となり、汎用性に欠ける。また、この装置では、ワークの形状によっては、スライド速度を上げて行った場合に、ワークが正確に位置決めされないままにチャックされるという事態が生じ得る。
【0007】
本発明は、上記のような問題の解決を図るべくなされたものであって、一の駆動源により複数のヘッドを移動させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能なチャック装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、次の構成を採用する。
本発明に係るチャック装置は、複数のヘッドにより対象ワークをチャックする装置であって、次に示す要素を構成中に少なくとも含む。
・ベース;装置の基準となる。
・第1および第2のヘッド;上記複数のヘッドに含まれ、ベースに対してそれぞれ移動自在(スライド自在あるいは搖動自在)に取り付けられている。
【0009】
・第1のプーリ;第1のヘッドに取り付けられている。
・第2のプーリ;第2のヘッドに取り付けられている。
・線状伝達部材;屈曲自在性を有し、一端がベースに固定され、当該一端(固定端)から順に第1のプーリおよび第2のプーリを経由して張設されている。
・駆動力発生源;ベースに取り付けられ、線状伝達部材における第1のプーリおよび第2のプーリに掛けられた箇所(経由箇所)を挟んで上記固定端とは反対側の一の箇所を、送り出しまたは引き戻しを実行する。
【0010】
・張設状態保持部;線状伝達部材に対して、上記固定端から上記一の箇所までの張設状態を保持する。
そして、本発明に係るチャック装置は、駆動力発生源からの駆動力が線状伝達部材を介して第1および第2のプーリへと伝達され、当該第1および第2のプーリのそれぞれが動滑車として機能することにより、第1および第2のヘッドのそれぞれが対象ワークに向け移動する。ここで、本発明に係るチャック装置では、その駆動において、第1のプーリおよび第2のプーリは、動滑車として機能しているので、第1のヘッドと第2のヘッドとは時間的にズレを有して移動し、線状伝達部材の変位に応じて移動する。
【発明の効果】
【0011】
本発明に係るチャック装置では、一の駆動力発生源により、線状伝達部材が各プーリに張設された第1および第2のヘッドを時間的にズレを有した状態で連動して移動(スライドあるいは搖動)させることができる。このため、本発明に係るチャック装置では、ヘッドごとに駆動力発生源を設ける場合に比べて、装置のコストを低減することができる。また、本発明に係るチャック装置では、上述のように一の駆動力発生源により第1および第2のヘッドをスライドさせることができるので、上記特許文献1〜2で提案されているチャック装置のようにヘッド毎に駆動力発生源を設ける場合に比べて、第1のヘッドと第2のヘッドとの間での駆動タイミングや駆動力の調整といった煩雑な作業を必要としない。
【0012】
また、本発明に係るチャック装置では、第1のヘッドに取り付けられた第1のプーリと、第2のヘッドに取り付けられた第2のプーリとが、線状伝達部材の張設により動滑車として機能するので、第1のヘッドと第2のヘッドのうち線状伝達部材の固定端に近い側にプーリが配されている側のヘッドからスライドが開始されることになる。そして、先に移動を開始したヘッドが対象ワークに当接した時点からもう一方のヘッドが移動を開始することになる。なお、後に移動を開始した側のヘッドが移動している途中においては、先に対象ワークに当接したヘッドは対象ワークを強くチャックしているものではなく、対象ワークが多少移動することを許容する。このため、後から移動を開始したヘッドが対象ワークに当接するまでの間では、対象ワークは多少移動することができ、チャック完了の際の正確な位置決めができる。
【0013】
また、本発明に係るチャック装置では、複数のヘッドの内の第1および第2のヘッドが上記のように移動するので、対象ワークのサイズや形状が多少変化しても、ヘッドなどの交換を必要とすることなくチャック動作が可能である。
なお、本発明に係るチャック装置では、線状伝達部材の張設状態を保持するために張設状態保持部が設けられているので、線状伝達部材が固定端から上記一の箇所に至るまでの経路中で弛みを生じることはなく、上記のような第1および第2のヘッドの移動を確実に実行させることができる。ここで、張設状態保持部の具体例としては、例えば、第1のヘッドおよび第2のヘッドのそれぞれに、上記第1のプーリおよび第2のプーリとは異なるプーリをそれぞれ設けておき、これらを線状伝達部材で引っ張っておくという構成や、第1のヘッドおよび第2のヘッドをそれぞれスプリングなどの弾性部材で引っ張っておくというような構成を採用することができる。引っ張り方向は、駆動力発生源による第1のヘッドおよび第2のヘッドの各スライド方向とは反対側である。
【0014】
以上のように、本発明に係るチャック装置では、一の駆動源により複数のヘッドを移動させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能である。
なお、本発明に係るチャック装置とは、対象ワークを把持する機構を有する装置であり、ロボットチャックのような装置の他、コンベヤ上で対象ワークを切り出しや位置決めを行うために一旦、対象ワークを把持するような装置も含む概念で用いている。
【発明を実施するための最良の形態】
【0015】
以下では、本発明を実施するための最良の形態について、図面を参酌しながら説明する。なお、以下の説明に係る実施の形態は、本発明の構成上の特徴および当該特徴的構成から奏される作用効果を分かりやすく説明するための一例として用いるものであって、本発明は、その技術的な本質的特徴部分を除き、以下の内容に何ら限定を受けるものではない。
[実施の形態1]
1.全体構成
本実施の形態に係るスライド型チャック装置(以下、単に「チャック装置」と記載する。)1の全体構成について、図1を用い説明する。
【0016】
図1に示すように、チャック装置1では、上層プレート11と下層プレート12との間に複数の支柱13が架設されている。チャック装置1では、上層プレート11と下層プレート12、および支柱13により、装置の基準となるベースが構成されている。上層プレート11におけるZ軸方向上側主面には、4つのスライドヘッド21〜24が配されている。4つのスライドヘッド21〜24は、それぞれ上層プレート11に固定された直線状のガイドレール31〜34にスライド自在に取り付けられている。
【0017】
上層プレート11には、ガイドレール31〜34の各々に沿って、長穴11a〜11dが開けられている。この長穴11a〜11dは、各スライドヘッド21〜24のアームの通過のために設けられている。各スライドヘッド21〜24の構成については、後述する。チャック装置1が把持しようとするワーク900は、上層プレート11の略中心であって、各ガイドレール31〜34の交差部分に載置され、4つのスライドヘッド21〜24により把持される。
【0018】
複数の支柱13の架設により設けられた上層プレート11と下層プレート12との間の空間には、駆動力発生源としてのモータが収納されている(図1では、図示を省略)。モータには、円筒状のドラム51がZ軸に対して直交する方向を中心軸として設けられ、その直上に振り分けローラ52が設けられている。
各支柱13には、上層プレート11の主面上に配された各スライドヘッド21〜24に対応して、プーリ41a,41b,44a,44b,・・・が回転自在に設けられ、また、支柱13と支柱13との間にも各スライドヘッド21〜24に対応して、プーリ41c,44c,・・・が回転自在に設けられている。なお、図1では、スライドヘッド22,23に対応するプーリについては図示を省略している。
【0019】
各プーリ41a〜41c,44a〜44c,・・・は、Z軸方向に2層構造を有する。
チャック装置1では、3本のワイヤ61,62,63が用いられている。ワイヤ61は、ドラム51に複数回巻回されており、振り分けローラ52を介して、一方がプーリ41a,41b側へと延伸され、他方がプーリ44b,44a側へと延伸されている。ワイヤ62は、プーリ41cに掛けられ、両端がX軸方向に延伸され、ワイヤ63は、プーリ44cに掛けられ、両端がY軸方向に延伸されている。ワイヤ62とワイヤ63とは、それぞれプーリ41cの下側部分とプーリ44cの上側部分に掛けられることにより、互いに接触しないようになっている。
【0020】
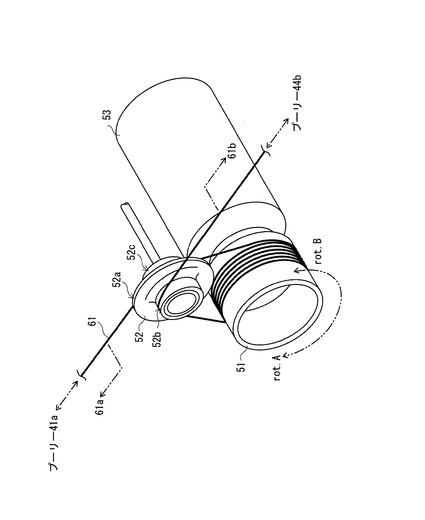
2.モータ53およびその周辺部の構成
チャック装置1の構成の内、モータ53およびその周辺部の構成について、図2を用い説明する。
図2に示すように、モータ53には、その回転軸に円筒状のドラム51が取り付けられている。そして、ドラム51の上方には、モータ53の回転軸と平行な軸を中心軸とする振り分けローラ52が設けられている。図示を省略しているが、振り分けローラ52は、下層プレート12に立設されたプレートなどに軸支されている。
【0021】
振り分けローラ52は、軸方向の中央部分が他の部分52b,52cよりも大径の鍔部分52aを有する。ドラム51の円周方向に複数回巻回されたワイヤ61は、一方が振り分けローラ52の部分52cに掛けられてプーリ41aの側へと延伸され、他方が振り分けローラ52の部分52bに掛けられてプーリ44bの側へと延伸されている。
チャック装置1では、モータ53の回転軸が一の方向rot.Aへと回転するとき、ワイヤ61におけるプーリ41aの側へと延伸する部分61aがドラム51の側へと引き戻され、プーリ44bへと延伸する部分61bが送り出される。
逆に、モータ53の回転軸が他の方向rot.Bへと回転するとき、ワイヤ61におけるプーリ41aの側へと延伸する部分61aが送り出され、プーリ44bへと延伸する部分61bがドラム51の側へと引き戻される。
【0022】
チャック装置1では、上述のように、モータ53の回転方向を制御することにより、ワイヤ61の送り出しと引き戻しを実行できる。
3.スライドヘッド21〜24の構成
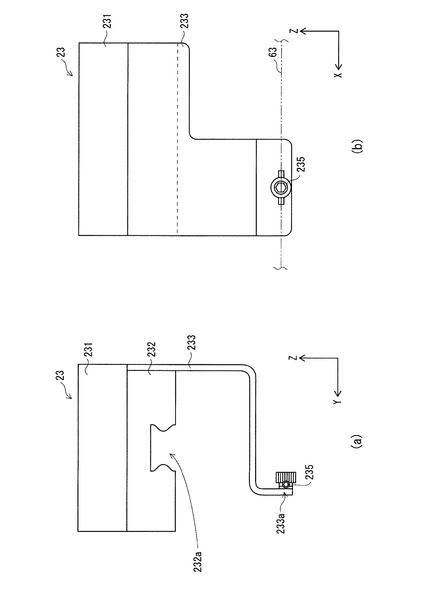
スライドヘッド21〜24の構成について、図3および図4を用い説明する。図3(a)は、スライドヘッド21の正面図であり、図3(b)は、スライドヘッド21の側面図である。図4(a)は、スライドヘッド23の正面図であり、図4(b)は、スライドヘッド23の側面図である。
【0023】
先ず、図3(a)に示すように、スライドヘッド21は、ヘッド本体211と、そのZ軸方向下側に接合されたガイド212、ガイド212のY軸方向右側に接合されたアーム213とを有する。また、スライドヘッド21は、アーム213に対して回転自在に取り付けられたプーリ214およびZ軸方向下端213aに取り付けられたワイヤ止め金具215も有している。
【0024】
スライドヘッド21におけるガイド212には、ガイドレール31を受けるガイド溝212aが設けられている。また、プーリ214は、上部要素214aと下部要素214bとの2層構造を有し、クランク状に曲折加工されたアーム213の中程に回転自在に取り付けられている。
図3(b)に示すように、プーリ214には、上下に分けてワイヤ61が掛けられている。一方が延伸部分61aであり、他方が延伸部分61bである。また、アーム213の下端213aに取り付けられたワイヤ止め金具215には、X軸方向の両方向にワイヤ63が止められている。
【0025】
なお、スライドヘッド22については、図3(a)および図3(b)に示すスライドヘッド21と同様の構成を有するので、図示および説明を省略する。
次に、図4(a)に示すように、スライドヘッド23は、ヘッド本体231と、そのZ軸方向下側に接合されたガイド232、ガイド232のY軸方向右側に接合されたアーム233とを有する。スライドヘッド23では、上記スライドヘッド21,22と異なり、アーム233にはプーリが取り付けられておらず、Z軸方向下端233aにワイヤ止め金具235が取り付けられている。ガイド232におけるガイド溝232aについては、上記スライドヘッド21,22と同様である。
【0026】
図4(b)に示すように、スライドヘッド23におけるワイヤ止め金具235には、ワイヤ63が止められており、上記スライドヘッド21にワイヤ63を介して連結されている。
なお、スライドヘッド24については、スライドヘッド23と同様の構成を有するが、図1に示すように、ワイヤ62を介してスライドヘッド22と連結されている。
【0027】
4.スライドヘッド21〜24のスライド駆動
スライドヘッド21〜24のスライド駆動の形態について、図5および図6を用い説明する。
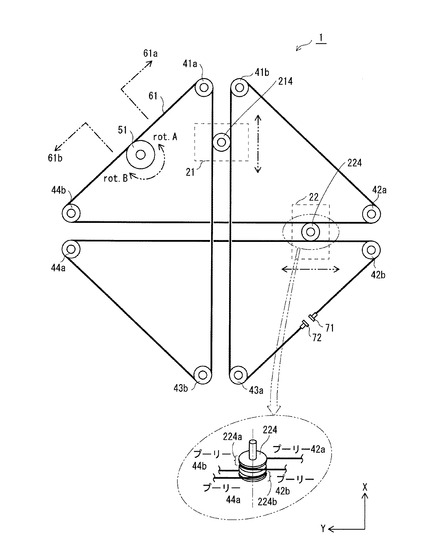
4−1.スライドヘッド21,22のスライド駆動
先ず、スライドヘッド21,22のスライド駆動について、図5を用い説明する。図5では、チャック装置1におけるスライドヘッド21,22と、ドラム51と、プーリ41a,41b,42a,42b,43a,43b,44a,44bおよびワイヤ61との配設関係と、スライドヘッド21,22のスライド駆動形態とを模式的に示す。
【0028】
図5に示すように、ワイヤ61におけるドラム51からの一方の延伸部分61aは、プーリ41a、プーリ214、プーリ41b、プーリ42a、プーリ224、プーリ42bの順に経由して、ベースの一部である上層プレート11(図1を参照。)の下面に固定されたワイヤ止め金具71に端部が止められている。
一方、ワイヤ61におけるドラム51からのもう一方の延伸部分61bは、プーリ44b、プーリ224、プーリ44a、プーリ43b、プーリ214、プーリ43aの順に経由して、ベースの一部である上層プレート11(図1を参照。)の下面に固定されたワイヤ止め金具72に端部が止められている。
【0029】
図5の二点鎖線で囲んだ部分に示すように、スライドヘッド22におけるプーリ224は上下2層構造を有しており、プーリ42a,42bを介して張設されたワイヤ61の延伸部分61aは、上層224aに掛けられ、プーリ44b,44aを介して張設されたワイヤ61の延伸部分61bは、下層224bに掛けられている。よって、ワイヤ61における延伸部分61aと延伸部分61bとが、スライドヘッド22におけるプーリ224で接触することはない。なお、スライドヘッド21においても同様の構成を採用しており、ワイヤ61における延伸部分61aと延伸部分61bとが接触することはない。
【0030】
チャック装置1では、モータ53に取り付けられたドラム51が一方向rot.Aに回転する場合、ドラム51からの延伸部分61aはドラム51の側へと引き戻され、延伸部分61bは送り出されることになる。他方、ドラム51が他の方向rot.Bに回転する場合、ドラム51からの延伸部分61aは送り出されることになり、延伸部分61bはドラム51の側へと引き戻されることになる。
【0031】
図5に示すように、チャック装置1におけるプーリ214,224は、ワイヤ61およびプーリ41a,41b,42a,42b,43a,43b,44a,44b、さらにはドラム51および固定端(ワイヤ止め金具71,72で止められた端部)との関係で、動滑車として機能し、スライドヘッド21,22が、それぞれX軸方向およびY軸方向にスライド駆動する。
【0032】
例えば、ドラム51が方向rot.Aに回転する場合には、スライドヘッド21がX軸方向上向きにスライド駆動し、スライドヘッド22がY軸方向右向きにスライド駆動する。即ち、ドラム51が方向rot.Aに回転する場合には、図1に示す上層プレート11の中央部分から各スライドヘッド21,22が後退するようにスライド駆動する。ここで、ドラム51が方向rot.Aに回転する場合におけるスライドヘッド21とスライドヘッド22とのスライド駆動の開始順序は、ワイヤ61の延伸方向61aに沿って、ワイヤ61における引き戻される延伸部分61aの固定端(ワイヤ止め金具71で止められた端部)に近い側のプーリ224を有するスライドヘッド22が先にスライド駆動を開始する。そして、スライドヘッド22がストッパ(図示を省略。)などに当接するなどしてスライドが停止された後、スライドヘッド21がスライド駆動を開始する。
【0033】
ドラム51が方向rot.Bに回転する場合には、先ず、スライドヘッド21がX軸方向下向きにスライド駆動し、スライドヘッド21がワーク900(図1を参照。)に当接した後に、スライドヘッド22がスライド駆動を開始する。ここで、スライドヘッド21がワーク900に当接した後に、スライドヘッド22がスライド駆動を開始した場合においても、ワーク900はスライドヘッド21,23により強い力で押圧(挟持作用)を受けているのではなく、スライドヘッド22,24のスライド駆動が終了するまではワーク900が多少動き得る状態にある。このため、チャック装置1では、ワーク900を正確に位置決めすることが可能である。
【0034】
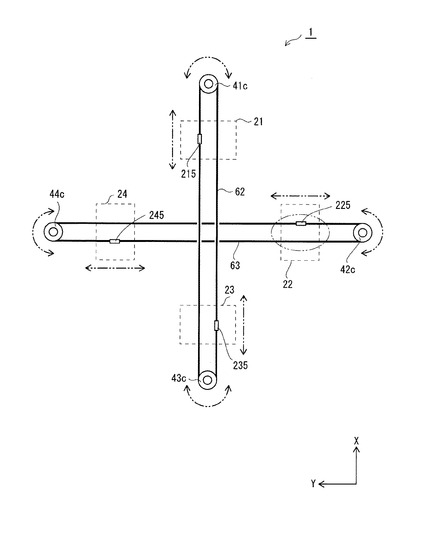
4−2.スライドヘッド23,24のスライド駆動
スライドヘッド23,24のスライド駆動の形態について、図6を用い説明する。図6では、チャック装置1におけるスライドヘッド23,24およびプーリ41c,42c,43c,44cの配設関係と、スライドヘッド23,24のスライド駆動形態とを模式的に示す。
【0035】
図6に示すように、スライドヘッド21,23のスライド駆動範囲よりも、X軸方向のさらに外側にプーリ41c,43cが設けられている。同様に、スライドヘッド22,24のスライド駆動範囲よりも、Y軸方向のさらに外側にプーリ42c,44cが設けられている。プーリ41c,42c,43c,44cは、ベースの一部を構成する支柱13の高さ方向中程に取り付けられている。
【0036】
プーリ41cとプーリ43cとを周回する状態に環状のワイヤ62が張設されており、同様に、プーリ42cとプーリ44cとを周回する状態に環状のワイヤ63が張設されている。ワイヤ62では、ワイヤ止め金具215によりスライドヘッド21に取り付けられており、ワイヤ止め金具235によりスライドヘッド23に取り付けられている。同様に、ワイヤ63では、ワイヤ止め金具225によりスライドヘッド22に取り付けられており、ワイヤ止め金具245によりスライドヘッド24に取り付けられている。
【0037】
スライドヘッド21とスライドヘッド23とは、上層プレート11(図1を参照。)の中央部分に対して対象になるように、ワイヤ62に対し取り付けられており、スライドヘッド22とスライドヘッド24についても同様の関係でワイヤ63に取り付けられている。
図6に示すように、スライドヘッド22とスライドヘッド24とは、スライドヘッド21およびスライドヘッド22に対して、定滑車の原理に基づき従動することになる。
【0038】
例えば、スライドヘッド21がX軸方向下向きにスライド駆動する場合には、同一の変位でスライドヘッド23がX軸方向上向きにスライド駆動する。同様に、スライドヘッド22がY軸方向左向きにスライド駆動する場合には、同一の変位でスライドヘッド24がY軸方向右向きにスライド駆動する。
以上のようにして、チャック装置1では、モータ53の回転駆動に伴い、4つのスライドヘッド21〜24がスライド駆動し、ワーク900のチャック(把持)またはリリース(解放)が実行される。
【0039】
4−3.モータ53の制御
本実施の形態に係るチャック装置1では、モータ53として、ホールセンサを備える電動モータを採用しており、モータ53に対してPWM制御方式を以って電力供給を実行する。なお、モータ53の駆動制御を行う制御部については、一般的な制御回路を備える部分であり、図示および詳細な説明を省略する。
【0040】
チャック装置1では、ワーク900を4つのスライドヘッド21〜24で把持した状態において、モータ53が一定の時間、回転せず、ホールセンサからの信号が予め設定された時間を超えて検知されない場合には、制御部は、モータ53に対し供給する電力のパルス幅を、それよりも前に比べて狭くしてワーク900の把持状態を維持する。
なお、上記予め設定の時間については、モータ53の大きさやチャック装置1に求められるチャック速度などにより規定されるものである。また、本持実施の形態では、ホールセンサからの信号が予め設定された時間を超えて検知されない場合に供給電力のパルス幅を狭くすることとしたが、逆に広くすることも可能である。この場合には、ワーク900を把持する力を増大させることができる。
【0041】
5.チャック装置1が有する優位性
本実施の形態に係るチャック装置1では、一のモータ53により、4つのスライドヘッド21〜24を連動してスライド駆動させることができる。このため、チャック装置1では、スライドヘッドごとに空圧シリンダやモータなどの駆動力発生源を設ける場合に比べて、装置のコストを低減することができる。
【0042】
また、チャック装置1では、一のモータ53により4つのスライドヘッド21〜24を連動させてスライド駆動させることができるので、上記特許文献1〜2で提案されているチャック装置のようにスライドヘッド毎に駆動力発生源を設ける場合に比べて、スライドヘッド21〜24間での駆動タイミングや駆動力の調整といった煩雑な作業を必要としない。
【0043】
また、チャック装置1では、スライドヘッド21に取り付けられたプーリ214と、スライドヘッド22に取り付けられたプーリ224とが、ワイヤ61などとの関係により動滑車として機能するので、スライドヘッド21とスライドヘッド22のうちワイヤ61の引き戻し側の固定端に近い側にプーリが配されている側のスライドヘッドからスライド駆動が開始されることになる。そして、先にスライド駆動を開始したスライドヘッド(スライドヘッド21またはスライドヘッド22)がワーク900に当接した時点から、もう一方のスライドヘッドがスライド駆動を開始することになる。なお、後にスライド駆動を開始した側のスライドヘッドがスライド駆動している途中においては、先にワーク900に当接したスライドヘッドとこれに従動するスライドヘッドは、ワーク900を強く挟持するものではなく、ワーク900が多少移動することを許容する。このため、後からスライド駆動を開始したスライドヘッドがワーク900に当接するまでの間では、ワーク900は多少移動することができ、チャック完了の際の正確な位置決めができる。
【0044】
また、チャック装置1では、4つのスライドヘッド21〜24の内、スライドヘッド21,22が上記のようにスライド駆動し、これにスライドヘッド23,24が従動するので、ワーク900のサイズや形状が多少変化しても、スライドヘッド21〜24などの交換を必要とすることなくチャック動作が可能である。
なお、スライドヘッド21,22をそれぞれスプリングなどの弾性部材により、ワイヤ61が掛けられている方向とは反対向きに引っ張る構成を採用することでも、ワイヤ61の張設状態を保持することが可能である。
【0045】
以上のように、本実施の形態に係るチャック装置1では、一のモータ53により4つのスライドヘッド21〜24をスライド駆動させてワーク900をチャックすることができるとともに、ワーク900の形状やサイズが多少変化しても、正確に位置決めされた状態でワーク900をチャックすることが可能である。
[実施の形態2]
実施の形態2に係るスライド型チャック装置(以下では、単に「チャック装置」と記載する。)2について、図7を用い説明する。
【0046】
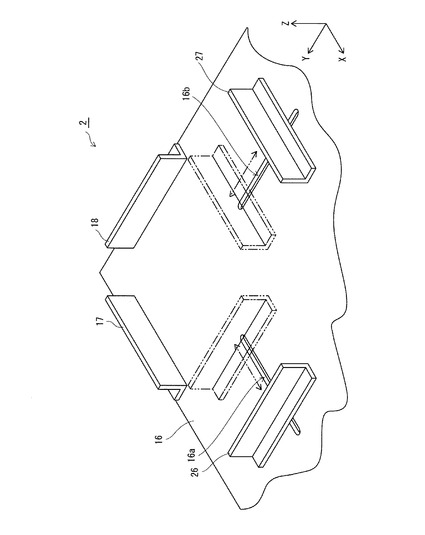
図7に示すように、チャック装置2では、ベースプレート16におけるZ軸方向上面に、2つの固定ブロック17,18が固定されている。2つの固定ブロック17,18は、ともにアングル状をしており、固定ブロック17はX軸方向に延設され、固定ブロック18はY軸方向に延設されている。
一方、チャック装置2では、ベースプレート16に対して、X軸方向またはY軸方向にスライド駆動する2つのスライドヘッド26,27が設けられている。なお、スライドヘッド26.27は、上記実施の形態1に係るチャック装置1のスライドヘッド21,22などと同様に、ガイドレールに取り付けられて、スライド自在となっているのであるが、チャック装置2では、ガイドレールはベースプレート16におけるZ軸方向下面(裏面)に設けられている。なお、スライドヘッド26,27は、ベースプレート16に設けられた長穴16a,16bをそれぞれ介して、スライド機構部分に接合されている。
【0047】
スライドヘッド26,27におけるスライド駆動に係る構成は、上記実施の形態1に係るチャック装置1におけるスライドヘッド21,22と同様であり、図5に示すのと同様の形態を備える。
本実施の形態に係るチャック装置2は、例えば、搬送用パレットなどを対象ワークとするものであって、ベースプレート16上において、2つのスライドヘッド26,27のスライド駆動により、対象ワークである搬送用パレットが2つの固定ブロック17,18に当接するように追い込まれて行き、2つの固定ブロック17,18と2つのスライドヘッド26,27により位置決めされ、把持される。
【0048】
本実施の形態に係るチャック装置2では、スライドヘッド26,27のスライド駆動のためのガイドレールをベースプレート16の裏側に設置しているので、搬送用パレットがスライドヘッド26,27により移動される際に、ワークである搬送用パレットがガイドレールに引っ掛ることがない。
実施の形態2に係るチャック装置2も、上記実施の形態1に係るチャック装置1と基本的に同一構成を有するので、上記同様の優位性を有する。
[実施の形態3]
1.全体構成
実施の形態3に係るスライド型チャック装置(以下では、単に「チャック装置」と記載する。)3の全体構成について、図8を用い説明する。
【0049】
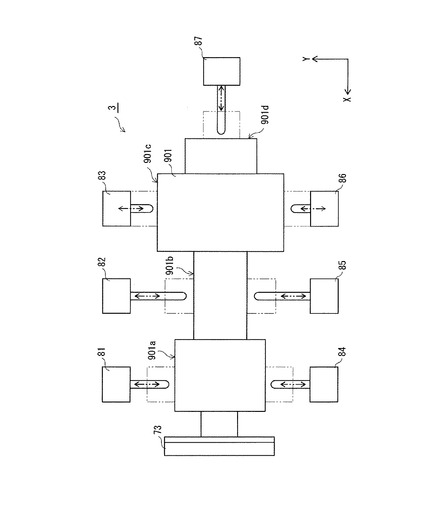
図8に示すように、本実施の形態に係るチャック装置3は、ベース(図示を省略。)に対して、1つの固定ブロック73と、7つのスライドヘッド81〜87を備える。そして、チャック装置3がチャック対象としているワーク901は、X軸方向に長軸の形状をしており、X軸方向における箇所に応じて、Y軸方向の幅が異なる複数の部分が一体に形成されてなる。
【0050】
固定ブロック73は、上記実施の形態2に係るチャック装置2の固定ブロック17,18などと同様に、アングル状をしており、ベースに固定されている。
7つのスライドヘッド81〜87の内、6つのスライドヘッド81〜86は、Y軸方向にスライド駆動できるようになっており、残りの1つのスライドヘッド87は、X軸方向にスライド駆動できるようになっている。スライドヘッド81〜83は、対向するスライドヘッド84〜86とでワーク901をY軸方向に挟持し、スライドヘッド87は、対向して設けられた固定ブロック73とでワーク901をX軸方向に挟持できる。
【0051】
2.スライドヘッド81〜83,87のスライド駆動
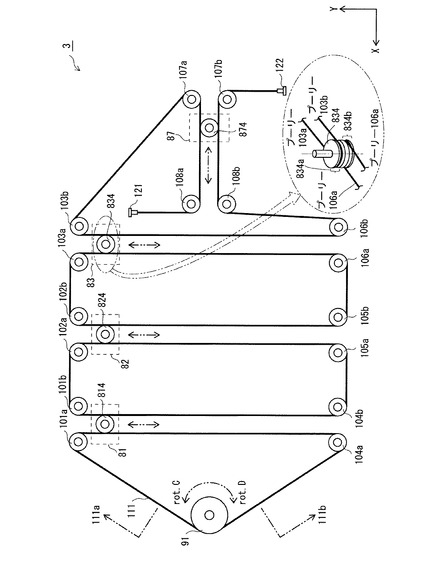
チャック装置3におけるスライドヘッド81〜83,87のスライド駆動の形態について、図9を用い説明する。
図9に示すように、チャック装置3では、上記実施の形態1に係るチャック装置1と同様に、モータの回転軸に取り付けられたドラム91にワイヤ111が一巻き以上巻回されている。ワイヤ111は、ドラム91から2方向に延伸されている(延伸部分111aおよび延伸部分111b)。
【0052】
ワイヤ111における一方の延伸部分111aは、ドラム91の側から順に、プーリ101a、プーリ814、プーリ101b、プーリ102a、プーリ824、プーリ102b、プーリ103a、プーリ834、プーリ103b、プーリ107a、プーリ874、プーリ107bを経由してワイヤ止め金具122によりベースに端部が固定されている。
ワイヤ111におけるもう一方の延伸部分111bは、ドラム91の側から順に、プーリ104a、プーリ814、プーリ104b、プーリ105a、プーリ824、プーリ105b、プーリ106a、プーリ834、プーリ106b、プーリ108b、プーリ874、プーリ108aを経由してワイヤ止め金具121によりベースに端部が固定されている。
【0053】
図9の二点鎖線で囲んだ部分に示すように、チャック装置3においても、各スライドヘッド81〜87に設けられたプーリ814〜874は、それぞれ二層構造(例えば、プーリ834の場合、上層834aと下層834bとを有する。)になっており、ワイヤ111における延伸部分111aと延伸部分111bとが接触しないようになっている。
図9に示すように、チャック装置3においても、ドラム91の回転(方向rot.C、方向rot.D)に応じて、動滑車の原理により、スライドヘッド81〜83,87のスライド駆動が実行される。スライドヘッド81〜83,87は、同時にスライド駆動を開始するのではなく、上記実施の形態1で説明したように、引き戻し側における固定端に近いスライドヘッドからスライド駆動を開始する。
【0054】
3.スライドヘッド84〜86のスライド駆動
スライドヘッド84〜86のスライド駆動の形態について、図10を用い説明する。
図10に示すように、本実施の形態に係るチャック装置3においても、スライドヘッド84〜86は、スライドヘッド81〜83に従動する。即ち、チャック装置3におけるベースには、スライドヘッド81およびスライドヘッド84に対応してプーリ101c,104cが設けられ、スライドヘッド82およびスライドヘッド85に対応してプーリ102c,105cが設けられ、スライドヘッド83およびスライドヘッド86に対応してプーリ103c,106cが設けられている。
【0055】
上記実施の形態1に係るチャック装置1と同様に、環状のワイヤ112がプーリ101cとプーリ104cに掛けられ、環状のワイヤ113がプーリ102cとプーリ105cに掛けられ、環状のワイヤ114がプーリ103cとプーリ106cに掛けられている。そして、スライドヘッド81,84は、それぞれワイヤ112に対してワイヤ止め金具815,845により取り付けられている。同様に、スライドヘッド82,85は、それぞれワイヤ113に対してワイヤ止め具825,855により取り付けられ、スライドヘッド83,86は、それぞれワイヤ114に対してワイヤ止め金具835,865により取り付けられている。
【0056】
図10に示す構成により、チャック装置3でも、スライドヘッド84〜86は、それぞれスライドヘッド81〜83に従ってスライド駆動する。
以上のような構成を採用することにより、本実施の形態に係るチャック装置3では、図8に示すようなチャックしようとする側面に凹凸を有するようなワーク901に対しても、正確に位置決めした状態で把持することが可能となる。
【0057】
なお、本実施の形態に係るチャック装置3においても、スライドヘッド81〜87のスライド駆動に係る基本構成は上記実施の形態1,2に係るチャック装置1,2と同様であるので、上記優位性をそのまま有する。
[変形例]
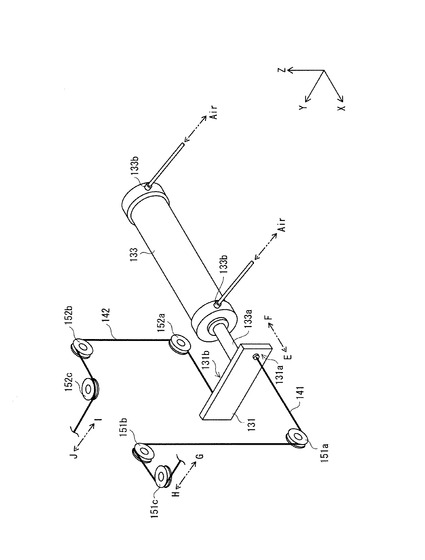
変形例に係るスライド型チャック装置の構成について、図11を用い説明する。図11では、本変形例に係るスライド型チャック装置で最も特徴を有する駆動力発生源について、図示している。
【0058】
図11に示すように、本変形例に係るスライド型チャック装置では、駆動力発生源として直動タイプの空圧シリンダ133を備える。空圧シリンダ133のロッド133aには可動プレート131が取り付けられており、可動プレート131には、二本のワイヤ141,142が接合されている。
二本のワイヤ141,142の内のワイヤ141は、可動プレート131におけるX軸方向左手前側の主面131aに接合されており、プーリ151a,151b,151cなどを経由して延伸されている。
【0059】
一方、もう一本のワイヤ142は、可動プレート131におけるX軸方向右奥側の主面131bに接合されており、プーリ152a,152b,152cなどを経由して延伸されている。
本変形例に係るスライド型チャック装置では、給排気ポート133bから空気の出し入れを行うことにより、空圧シリンダ133のロッド133aを方向E,Fの方向に往復させることができる。そして、可動プレート131の往復に伴い、ワイヤ141,142の送り出し、引き戻し(方向G〜J)がなされる。
【0060】
本変形例に係るスライド型チャック装置では、直動タイプの空圧シリンダ133を駆動力発生源として採用し、上記実施の形態1〜3に係るスライド型チャック装置1〜3と同様のチャック動作を行うことができる。そして、本変形例に係るスライド型チャック装置においても、駆動力発生源が異なるだけであって、上記実施の形態1〜3に係るスライド型チャック装置1〜3と同様の優位性を有する。
[実施の形態4]
1.全体構成
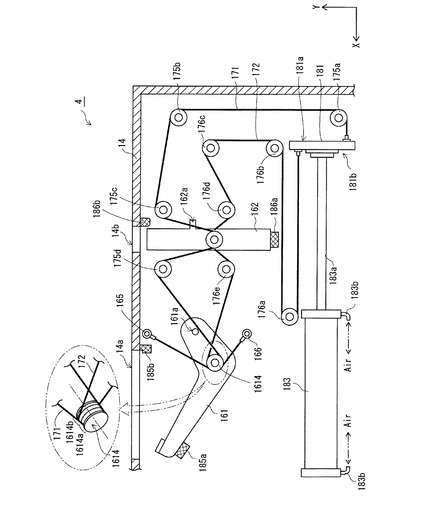
実施の形態4に係る搖動型チャック装置4の構成について、図12を用い説明する。図12は、搖動型チャック装置4の構成を示す模式断面図である。
【0061】
図12に示すように、筐体14の内方に、搖動ヘッド161、スライドヘッド162、およびエアシリンダ183が収納されている。この内、搖動ヘッド161は、略L字状をしており、その一端部分の一点を支点(搖動中心161a)として搖動自在となっている。一方、スライドヘッド162は、上記実施の形態1に係るスライド型チャック装置1などと同様に、ガイドレール(不図示)に取り付けられており、Y軸方向に沿ってスライド自在となっている。なお、搖動ヘッド161の搖動範囲は、ストッパ185aとストッパ185bとで規定され、スライドヘッド162のスライド範囲は、ストッパ186aおよびストッパ186bにより規定される。ここで、スライドヘッド162には、鍔状部分162aが設けられており、スライドヘッド162がY軸方向上限に位置する場合に、鍔状部分162aがストッパ186bに当接することになる。
【0062】
搖動ヘッド161およびスライドヘッド162の各々には、プーリ1614,1624が取り付けられている。プーリ1614は、二点鎖線で囲んだ部分に示すように、要素1614aと要素1614bとの2層構造を有している。なお、図示はしていないが、スライドヘッド162におけるプール1624についても、同様に2層構造を有している。
筐体14には、Y軸方向上側の壁に、二箇所の開口14a、14bが設けられている。開口14aは、搖動ヘッド161が搖動した際に、筐体14に接触することがないように設けられており、開口14bは、スライドヘッド162がY軸方向上向きにスライド駆動した際に、筐体14に接触することがないように設けられている。
【0063】
エアシリンダ183には、ロッド183aの先端に可動プレート181が取り付けられている。可動プレート181の一方の主面181aには、ワーや171の一端が取り付けられており、他方の主面181bには、ワイヤ172の一端が取り付けられている。可動プレート181は、エアシリンダ183に対し、その給排気ポート183bから空気の出し入れを行うことにより、X軸方向の左右に駆動する。
【0064】
可動プレート181の主面181aに一端が取り付けられたワイヤ171は、プーリ175a、プーリ175b、プーリ175c、プーリ1624、プーリ175d、およびプーリ1614を経由して、ワイヤ止め金具165により筐体14に他端が固定されている。一方、可動プレート181の主面181bに一端が取り付けられたワイヤ172は、プーリ176a、プーリ176b、プーリ176c、プーリ176d、プーリ1624、プーリ176e、およびプーリ1614を経由して、ワイヤ止め金具166により筐体14に他端が固定されている。
【0065】
プーリ175a〜175d、およびプーリ176a〜176eは、筐体14に対して中心軸が回転自在に取り付けられている。
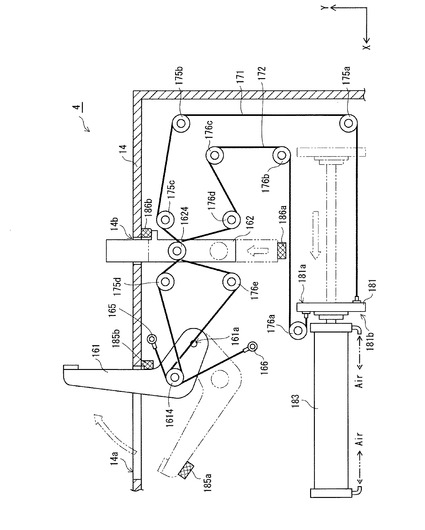
2.搖動ヘッド161およびスライドヘッド162の駆動
搖動型チャック装置4の駆動形態について、図12と図13とを用い説明する。
本実施の形態に係る搖動型チャック装置4では、図12に示す状態から、エアシリンダ183を駆動させて可動プレート181をX軸方向左側に向けて移動させる。これに伴い、ワイヤ171は引き戻され、ワイヤ172は送り出されることになる。なお、ワイヤ171およびワイヤ172は、ともに共通の可動プレート181に一端が取り付けられているので、同一の変位となる。
【0066】
図13に示すように、ワイヤ171の引き戻しと、ワイヤ172の送り出しにより、まずワイヤ171の固定端であるワイヤ止め金具165に近い搖動ヘッド161が搖動し始める。そして、搖動ヘッド161の搖動が終わると、次にスライドヘッド162のスライドが始まる。これは、上述のように、搖動ヘッド161およびスライドヘッド162に取り付けられているプーリ1614,1624が動滑車として機能するためである。
【0067】
搖動型チャック装置4では、搖動ヘッド161とスライドヘッド162とにより、ワークのチャックや位置決め、あるいは切り出しなどを実行できる。
[その他の事項]
実施の形態1〜3では、駆動力発生源の一例として電動モータ53を採用し、変形例および実施の形態4では、空圧シリンダ133,183を採用したが、本発明は、これに限らず油圧シリンダや、ボールネジなどのネジ類が連結されたモータ、さらには空圧式または油圧式ロータリーアクチュエーターなどを採用することもできる。
【0068】
また、上記実施の形態1〜4および変形例では、線状伝達部材の一例としてワイヤ61,62,63,111,112,113,114,141,142,171,172を採用したが、チェーンやロープやベルトなどを採用することも勿論できる。なお、チェーンを用いる場合に比べて、ワイヤやベルトを用いる場合には、装置設計に係る自由度の高さ、装置サイズおよび重量、コストなどの観点から優位である。
【0069】
また、上記実施の形態1〜3に係るスライド型チャック装置1〜3および実施の形態4に係る搖動型チャック装置4では、1つのスライドヘッドあるいは搖動ヘッドに対して2方向からワイヤを掛けることとしたが、一方のワイヤを省略し、その代わりにスプリングなどの弾性体を用いて、スライドヘッドのプーリに掛けられたワイヤの張設状態を保持し、スライドヘッドを原点復帰させるという構成を採用することもできる。
【0070】
また、上記実施の形態4では、一つの搖動ヘッド161と一つのスライドヘッド162とを備える搖動型チャック装置4を一例としたが、搖動ヘッドの数などについては、これに限定を受けるものではない。例えば、二つ、あるいはそれ以上の搖動ヘッドを有し、それら搖動ヘッドの搖動によりワークをチャックする形態を採用することもできる。
【産業上の利用可能性】
【0071】
本発明は、ワークのサイズおよび形状に多少の変化がある場合にも、正確な位置決めを行いながらワークをチャックすることができるチャック装置を実現するのに有用である。
【図面の簡単な説明】
【0072】
【図1】実施の形態1に係るスライド型チャック装置1の全体構成を示す模式斜視図である。
【図2】スライド型チャック装置1の構成要素の内のモータ53と、その周辺部の構成を示す模式斜視図である。
【図3】スライド型チャック装置1の構成要素の内のスライドヘッド21の構成を示す模式側面図である。
【図4】スライド型チャック装置1の構成要素の内のスライドヘッド23の構成を示す模式側面図である。
【図5】スライド型チャック装置1におけるスライドヘッド21,22のスライド駆動の形態を示す模式平面図である。
【図6】スライド型チャック装置1におけるスライドヘッド23,24のスライド駆動の形態を示す模式平面図である。
【図7】実施の形態2に係るスライド型チャック装置2の全体構成を示す模式斜視図である。
【図8】実施の形態3に係るスライド型チャック装置3の全体構成を示す模式平面図である。
【図9】スライド型チャック装置3におけるスライドヘッド81,82,83,87のスライド駆動の形態を示す模式平面図である。
【図10】スライド型チャック装置3におけるスライドヘッド84,85,86のスライド駆動の形態を示す模式平面図である。
【図11】変形例に係るスライド型チャック装置の駆動源としてのエアシリンダ133と、その周辺の要素とを示す模式斜視図である。
【図12】実施の形態4に係る搖動型チャック装置4の主要構成を示す模式断面図である。
【図13】搖動式チャック装置4の駆動形態を示す模式断面図である。
【符号の説明】
【0073】
1,2,3.スライド型チャック装置
4.搖動型チャック装置
11.上層プレート
12.下層プレート
13.支柱
14.筐体
16.ベースプレート
17,18,73.固定ブロック
21,22,23,24,26,27,81,82,83,84,85,86,87,162.スライドヘッド
31,32,33,34.ガイドレール
41a,41b,41c,42a,42b,42c,43a,43b,43c,44a,44b,44c,101a,101b,101c,102a,102b,102c,103a,103b,103c,104a,104b,104c,105a,105b,105c,106a,106b,106c,107a,107b,151a,151b,151c,152a,152b,152c,175a,175b,175c,175d,176a,176b,176c,176d,176e,214,224,814,824,834,874,1614,1624.プーリ
51,91.ドラム
52.振り分けローラ
61,62,63,111,112,113,114,141,142,171,172.ワイヤ
71,72,121,122,165,166,215,225,235,245,815,825,835,845,855,865.ワイヤ止め金具
131,181.可動プレート
133,183.エアシリンダ
161.搖動ヘッド
185a,185b,186a,186b.ストッパ
211,231.ヘッド本体
212,232.ガイド
213,233.アーム
900,901.ワーク
【技術分野】
【0001】
本発明は、チャック装置に関し、特に、一の駆動源により複数のヘッドを移動させて対象ワークをチャックするチャック装置に関する。
【背景技術】
【0002】
産業用ロボットや搬送装置などに代表される設備には、複数のヘッドをスライド駆動あるいは搖動させることによりワークをチャックしたり位置決めしたりするチャック装置が用いられている。チャック装置は、例えば、その一例が特許文献1〜4で提案されている。
特許文献1〜2では、放射状にスライド駆動自在に設けられた3つの爪(ヘッド)と、それぞれの爪に対してスライド駆動のために接続されたシリンダとを備えたスライド型のチャック装置が提案されている。この装置では、3つの爪のそれぞれに接続されたシリンダの駆動により3つの爪がスライド駆動されるので、大きな駆動力を以ってワークをチャックすることが可能である。
【0003】
また、特許文献3〜4では、上記特許文献1〜2で提案された装置と同様に、放射状にスライド駆動自在に設けられた3つの爪(ヘッド)を有し、これら3つの爪をラック・アンド・ピニオン機構を介して一のシリンダで駆動させるスライド型チャック装置が提案されている。この装置では、一のシリンダにより3つの爪をスライド駆動できるので、装置の小型化・軽量化を図ることができるとともに、3つの爪を互いに同期した状態でスライド駆動させることができる。
【特許文献1】特開平04−159092号公報
【特許文献2】特開平11−254370号公報
【特許文献3】特開平02−279292号公報
【特許文献4】特開平04−032299号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1〜2で提案されているチャック装置では、3つの爪の各々に対してシリンダが接続されており、これらのシリンダの駆動により3つの爪が各々独立した状態でスライド駆動するので、正確な位置決めを行いながらワークをチャックすることが困難である。即ち、この装置では、各シリンダ間での押圧力および駆動速度の相対的な関係により、ワークの位置が決定されてしまう。
【0005】
また、上記特許文献1〜2で提案されているチャック装置について、4つの爪が四方からワークをチャックする形態の装置に適用しようとする場合には、先にワークに当接した爪によりワークの動きが規制されてしまう。このため、この文献で提案されている構成では、遅れてワークに当接した爪によっては、実質的にワークの位置決めを行えないことも考えられる。
【0006】
また、上記特許文献1〜2で提案されているチャック装置では、備えるスライドヘッドの数を増やせば増やすほど、これらを駆動するシリンダの数も増やす必要があり、装置の大型化およびコストの上昇を招いてしまう。
一方、上記特許文献3〜4で提案されているチャック装置では、ラック・アンド・ピニオン機構を用いることにより、一のシリンダにより3つの爪を同期させた状態でスライド駆動させることができる。しかし、上記特許文献3〜4で提案されているチャック装置では、3つのヘッド(爪)のスライド速度が同一であるので、ワークの形状に応じてラック・アンド・ピニオン機構の構造やヘッド形状の変更が必要となり、汎用性に欠ける。また、この装置では、ワークの形状によっては、スライド速度を上げて行った場合に、ワークが正確に位置決めされないままにチャックされるという事態が生じ得る。
【0007】
本発明は、上記のような問題の解決を図るべくなされたものであって、一の駆動源により複数のヘッドを移動させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能なチャック装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、次の構成を採用する。
本発明に係るチャック装置は、複数のヘッドにより対象ワークをチャックする装置であって、次に示す要素を構成中に少なくとも含む。
・ベース;装置の基準となる。
・第1および第2のヘッド;上記複数のヘッドに含まれ、ベースに対してそれぞれ移動自在(スライド自在あるいは搖動自在)に取り付けられている。
【0009】
・第1のプーリ;第1のヘッドに取り付けられている。
・第2のプーリ;第2のヘッドに取り付けられている。
・線状伝達部材;屈曲自在性を有し、一端がベースに固定され、当該一端(固定端)から順に第1のプーリおよび第2のプーリを経由して張設されている。
・駆動力発生源;ベースに取り付けられ、線状伝達部材における第1のプーリおよび第2のプーリに掛けられた箇所(経由箇所)を挟んで上記固定端とは反対側の一の箇所を、送り出しまたは引き戻しを実行する。
【0010】
・張設状態保持部;線状伝達部材に対して、上記固定端から上記一の箇所までの張設状態を保持する。
そして、本発明に係るチャック装置は、駆動力発生源からの駆動力が線状伝達部材を介して第1および第2のプーリへと伝達され、当該第1および第2のプーリのそれぞれが動滑車として機能することにより、第1および第2のヘッドのそれぞれが対象ワークに向け移動する。ここで、本発明に係るチャック装置では、その駆動において、第1のプーリおよび第2のプーリは、動滑車として機能しているので、第1のヘッドと第2のヘッドとは時間的にズレを有して移動し、線状伝達部材の変位に応じて移動する。
【発明の効果】
【0011】
本発明に係るチャック装置では、一の駆動力発生源により、線状伝達部材が各プーリに張設された第1および第2のヘッドを時間的にズレを有した状態で連動して移動(スライドあるいは搖動)させることができる。このため、本発明に係るチャック装置では、ヘッドごとに駆動力発生源を設ける場合に比べて、装置のコストを低減することができる。また、本発明に係るチャック装置では、上述のように一の駆動力発生源により第1および第2のヘッドをスライドさせることができるので、上記特許文献1〜2で提案されているチャック装置のようにヘッド毎に駆動力発生源を設ける場合に比べて、第1のヘッドと第2のヘッドとの間での駆動タイミングや駆動力の調整といった煩雑な作業を必要としない。
【0012】
また、本発明に係るチャック装置では、第1のヘッドに取り付けられた第1のプーリと、第2のヘッドに取り付けられた第2のプーリとが、線状伝達部材の張設により動滑車として機能するので、第1のヘッドと第2のヘッドのうち線状伝達部材の固定端に近い側にプーリが配されている側のヘッドからスライドが開始されることになる。そして、先に移動を開始したヘッドが対象ワークに当接した時点からもう一方のヘッドが移動を開始することになる。なお、後に移動を開始した側のヘッドが移動している途中においては、先に対象ワークに当接したヘッドは対象ワークを強くチャックしているものではなく、対象ワークが多少移動することを許容する。このため、後から移動を開始したヘッドが対象ワークに当接するまでの間では、対象ワークは多少移動することができ、チャック完了の際の正確な位置決めができる。
【0013】
また、本発明に係るチャック装置では、複数のヘッドの内の第1および第2のヘッドが上記のように移動するので、対象ワークのサイズや形状が多少変化しても、ヘッドなどの交換を必要とすることなくチャック動作が可能である。
なお、本発明に係るチャック装置では、線状伝達部材の張設状態を保持するために張設状態保持部が設けられているので、線状伝達部材が固定端から上記一の箇所に至るまでの経路中で弛みを生じることはなく、上記のような第1および第2のヘッドの移動を確実に実行させることができる。ここで、張設状態保持部の具体例としては、例えば、第1のヘッドおよび第2のヘッドのそれぞれに、上記第1のプーリおよび第2のプーリとは異なるプーリをそれぞれ設けておき、これらを線状伝達部材で引っ張っておくという構成や、第1のヘッドおよび第2のヘッドをそれぞれスプリングなどの弾性部材で引っ張っておくというような構成を採用することができる。引っ張り方向は、駆動力発生源による第1のヘッドおよび第2のヘッドの各スライド方向とは反対側である。
【0014】
以上のように、本発明に係るチャック装置では、一の駆動源により複数のヘッドを移動させてワークをチャックすることができるとともに、対象となるワークの形状に関わらず、正確な位置決めをした状態でワークをチャックすることが可能である。
なお、本発明に係るチャック装置とは、対象ワークを把持する機構を有する装置であり、ロボットチャックのような装置の他、コンベヤ上で対象ワークを切り出しや位置決めを行うために一旦、対象ワークを把持するような装置も含む概念で用いている。
【発明を実施するための最良の形態】
【0015】
以下では、本発明を実施するための最良の形態について、図面を参酌しながら説明する。なお、以下の説明に係る実施の形態は、本発明の構成上の特徴および当該特徴的構成から奏される作用効果を分かりやすく説明するための一例として用いるものであって、本発明は、その技術的な本質的特徴部分を除き、以下の内容に何ら限定を受けるものではない。
[実施の形態1]
1.全体構成
本実施の形態に係るスライド型チャック装置(以下、単に「チャック装置」と記載する。)1の全体構成について、図1を用い説明する。
【0016】
図1に示すように、チャック装置1では、上層プレート11と下層プレート12との間に複数の支柱13が架設されている。チャック装置1では、上層プレート11と下層プレート12、および支柱13により、装置の基準となるベースが構成されている。上層プレート11におけるZ軸方向上側主面には、4つのスライドヘッド21〜24が配されている。4つのスライドヘッド21〜24は、それぞれ上層プレート11に固定された直線状のガイドレール31〜34にスライド自在に取り付けられている。
【0017】
上層プレート11には、ガイドレール31〜34の各々に沿って、長穴11a〜11dが開けられている。この長穴11a〜11dは、各スライドヘッド21〜24のアームの通過のために設けられている。各スライドヘッド21〜24の構成については、後述する。チャック装置1が把持しようとするワーク900は、上層プレート11の略中心であって、各ガイドレール31〜34の交差部分に載置され、4つのスライドヘッド21〜24により把持される。
【0018】
複数の支柱13の架設により設けられた上層プレート11と下層プレート12との間の空間には、駆動力発生源としてのモータが収納されている(図1では、図示を省略)。モータには、円筒状のドラム51がZ軸に対して直交する方向を中心軸として設けられ、その直上に振り分けローラ52が設けられている。
各支柱13には、上層プレート11の主面上に配された各スライドヘッド21〜24に対応して、プーリ41a,41b,44a,44b,・・・が回転自在に設けられ、また、支柱13と支柱13との間にも各スライドヘッド21〜24に対応して、プーリ41c,44c,・・・が回転自在に設けられている。なお、図1では、スライドヘッド22,23に対応するプーリについては図示を省略している。
【0019】
各プーリ41a〜41c,44a〜44c,・・・は、Z軸方向に2層構造を有する。
チャック装置1では、3本のワイヤ61,62,63が用いられている。ワイヤ61は、ドラム51に複数回巻回されており、振り分けローラ52を介して、一方がプーリ41a,41b側へと延伸され、他方がプーリ44b,44a側へと延伸されている。ワイヤ62は、プーリ41cに掛けられ、両端がX軸方向に延伸され、ワイヤ63は、プーリ44cに掛けられ、両端がY軸方向に延伸されている。ワイヤ62とワイヤ63とは、それぞれプーリ41cの下側部分とプーリ44cの上側部分に掛けられることにより、互いに接触しないようになっている。
【0020】
2.モータ53およびその周辺部の構成
チャック装置1の構成の内、モータ53およびその周辺部の構成について、図2を用い説明する。
図2に示すように、モータ53には、その回転軸に円筒状のドラム51が取り付けられている。そして、ドラム51の上方には、モータ53の回転軸と平行な軸を中心軸とする振り分けローラ52が設けられている。図示を省略しているが、振り分けローラ52は、下層プレート12に立設されたプレートなどに軸支されている。
【0021】
振り分けローラ52は、軸方向の中央部分が他の部分52b,52cよりも大径の鍔部分52aを有する。ドラム51の円周方向に複数回巻回されたワイヤ61は、一方が振り分けローラ52の部分52cに掛けられてプーリ41aの側へと延伸され、他方が振り分けローラ52の部分52bに掛けられてプーリ44bの側へと延伸されている。
チャック装置1では、モータ53の回転軸が一の方向rot.Aへと回転するとき、ワイヤ61におけるプーリ41aの側へと延伸する部分61aがドラム51の側へと引き戻され、プーリ44bへと延伸する部分61bが送り出される。
逆に、モータ53の回転軸が他の方向rot.Bへと回転するとき、ワイヤ61におけるプーリ41aの側へと延伸する部分61aが送り出され、プーリ44bへと延伸する部分61bがドラム51の側へと引き戻される。
【0022】
チャック装置1では、上述のように、モータ53の回転方向を制御することにより、ワイヤ61の送り出しと引き戻しを実行できる。
3.スライドヘッド21〜24の構成
スライドヘッド21〜24の構成について、図3および図4を用い説明する。図3(a)は、スライドヘッド21の正面図であり、図3(b)は、スライドヘッド21の側面図である。図4(a)は、スライドヘッド23の正面図であり、図4(b)は、スライドヘッド23の側面図である。
【0023】
先ず、図3(a)に示すように、スライドヘッド21は、ヘッド本体211と、そのZ軸方向下側に接合されたガイド212、ガイド212のY軸方向右側に接合されたアーム213とを有する。また、スライドヘッド21は、アーム213に対して回転自在に取り付けられたプーリ214およびZ軸方向下端213aに取り付けられたワイヤ止め金具215も有している。
【0024】
スライドヘッド21におけるガイド212には、ガイドレール31を受けるガイド溝212aが設けられている。また、プーリ214は、上部要素214aと下部要素214bとの2層構造を有し、クランク状に曲折加工されたアーム213の中程に回転自在に取り付けられている。
図3(b)に示すように、プーリ214には、上下に分けてワイヤ61が掛けられている。一方が延伸部分61aであり、他方が延伸部分61bである。また、アーム213の下端213aに取り付けられたワイヤ止め金具215には、X軸方向の両方向にワイヤ63が止められている。
【0025】
なお、スライドヘッド22については、図3(a)および図3(b)に示すスライドヘッド21と同様の構成を有するので、図示および説明を省略する。
次に、図4(a)に示すように、スライドヘッド23は、ヘッド本体231と、そのZ軸方向下側に接合されたガイド232、ガイド232のY軸方向右側に接合されたアーム233とを有する。スライドヘッド23では、上記スライドヘッド21,22と異なり、アーム233にはプーリが取り付けられておらず、Z軸方向下端233aにワイヤ止め金具235が取り付けられている。ガイド232におけるガイド溝232aについては、上記スライドヘッド21,22と同様である。
【0026】
図4(b)に示すように、スライドヘッド23におけるワイヤ止め金具235には、ワイヤ63が止められており、上記スライドヘッド21にワイヤ63を介して連結されている。
なお、スライドヘッド24については、スライドヘッド23と同様の構成を有するが、図1に示すように、ワイヤ62を介してスライドヘッド22と連結されている。
【0027】
4.スライドヘッド21〜24のスライド駆動
スライドヘッド21〜24のスライド駆動の形態について、図5および図6を用い説明する。
4−1.スライドヘッド21,22のスライド駆動
先ず、スライドヘッド21,22のスライド駆動について、図5を用い説明する。図5では、チャック装置1におけるスライドヘッド21,22と、ドラム51と、プーリ41a,41b,42a,42b,43a,43b,44a,44bおよびワイヤ61との配設関係と、スライドヘッド21,22のスライド駆動形態とを模式的に示す。
【0028】
図5に示すように、ワイヤ61におけるドラム51からの一方の延伸部分61aは、プーリ41a、プーリ214、プーリ41b、プーリ42a、プーリ224、プーリ42bの順に経由して、ベースの一部である上層プレート11(図1を参照。)の下面に固定されたワイヤ止め金具71に端部が止められている。
一方、ワイヤ61におけるドラム51からのもう一方の延伸部分61bは、プーリ44b、プーリ224、プーリ44a、プーリ43b、プーリ214、プーリ43aの順に経由して、ベースの一部である上層プレート11(図1を参照。)の下面に固定されたワイヤ止め金具72に端部が止められている。
【0029】
図5の二点鎖線で囲んだ部分に示すように、スライドヘッド22におけるプーリ224は上下2層構造を有しており、プーリ42a,42bを介して張設されたワイヤ61の延伸部分61aは、上層224aに掛けられ、プーリ44b,44aを介して張設されたワイヤ61の延伸部分61bは、下層224bに掛けられている。よって、ワイヤ61における延伸部分61aと延伸部分61bとが、スライドヘッド22におけるプーリ224で接触することはない。なお、スライドヘッド21においても同様の構成を採用しており、ワイヤ61における延伸部分61aと延伸部分61bとが接触することはない。
【0030】
チャック装置1では、モータ53に取り付けられたドラム51が一方向rot.Aに回転する場合、ドラム51からの延伸部分61aはドラム51の側へと引き戻され、延伸部分61bは送り出されることになる。他方、ドラム51が他の方向rot.Bに回転する場合、ドラム51からの延伸部分61aは送り出されることになり、延伸部分61bはドラム51の側へと引き戻されることになる。
【0031】
図5に示すように、チャック装置1におけるプーリ214,224は、ワイヤ61およびプーリ41a,41b,42a,42b,43a,43b,44a,44b、さらにはドラム51および固定端(ワイヤ止め金具71,72で止められた端部)との関係で、動滑車として機能し、スライドヘッド21,22が、それぞれX軸方向およびY軸方向にスライド駆動する。
【0032】
例えば、ドラム51が方向rot.Aに回転する場合には、スライドヘッド21がX軸方向上向きにスライド駆動し、スライドヘッド22がY軸方向右向きにスライド駆動する。即ち、ドラム51が方向rot.Aに回転する場合には、図1に示す上層プレート11の中央部分から各スライドヘッド21,22が後退するようにスライド駆動する。ここで、ドラム51が方向rot.Aに回転する場合におけるスライドヘッド21とスライドヘッド22とのスライド駆動の開始順序は、ワイヤ61の延伸方向61aに沿って、ワイヤ61における引き戻される延伸部分61aの固定端(ワイヤ止め金具71で止められた端部)に近い側のプーリ224を有するスライドヘッド22が先にスライド駆動を開始する。そして、スライドヘッド22がストッパ(図示を省略。)などに当接するなどしてスライドが停止された後、スライドヘッド21がスライド駆動を開始する。
【0033】
ドラム51が方向rot.Bに回転する場合には、先ず、スライドヘッド21がX軸方向下向きにスライド駆動し、スライドヘッド21がワーク900(図1を参照。)に当接した後に、スライドヘッド22がスライド駆動を開始する。ここで、スライドヘッド21がワーク900に当接した後に、スライドヘッド22がスライド駆動を開始した場合においても、ワーク900はスライドヘッド21,23により強い力で押圧(挟持作用)を受けているのではなく、スライドヘッド22,24のスライド駆動が終了するまではワーク900が多少動き得る状態にある。このため、チャック装置1では、ワーク900を正確に位置決めすることが可能である。
【0034】
4−2.スライドヘッド23,24のスライド駆動
スライドヘッド23,24のスライド駆動の形態について、図6を用い説明する。図6では、チャック装置1におけるスライドヘッド23,24およびプーリ41c,42c,43c,44cの配設関係と、スライドヘッド23,24のスライド駆動形態とを模式的に示す。
【0035】
図6に示すように、スライドヘッド21,23のスライド駆動範囲よりも、X軸方向のさらに外側にプーリ41c,43cが設けられている。同様に、スライドヘッド22,24のスライド駆動範囲よりも、Y軸方向のさらに外側にプーリ42c,44cが設けられている。プーリ41c,42c,43c,44cは、ベースの一部を構成する支柱13の高さ方向中程に取り付けられている。
【0036】
プーリ41cとプーリ43cとを周回する状態に環状のワイヤ62が張設されており、同様に、プーリ42cとプーリ44cとを周回する状態に環状のワイヤ63が張設されている。ワイヤ62では、ワイヤ止め金具215によりスライドヘッド21に取り付けられており、ワイヤ止め金具235によりスライドヘッド23に取り付けられている。同様に、ワイヤ63では、ワイヤ止め金具225によりスライドヘッド22に取り付けられており、ワイヤ止め金具245によりスライドヘッド24に取り付けられている。
【0037】
スライドヘッド21とスライドヘッド23とは、上層プレート11(図1を参照。)の中央部分に対して対象になるように、ワイヤ62に対し取り付けられており、スライドヘッド22とスライドヘッド24についても同様の関係でワイヤ63に取り付けられている。
図6に示すように、スライドヘッド22とスライドヘッド24とは、スライドヘッド21およびスライドヘッド22に対して、定滑車の原理に基づき従動することになる。
【0038】
例えば、スライドヘッド21がX軸方向下向きにスライド駆動する場合には、同一の変位でスライドヘッド23がX軸方向上向きにスライド駆動する。同様に、スライドヘッド22がY軸方向左向きにスライド駆動する場合には、同一の変位でスライドヘッド24がY軸方向右向きにスライド駆動する。
以上のようにして、チャック装置1では、モータ53の回転駆動に伴い、4つのスライドヘッド21〜24がスライド駆動し、ワーク900のチャック(把持)またはリリース(解放)が実行される。
【0039】
4−3.モータ53の制御
本実施の形態に係るチャック装置1では、モータ53として、ホールセンサを備える電動モータを採用しており、モータ53に対してPWM制御方式を以って電力供給を実行する。なお、モータ53の駆動制御を行う制御部については、一般的な制御回路を備える部分であり、図示および詳細な説明を省略する。
【0040】
チャック装置1では、ワーク900を4つのスライドヘッド21〜24で把持した状態において、モータ53が一定の時間、回転せず、ホールセンサからの信号が予め設定された時間を超えて検知されない場合には、制御部は、モータ53に対し供給する電力のパルス幅を、それよりも前に比べて狭くしてワーク900の把持状態を維持する。
なお、上記予め設定の時間については、モータ53の大きさやチャック装置1に求められるチャック速度などにより規定されるものである。また、本持実施の形態では、ホールセンサからの信号が予め設定された時間を超えて検知されない場合に供給電力のパルス幅を狭くすることとしたが、逆に広くすることも可能である。この場合には、ワーク900を把持する力を増大させることができる。
【0041】
5.チャック装置1が有する優位性
本実施の形態に係るチャック装置1では、一のモータ53により、4つのスライドヘッド21〜24を連動してスライド駆動させることができる。このため、チャック装置1では、スライドヘッドごとに空圧シリンダやモータなどの駆動力発生源を設ける場合に比べて、装置のコストを低減することができる。
【0042】
また、チャック装置1では、一のモータ53により4つのスライドヘッド21〜24を連動させてスライド駆動させることができるので、上記特許文献1〜2で提案されているチャック装置のようにスライドヘッド毎に駆動力発生源を設ける場合に比べて、スライドヘッド21〜24間での駆動タイミングや駆動力の調整といった煩雑な作業を必要としない。
【0043】
また、チャック装置1では、スライドヘッド21に取り付けられたプーリ214と、スライドヘッド22に取り付けられたプーリ224とが、ワイヤ61などとの関係により動滑車として機能するので、スライドヘッド21とスライドヘッド22のうちワイヤ61の引き戻し側の固定端に近い側にプーリが配されている側のスライドヘッドからスライド駆動が開始されることになる。そして、先にスライド駆動を開始したスライドヘッド(スライドヘッド21またはスライドヘッド22)がワーク900に当接した時点から、もう一方のスライドヘッドがスライド駆動を開始することになる。なお、後にスライド駆動を開始した側のスライドヘッドがスライド駆動している途中においては、先にワーク900に当接したスライドヘッドとこれに従動するスライドヘッドは、ワーク900を強く挟持するものではなく、ワーク900が多少移動することを許容する。このため、後からスライド駆動を開始したスライドヘッドがワーク900に当接するまでの間では、ワーク900は多少移動することができ、チャック完了の際の正確な位置決めができる。
【0044】
また、チャック装置1では、4つのスライドヘッド21〜24の内、スライドヘッド21,22が上記のようにスライド駆動し、これにスライドヘッド23,24が従動するので、ワーク900のサイズや形状が多少変化しても、スライドヘッド21〜24などの交換を必要とすることなくチャック動作が可能である。
なお、スライドヘッド21,22をそれぞれスプリングなどの弾性部材により、ワイヤ61が掛けられている方向とは反対向きに引っ張る構成を採用することでも、ワイヤ61の張設状態を保持することが可能である。
【0045】
以上のように、本実施の形態に係るチャック装置1では、一のモータ53により4つのスライドヘッド21〜24をスライド駆動させてワーク900をチャックすることができるとともに、ワーク900の形状やサイズが多少変化しても、正確に位置決めされた状態でワーク900をチャックすることが可能である。
[実施の形態2]
実施の形態2に係るスライド型チャック装置(以下では、単に「チャック装置」と記載する。)2について、図7を用い説明する。
【0046】
図7に示すように、チャック装置2では、ベースプレート16におけるZ軸方向上面に、2つの固定ブロック17,18が固定されている。2つの固定ブロック17,18は、ともにアングル状をしており、固定ブロック17はX軸方向に延設され、固定ブロック18はY軸方向に延設されている。
一方、チャック装置2では、ベースプレート16に対して、X軸方向またはY軸方向にスライド駆動する2つのスライドヘッド26,27が設けられている。なお、スライドヘッド26.27は、上記実施の形態1に係るチャック装置1のスライドヘッド21,22などと同様に、ガイドレールに取り付けられて、スライド自在となっているのであるが、チャック装置2では、ガイドレールはベースプレート16におけるZ軸方向下面(裏面)に設けられている。なお、スライドヘッド26,27は、ベースプレート16に設けられた長穴16a,16bをそれぞれ介して、スライド機構部分に接合されている。
【0047】
スライドヘッド26,27におけるスライド駆動に係る構成は、上記実施の形態1に係るチャック装置1におけるスライドヘッド21,22と同様であり、図5に示すのと同様の形態を備える。
本実施の形態に係るチャック装置2は、例えば、搬送用パレットなどを対象ワークとするものであって、ベースプレート16上において、2つのスライドヘッド26,27のスライド駆動により、対象ワークである搬送用パレットが2つの固定ブロック17,18に当接するように追い込まれて行き、2つの固定ブロック17,18と2つのスライドヘッド26,27により位置決めされ、把持される。
【0048】
本実施の形態に係るチャック装置2では、スライドヘッド26,27のスライド駆動のためのガイドレールをベースプレート16の裏側に設置しているので、搬送用パレットがスライドヘッド26,27により移動される際に、ワークである搬送用パレットがガイドレールに引っ掛ることがない。
実施の形態2に係るチャック装置2も、上記実施の形態1に係るチャック装置1と基本的に同一構成を有するので、上記同様の優位性を有する。
[実施の形態3]
1.全体構成
実施の形態3に係るスライド型チャック装置(以下では、単に「チャック装置」と記載する。)3の全体構成について、図8を用い説明する。
【0049】
図8に示すように、本実施の形態に係るチャック装置3は、ベース(図示を省略。)に対して、1つの固定ブロック73と、7つのスライドヘッド81〜87を備える。そして、チャック装置3がチャック対象としているワーク901は、X軸方向に長軸の形状をしており、X軸方向における箇所に応じて、Y軸方向の幅が異なる複数の部分が一体に形成されてなる。
【0050】
固定ブロック73は、上記実施の形態2に係るチャック装置2の固定ブロック17,18などと同様に、アングル状をしており、ベースに固定されている。
7つのスライドヘッド81〜87の内、6つのスライドヘッド81〜86は、Y軸方向にスライド駆動できるようになっており、残りの1つのスライドヘッド87は、X軸方向にスライド駆動できるようになっている。スライドヘッド81〜83は、対向するスライドヘッド84〜86とでワーク901をY軸方向に挟持し、スライドヘッド87は、対向して設けられた固定ブロック73とでワーク901をX軸方向に挟持できる。
【0051】
2.スライドヘッド81〜83,87のスライド駆動
チャック装置3におけるスライドヘッド81〜83,87のスライド駆動の形態について、図9を用い説明する。
図9に示すように、チャック装置3では、上記実施の形態1に係るチャック装置1と同様に、モータの回転軸に取り付けられたドラム91にワイヤ111が一巻き以上巻回されている。ワイヤ111は、ドラム91から2方向に延伸されている(延伸部分111aおよび延伸部分111b)。
【0052】
ワイヤ111における一方の延伸部分111aは、ドラム91の側から順に、プーリ101a、プーリ814、プーリ101b、プーリ102a、プーリ824、プーリ102b、プーリ103a、プーリ834、プーリ103b、プーリ107a、プーリ874、プーリ107bを経由してワイヤ止め金具122によりベースに端部が固定されている。
ワイヤ111におけるもう一方の延伸部分111bは、ドラム91の側から順に、プーリ104a、プーリ814、プーリ104b、プーリ105a、プーリ824、プーリ105b、プーリ106a、プーリ834、プーリ106b、プーリ108b、プーリ874、プーリ108aを経由してワイヤ止め金具121によりベースに端部が固定されている。
【0053】
図9の二点鎖線で囲んだ部分に示すように、チャック装置3においても、各スライドヘッド81〜87に設けられたプーリ814〜874は、それぞれ二層構造(例えば、プーリ834の場合、上層834aと下層834bとを有する。)になっており、ワイヤ111における延伸部分111aと延伸部分111bとが接触しないようになっている。
図9に示すように、チャック装置3においても、ドラム91の回転(方向rot.C、方向rot.D)に応じて、動滑車の原理により、スライドヘッド81〜83,87のスライド駆動が実行される。スライドヘッド81〜83,87は、同時にスライド駆動を開始するのではなく、上記実施の形態1で説明したように、引き戻し側における固定端に近いスライドヘッドからスライド駆動を開始する。
【0054】
3.スライドヘッド84〜86のスライド駆動
スライドヘッド84〜86のスライド駆動の形態について、図10を用い説明する。
図10に示すように、本実施の形態に係るチャック装置3においても、スライドヘッド84〜86は、スライドヘッド81〜83に従動する。即ち、チャック装置3におけるベースには、スライドヘッド81およびスライドヘッド84に対応してプーリ101c,104cが設けられ、スライドヘッド82およびスライドヘッド85に対応してプーリ102c,105cが設けられ、スライドヘッド83およびスライドヘッド86に対応してプーリ103c,106cが設けられている。
【0055】
上記実施の形態1に係るチャック装置1と同様に、環状のワイヤ112がプーリ101cとプーリ104cに掛けられ、環状のワイヤ113がプーリ102cとプーリ105cに掛けられ、環状のワイヤ114がプーリ103cとプーリ106cに掛けられている。そして、スライドヘッド81,84は、それぞれワイヤ112に対してワイヤ止め金具815,845により取り付けられている。同様に、スライドヘッド82,85は、それぞれワイヤ113に対してワイヤ止め具825,855により取り付けられ、スライドヘッド83,86は、それぞれワイヤ114に対してワイヤ止め金具835,865により取り付けられている。
【0056】
図10に示す構成により、チャック装置3でも、スライドヘッド84〜86は、それぞれスライドヘッド81〜83に従ってスライド駆動する。
以上のような構成を採用することにより、本実施の形態に係るチャック装置3では、図8に示すようなチャックしようとする側面に凹凸を有するようなワーク901に対しても、正確に位置決めした状態で把持することが可能となる。
【0057】
なお、本実施の形態に係るチャック装置3においても、スライドヘッド81〜87のスライド駆動に係る基本構成は上記実施の形態1,2に係るチャック装置1,2と同様であるので、上記優位性をそのまま有する。
[変形例]
変形例に係るスライド型チャック装置の構成について、図11を用い説明する。図11では、本変形例に係るスライド型チャック装置で最も特徴を有する駆動力発生源について、図示している。
【0058】
図11に示すように、本変形例に係るスライド型チャック装置では、駆動力発生源として直動タイプの空圧シリンダ133を備える。空圧シリンダ133のロッド133aには可動プレート131が取り付けられており、可動プレート131には、二本のワイヤ141,142が接合されている。
二本のワイヤ141,142の内のワイヤ141は、可動プレート131におけるX軸方向左手前側の主面131aに接合されており、プーリ151a,151b,151cなどを経由して延伸されている。
【0059】
一方、もう一本のワイヤ142は、可動プレート131におけるX軸方向右奥側の主面131bに接合されており、プーリ152a,152b,152cなどを経由して延伸されている。
本変形例に係るスライド型チャック装置では、給排気ポート133bから空気の出し入れを行うことにより、空圧シリンダ133のロッド133aを方向E,Fの方向に往復させることができる。そして、可動プレート131の往復に伴い、ワイヤ141,142の送り出し、引き戻し(方向G〜J)がなされる。
【0060】
本変形例に係るスライド型チャック装置では、直動タイプの空圧シリンダ133を駆動力発生源として採用し、上記実施の形態1〜3に係るスライド型チャック装置1〜3と同様のチャック動作を行うことができる。そして、本変形例に係るスライド型チャック装置においても、駆動力発生源が異なるだけであって、上記実施の形態1〜3に係るスライド型チャック装置1〜3と同様の優位性を有する。
[実施の形態4]
1.全体構成
実施の形態4に係る搖動型チャック装置4の構成について、図12を用い説明する。図12は、搖動型チャック装置4の構成を示す模式断面図である。
【0061】
図12に示すように、筐体14の内方に、搖動ヘッド161、スライドヘッド162、およびエアシリンダ183が収納されている。この内、搖動ヘッド161は、略L字状をしており、その一端部分の一点を支点(搖動中心161a)として搖動自在となっている。一方、スライドヘッド162は、上記実施の形態1に係るスライド型チャック装置1などと同様に、ガイドレール(不図示)に取り付けられており、Y軸方向に沿ってスライド自在となっている。なお、搖動ヘッド161の搖動範囲は、ストッパ185aとストッパ185bとで規定され、スライドヘッド162のスライド範囲は、ストッパ186aおよびストッパ186bにより規定される。ここで、スライドヘッド162には、鍔状部分162aが設けられており、スライドヘッド162がY軸方向上限に位置する場合に、鍔状部分162aがストッパ186bに当接することになる。
【0062】
搖動ヘッド161およびスライドヘッド162の各々には、プーリ1614,1624が取り付けられている。プーリ1614は、二点鎖線で囲んだ部分に示すように、要素1614aと要素1614bとの2層構造を有している。なお、図示はしていないが、スライドヘッド162におけるプール1624についても、同様に2層構造を有している。
筐体14には、Y軸方向上側の壁に、二箇所の開口14a、14bが設けられている。開口14aは、搖動ヘッド161が搖動した際に、筐体14に接触することがないように設けられており、開口14bは、スライドヘッド162がY軸方向上向きにスライド駆動した際に、筐体14に接触することがないように設けられている。
【0063】
エアシリンダ183には、ロッド183aの先端に可動プレート181が取り付けられている。可動プレート181の一方の主面181aには、ワーや171の一端が取り付けられており、他方の主面181bには、ワイヤ172の一端が取り付けられている。可動プレート181は、エアシリンダ183に対し、その給排気ポート183bから空気の出し入れを行うことにより、X軸方向の左右に駆動する。
【0064】
可動プレート181の主面181aに一端が取り付けられたワイヤ171は、プーリ175a、プーリ175b、プーリ175c、プーリ1624、プーリ175d、およびプーリ1614を経由して、ワイヤ止め金具165により筐体14に他端が固定されている。一方、可動プレート181の主面181bに一端が取り付けられたワイヤ172は、プーリ176a、プーリ176b、プーリ176c、プーリ176d、プーリ1624、プーリ176e、およびプーリ1614を経由して、ワイヤ止め金具166により筐体14に他端が固定されている。
【0065】
プーリ175a〜175d、およびプーリ176a〜176eは、筐体14に対して中心軸が回転自在に取り付けられている。
2.搖動ヘッド161およびスライドヘッド162の駆動
搖動型チャック装置4の駆動形態について、図12と図13とを用い説明する。
本実施の形態に係る搖動型チャック装置4では、図12に示す状態から、エアシリンダ183を駆動させて可動プレート181をX軸方向左側に向けて移動させる。これに伴い、ワイヤ171は引き戻され、ワイヤ172は送り出されることになる。なお、ワイヤ171およびワイヤ172は、ともに共通の可動プレート181に一端が取り付けられているので、同一の変位となる。
【0066】
図13に示すように、ワイヤ171の引き戻しと、ワイヤ172の送り出しにより、まずワイヤ171の固定端であるワイヤ止め金具165に近い搖動ヘッド161が搖動し始める。そして、搖動ヘッド161の搖動が終わると、次にスライドヘッド162のスライドが始まる。これは、上述のように、搖動ヘッド161およびスライドヘッド162に取り付けられているプーリ1614,1624が動滑車として機能するためである。
【0067】
搖動型チャック装置4では、搖動ヘッド161とスライドヘッド162とにより、ワークのチャックや位置決め、あるいは切り出しなどを実行できる。
[その他の事項]
実施の形態1〜3では、駆動力発生源の一例として電動モータ53を採用し、変形例および実施の形態4では、空圧シリンダ133,183を採用したが、本発明は、これに限らず油圧シリンダや、ボールネジなどのネジ類が連結されたモータ、さらには空圧式または油圧式ロータリーアクチュエーターなどを採用することもできる。
【0068】
また、上記実施の形態1〜4および変形例では、線状伝達部材の一例としてワイヤ61,62,63,111,112,113,114,141,142,171,172を採用したが、チェーンやロープやベルトなどを採用することも勿論できる。なお、チェーンを用いる場合に比べて、ワイヤやベルトを用いる場合には、装置設計に係る自由度の高さ、装置サイズおよび重量、コストなどの観点から優位である。
【0069】
また、上記実施の形態1〜3に係るスライド型チャック装置1〜3および実施の形態4に係る搖動型チャック装置4では、1つのスライドヘッドあるいは搖動ヘッドに対して2方向からワイヤを掛けることとしたが、一方のワイヤを省略し、その代わりにスプリングなどの弾性体を用いて、スライドヘッドのプーリに掛けられたワイヤの張設状態を保持し、スライドヘッドを原点復帰させるという構成を採用することもできる。
【0070】
また、上記実施の形態4では、一つの搖動ヘッド161と一つのスライドヘッド162とを備える搖動型チャック装置4を一例としたが、搖動ヘッドの数などについては、これに限定を受けるものではない。例えば、二つ、あるいはそれ以上の搖動ヘッドを有し、それら搖動ヘッドの搖動によりワークをチャックする形態を採用することもできる。
【産業上の利用可能性】
【0071】
本発明は、ワークのサイズおよび形状に多少の変化がある場合にも、正確な位置決めを行いながらワークをチャックすることができるチャック装置を実現するのに有用である。
【図面の簡単な説明】
【0072】
【図1】実施の形態1に係るスライド型チャック装置1の全体構成を示す模式斜視図である。
【図2】スライド型チャック装置1の構成要素の内のモータ53と、その周辺部の構成を示す模式斜視図である。
【図3】スライド型チャック装置1の構成要素の内のスライドヘッド21の構成を示す模式側面図である。
【図4】スライド型チャック装置1の構成要素の内のスライドヘッド23の構成を示す模式側面図である。
【図5】スライド型チャック装置1におけるスライドヘッド21,22のスライド駆動の形態を示す模式平面図である。
【図6】スライド型チャック装置1におけるスライドヘッド23,24のスライド駆動の形態を示す模式平面図である。
【図7】実施の形態2に係るスライド型チャック装置2の全体構成を示す模式斜視図である。
【図8】実施の形態3に係るスライド型チャック装置3の全体構成を示す模式平面図である。
【図9】スライド型チャック装置3におけるスライドヘッド81,82,83,87のスライド駆動の形態を示す模式平面図である。
【図10】スライド型チャック装置3におけるスライドヘッド84,85,86のスライド駆動の形態を示す模式平面図である。
【図11】変形例に係るスライド型チャック装置の駆動源としてのエアシリンダ133と、その周辺の要素とを示す模式斜視図である。
【図12】実施の形態4に係る搖動型チャック装置4の主要構成を示す模式断面図である。
【図13】搖動式チャック装置4の駆動形態を示す模式断面図である。
【符号の説明】
【0073】
1,2,3.スライド型チャック装置
4.搖動型チャック装置
11.上層プレート
12.下層プレート
13.支柱
14.筐体
16.ベースプレート
17,18,73.固定ブロック
21,22,23,24,26,27,81,82,83,84,85,86,87,162.スライドヘッド
31,32,33,34.ガイドレール
41a,41b,41c,42a,42b,42c,43a,43b,43c,44a,44b,44c,101a,101b,101c,102a,102b,102c,103a,103b,103c,104a,104b,104c,105a,105b,105c,106a,106b,106c,107a,107b,151a,151b,151c,152a,152b,152c,175a,175b,175c,175d,176a,176b,176c,176d,176e,214,224,814,824,834,874,1614,1624.プーリ
51,91.ドラム
52.振り分けローラ
61,62,63,111,112,113,114,141,142,171,172.ワイヤ
71,72,121,122,165,166,215,225,235,245,815,825,835,845,855,865.ワイヤ止め金具
131,181.可動プレート
133,183.エアシリンダ
161.搖動ヘッド
185a,185b,186a,186b.ストッパ
211,231.ヘッド本体
212,232.ガイド
213,233.アーム
900,901.ワーク
【特許請求の範囲】
【請求項1】
複数のヘッドにより対象ワークをチャックするチャック装置において、
基準となるベースと、
前記複数のヘッドに含まれ、前記ベースに対してそれぞれ移動自在に取り付けられた第1および第2のヘッドと、
前記第1のヘッドに取り付けられた第1のプーリと、
前記第2のヘッドに取り付けられた第2のプーリと、
屈曲自在性を有し、一端が前記ベースに固定され、当該一端から順に前記第1のプーリおよび前記第2のプーリを経由して張設された線状伝達部材と、
前記ベースに取り付けられ、前記線状伝達部材における前記第1のプーリおよび第2のプーリに掛けられた箇所を挟んで前記一端とは反対側の一の箇所を、送り出しまたは引き戻しを実行する駆動力発生源と、
前記線状伝達部材に対して、前記一端から前記一の箇所までの張設状態を保持する張設状態保持部と
を備え、
前記駆動力発生源からの駆動力は、前記線状伝達部材を介して前記第1および第2のプーリへと伝達され、当該第1および第2のプーリのそれぞれが動滑車として機能することにより、前記第1および第2のヘッドのそれぞれが前記対象ワークに向け移動する
ことを特徴とするチャック装置。
【請求項2】
前記ベースには、前記第1のプーリに対応し、且つ、前記第1のヘッドの移動における一方の範囲外に、第3および第4のプーリが設けられ、前記第2のプーリに対応し、且つ、前記第2のヘッドの移動における一方の範囲外に、第5および第6のプーリが設けられており、
前記線状伝達部材は、前記一端から順に、前記第3のプーリ、前記第1のプーリ、前記第4のプーリ、第5のプーリ、第2のプーリ、第6のプーリを経由して、前記駆動力発生源に取り付けられている
ことを特徴とする請求項1に記載のチャック装置。
【請求項3】
前記駆動力発生源は、回転型電動モータであって、その回転軸に円形断面の外周面を有するドラムを備え、
前記線状伝達部材は、前記駆動力発生源におけるドラムの外周面に巻回されている
ことを特徴とする請求項2に記載のチャック装置。
【請求項4】
前記第1のヘッドには、第7のプーリが取り付けられており、
前記第2のヘッドには、第8のプーリが取り付けられており、
前記ベースには、前記第7のプーリに対応し、且つ、前記第1のヘッドの移動における他方の範囲外に、第9および第10のプーリが設けられ、前記第8のプーリに対応し、且つ、前記第2のヘッドの移動における他方の範囲外に、第11および第12のプーリが設けられており、
前記線状伝達部材は、他端が前記ドラムから周方向に延伸され、前記第11のプーリ、前記第8のプーリ、前記第12のプーリ、前記第9のプーリ、前記第7のプーリ、前記第10のプーリを経由して、前記ベースに固定されており、
前記第7のプーリから前記第12のプーリまでの6つのプーリと、これらを経由して張設された前記線状伝達部材により、前記張設状態保持部が構成されている
ことを特徴とする請求項3に記載のチャック装置。
【請求項5】
前記回転型電動モータに対して、PWM制御方式を以って電力供給を行う制御部が設けられており、
前記制御部は、前記回転型電動モータの回転停止時間が予め設定された時間を超えたことを検出する停止検出手段を有し、当該停止検出手段により回転停止時間が予め設定された時間を超えたことを検出した場合に、前記回転型電動モータへの供給電力のパルス幅を、検出前に対し変化させる
ことを特徴とする請求項3または4に記載のチャック装置。
【請求項6】
前記回転型電動モータには、ホールセンサが備えられており、
前記制御部は、前記ホールセンサによるロータの位置検出が予め設定された時間を超えて検出されないことを判断し、当該判断に基づいて前記供給電力のパルス幅の変更を実行する
ことを特徴とする請求項5に記載のチャック装置。
【請求項7】
前記ベースには、前記第1のヘッドと同一軸上を移動自在の第3のヘッドと、前記第2のヘッドと同一軸上を移動自在の第4のヘッドとが取り付けられており、
前記第3のヘッドは、前記第1のヘッドの移動に対し、反対方向に同一の移動量を以って移動し、
前記第4のヘッドは、前記第2のヘッドの移動に対し、反対方向に同一の移動量を以って移動する
ことを特徴とする請求項1から6の何れかに記載のチャック装置。
【請求項8】
前記ベースには、前記第1および第3のヘッドの移動軸上の、前記第3のヘッドに対して前記第1のヘッドを挟んだ反対側に第13のプーリが取り付けられ、前記第2および第3のヘッドの移動軸上の、前記第4のヘッドに対して前記第2のヘッドを挟んだ反対側に第14のプーリが取り付けられており、
屈曲自在性を有し、前記第13のプーリを経由し、一端が前記第1のヘッドに固定され、且つ、他端が前記第3のヘッドに固定された状態で第2の線状伝達部材が張設されており、
屈曲自在性を有し、前記第14のプーリを経由し、一端が前記第2のヘッドに固定され、且つ、他端が前記第4のヘッドに固定された状態で第3の線状伝達部材が張設されている
ことを特徴とする請求項7に記載のチャック装置。
【請求項9】
前記ベースには、前記第1および第3のヘッドの移動軸上の、前記第1のヘッドに対して前記第3のヘッドを挟んだ反対側に第15のプーリが取り付けられ、前記第2および第3のヘッドの移動軸上の、前記第2のヘッドに対して前記第4のヘッドを挟んだ反対側に第16のプーリが取り付けられており、
屈曲自在性を有し、前記第15のプーリを経由し、一端が前記第1のヘッドに固定され、他端が前記第3のヘッドに固定された状態で第4の線状伝達部材が張設され、
屈曲自在性を有し、前記第16のプーリを経由し、一端が前記第2のヘッドに固定され、他端が前記第4のヘッドに固定された状態で第5の線状伝達部材が張設されている
ことを特徴とする請求項8に記載のチャック装置。
【請求項1】
複数のヘッドにより対象ワークをチャックするチャック装置において、
基準となるベースと、
前記複数のヘッドに含まれ、前記ベースに対してそれぞれ移動自在に取り付けられた第1および第2のヘッドと、
前記第1のヘッドに取り付けられた第1のプーリと、
前記第2のヘッドに取り付けられた第2のプーリと、
屈曲自在性を有し、一端が前記ベースに固定され、当該一端から順に前記第1のプーリおよび前記第2のプーリを経由して張設された線状伝達部材と、
前記ベースに取り付けられ、前記線状伝達部材における前記第1のプーリおよび第2のプーリに掛けられた箇所を挟んで前記一端とは反対側の一の箇所を、送り出しまたは引き戻しを実行する駆動力発生源と、
前記線状伝達部材に対して、前記一端から前記一の箇所までの張設状態を保持する張設状態保持部と
を備え、
前記駆動力発生源からの駆動力は、前記線状伝達部材を介して前記第1および第2のプーリへと伝達され、当該第1および第2のプーリのそれぞれが動滑車として機能することにより、前記第1および第2のヘッドのそれぞれが前記対象ワークに向け移動する
ことを特徴とするチャック装置。
【請求項2】
前記ベースには、前記第1のプーリに対応し、且つ、前記第1のヘッドの移動における一方の範囲外に、第3および第4のプーリが設けられ、前記第2のプーリに対応し、且つ、前記第2のヘッドの移動における一方の範囲外に、第5および第6のプーリが設けられており、
前記線状伝達部材は、前記一端から順に、前記第3のプーリ、前記第1のプーリ、前記第4のプーリ、第5のプーリ、第2のプーリ、第6のプーリを経由して、前記駆動力発生源に取り付けられている
ことを特徴とする請求項1に記載のチャック装置。
【請求項3】
前記駆動力発生源は、回転型電動モータであって、その回転軸に円形断面の外周面を有するドラムを備え、
前記線状伝達部材は、前記駆動力発生源におけるドラムの外周面に巻回されている
ことを特徴とする請求項2に記載のチャック装置。
【請求項4】
前記第1のヘッドには、第7のプーリが取り付けられており、
前記第2のヘッドには、第8のプーリが取り付けられており、
前記ベースには、前記第7のプーリに対応し、且つ、前記第1のヘッドの移動における他方の範囲外に、第9および第10のプーリが設けられ、前記第8のプーリに対応し、且つ、前記第2のヘッドの移動における他方の範囲外に、第11および第12のプーリが設けられており、
前記線状伝達部材は、他端が前記ドラムから周方向に延伸され、前記第11のプーリ、前記第8のプーリ、前記第12のプーリ、前記第9のプーリ、前記第7のプーリ、前記第10のプーリを経由して、前記ベースに固定されており、
前記第7のプーリから前記第12のプーリまでの6つのプーリと、これらを経由して張設された前記線状伝達部材により、前記張設状態保持部が構成されている
ことを特徴とする請求項3に記載のチャック装置。
【請求項5】
前記回転型電動モータに対して、PWM制御方式を以って電力供給を行う制御部が設けられており、
前記制御部は、前記回転型電動モータの回転停止時間が予め設定された時間を超えたことを検出する停止検出手段を有し、当該停止検出手段により回転停止時間が予め設定された時間を超えたことを検出した場合に、前記回転型電動モータへの供給電力のパルス幅を、検出前に対し変化させる
ことを特徴とする請求項3または4に記載のチャック装置。
【請求項6】
前記回転型電動モータには、ホールセンサが備えられており、
前記制御部は、前記ホールセンサによるロータの位置検出が予め設定された時間を超えて検出されないことを判断し、当該判断に基づいて前記供給電力のパルス幅の変更を実行する
ことを特徴とする請求項5に記載のチャック装置。
【請求項7】
前記ベースには、前記第1のヘッドと同一軸上を移動自在の第3のヘッドと、前記第2のヘッドと同一軸上を移動自在の第4のヘッドとが取り付けられており、
前記第3のヘッドは、前記第1のヘッドの移動に対し、反対方向に同一の移動量を以って移動し、
前記第4のヘッドは、前記第2のヘッドの移動に対し、反対方向に同一の移動量を以って移動する
ことを特徴とする請求項1から6の何れかに記載のチャック装置。
【請求項8】
前記ベースには、前記第1および第3のヘッドの移動軸上の、前記第3のヘッドに対して前記第1のヘッドを挟んだ反対側に第13のプーリが取り付けられ、前記第2および第3のヘッドの移動軸上の、前記第4のヘッドに対して前記第2のヘッドを挟んだ反対側に第14のプーリが取り付けられており、
屈曲自在性を有し、前記第13のプーリを経由し、一端が前記第1のヘッドに固定され、且つ、他端が前記第3のヘッドに固定された状態で第2の線状伝達部材が張設されており、
屈曲自在性を有し、前記第14のプーリを経由し、一端が前記第2のヘッドに固定され、且つ、他端が前記第4のヘッドに固定された状態で第3の線状伝達部材が張設されている
ことを特徴とする請求項7に記載のチャック装置。
【請求項9】
前記ベースには、前記第1および第3のヘッドの移動軸上の、前記第1のヘッドに対して前記第3のヘッドを挟んだ反対側に第15のプーリが取り付けられ、前記第2および第3のヘッドの移動軸上の、前記第2のヘッドに対して前記第4のヘッドを挟んだ反対側に第16のプーリが取り付けられており、
屈曲自在性を有し、前記第15のプーリを経由し、一端が前記第1のヘッドに固定され、他端が前記第3のヘッドに固定された状態で第4の線状伝達部材が張設され、
屈曲自在性を有し、前記第16のプーリを経由し、一端が前記第2のヘッドに固定され、他端が前記第4のヘッドに固定された状態で第5の線状伝達部材が張設されている
ことを特徴とする請求項8に記載のチャック装置。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−82783(P2010−82783A)
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願番号】特願2008−257256(P2008−257256)
【出願日】平成20年10月2日(2008.10.2)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願日】平成20年10月2日(2008.10.2)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
[ Back to top ]