
Fターム[3C007ES05]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 4つ (99)
Fターム[3C007ES05]に分類される特許
1 - 20 / 99
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
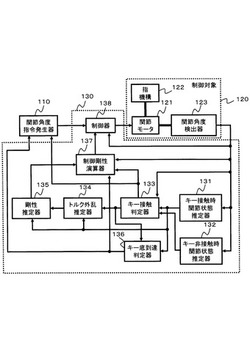
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
ロボットハンド及びロボット装置

【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
樹脂成形品の把持装置
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
把持機
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
指ユニット及び把持装置
【課題】形状が複雑なものや破損したり傷付きやすい把持対象物であっても、適切に掴むことが可能な指ユニット及び把持装置を提供する。
【解決手段】把持装置を構成する指ユニットは、ベース部材22の表面に指腹機構部24を設けた構成とされている。指腹機構部24は、把持対象物に対して面接触可能な表層部26と、表層部26に追従して変形可能な中間部材28と、表層部に対して裏面側から押圧可能な支持部材30とを有し、ベース部材22と表層部26との間に中間部材28及び支持部材30が配された構造とされている。指腹機構部24は、把持対象物との接触に伴って表層部26に対して圧力が作用すると、支持部材30を支点として表層部26の姿勢が把持対象物の表面に沿うように変化し、把持対象物側に作用する圧力の局所的上昇が防止される。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
把持装置、ロボットシステム及び把持方法
【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
ロボットハンドのフィンガ構造
【課題】部品Pを複数のフィンガ72により把持するロボットハンド7において、あまりコストのかからない簡単な構造で所要の把持性能が安定して得られ、十分な耐久性を確保できるとともに、狭隘な環境下でも使用しやすい優れた構造のフィンガ72を提供する。
【解決手段】複数のフィンガ72のそれぞれにコイルばね81を巻き付け、その両端を除いた中間部分の巻き線をフィンガ72の外周に沿って長手方向に変位可能に取り付ける。こうすると、それらのフィンガ72によって取り囲むように部品Pを把持したときに接触点Cの数が増大する可能性があり、個々の接触点における摩擦力はあまり大きくなくとも、部品Pを安定して把持することができる。部品Pの寸法、形状等に応じてコイルばね81の巻き線の太さやピッチを選定することが好ましい。
(もっと読む)
ロボットハンド
【課題】任意の形状を有する対象物体を安定して把持することができるロボットハンド機構を提供することにある。
【解決手段】ロボットハンド機構においては、第1及び第2可動部305A、305Bが直動機構304に移動可能に支持される。第1可動部305Aは、接続機構401を介して指部101Aの受動回転部104及び指部101Cの受動回転部104に結合される。第2可動部305Bは、接続機構401を介して指部101Bの受動回転部104及び指部101Dの受動回転部104に結合される。直動機構が駆動モータ301によって駆動されると、第1及び第2可動部305A、305Bが互いに反対向きに移動される。第1及び第2可動部305A、305Bの直動運動に伴って、接続機構401によって各受動回転部104が回転される。この結果、指部101A、101B、101C、101Dの駆動方向が変更される。
(もっと読む)
万能チャック
【課題】 従来、工場等の製造現場で、品物、ワークの物を、確実、かつ安定的に挾持、搬送できる機具として、万能チャックがある。万能チャックは、大小の物を、挾持、搬送する手段として活用されている。しかし、異形、歪等の如く、特殊な形状の物を、挾持、搬送する手段として、希望する器具がないのが現況である。
【解決手段】 作業機械のアームに取付ける本体に、対で枢支した第一アームと、第一アームを駆動するモータと、第二アームとを駆動するモータと、第三アームを駆動するモータと、垂下杆と、垂下杆の先端に設けた挾持具で構成した万能チャックで、第一〜第三アームを、本体と、第一アーム、第二アームに移動可能に構成し、第一〜第三アームの移動を、本体と、第一アーム、第二アームに設けたモータと、モータの駆動で回転する移動機構とする万能チャックである。
(もっと読む)
マーキング装置およびマーキング方法
【課題】マーキング装置およびマーキング方法において、識別マークを形成できる領域が狭いワークの場合であってもワークに効率よく識別マークを形成することができるようにする。
【解決手段】把持可能領域Hを有するワークWに識別マークMを形成するマーキング装置1であって、把持可能領域HにおいてワークWを把持する把持アーム部6と、把持アーム部6に設けられ、ワークWを把持するとともに、把持した位置に識別マークMの少なくとも一部を形成するマーキング把持部6bと、を備えるものを用いる。
(もっと読む)
ロボットハンド及びロボット装置
【課題】安定して対象物を把持することができるロボットハンド及びロボット装置を提供すること。
【解決手段】所定位置を囲うように配置された支持部材を有する複数の指部と、複数の指部の一端部と連結する連結部と、を備えたロボットハンドであって、少なくとも1つの指部は、屈曲部を有する接触部材と受動素子とを有し、接触部材は屈曲部で回転可能に支持部材に支持され、受動素子は支持部材と接触部材とに接続されている。
(もっと読む)
試料加工装置
【課題】本発明の課題は、微小試料片およびまたはその周辺領域を汚染することなく、確実で安定的な微小試料片の分離、摘出、格納を行う装置および方法を提供することにある。
【解決手段】試料基板から観察すべき領域を含む試料片をイオンビームスパッタ法により分離し、試料を押し込んで保持し、引き抜いて分離するための、根元に比較して先端が細く、該先端部が割れている形状で、該形状により得られる試料片を保持する部位の弾性変形による力で試料片を保持する棒状部材からなるはり部材を用いて、前記試料片を試料基板から摘出し、試料片を載置するための載置台上へ移動させた後、前記はり部材と前記試料片を分離することで該試料片の格納を行う。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
チャッキング装置
【課題】装置の上下寸法をコンパクトに抑えうる簡単な駆動力伝達機構を備えたチャッキング装置を提供する。
【解決手段】装置本体上に揺動可能に枢支され、四節リンク機構を構成する互いに平行な第一揺動レバー及び第二揺動レバーと、この四節リンク機構を構成し、両揺動レバーを揺動可能に連結する連結アームと、両揺動レバーを揺動駆動する送りネジ機構と、それぞれがチャック部材を備え、相互に接近離間することによりチャック部材同士が対象物を把持及び把持解除するように構成された第一及び第二の支持部材とを備えており、各揺動レバーにおける、四節リンクの対角の関節より外方の点においてそれぞれ対応する支持部材に連結されており、両揺動レバーが揺動することにより、支持部材同士が相互に接近離間するように構成されている。
(もっと読む)
ピッキング方法およびハンド装置
【課題】箱体内の対象を、どのような形状であっても、またどのような姿勢であっても、ハンドによって確実にピッキングする。
【解決手段】ハンドによって4つのコーナーを有する箱体B内の対象Tをピッキングするピッキング方法において、ハンドは、略同一方向に延びて該同一方向と略直交する平面方向に相対的に移動する4本の把持爪12a〜12dを備えている。まず、ハンドの把持爪12a〜12dそれぞれを開口を通じて箱体B内に進入させて、コーナーC1〜C4それぞれに配置する。その後、把持爪12a〜12dそれぞれを互いに接近するように前記平面方向に相対的に移動させて対象Tに接触させることにより、4本の把持爪12a〜12dによって対象Tを把持する。
(もっと読む)
1 - 20 / 99
[ Back to top ]