
Fターム[3C007HS14]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 流体式 (364) | シリンダ (292) | 気体 (142)
Fターム[3C007HS14]に分類される特許
1 - 20 / 142
直交型組付装置
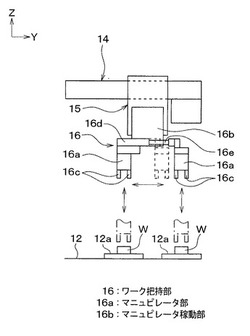
【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
チャック装置

【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
(もっと読む)
搬送ハンド
【課題】中央部分が中空のワークであっても、確実に搬送できるとともに、設備を簡素化できる搬送ハンドを提供すること。
【解決手段】第1把持部11、第2把持部12、第3把持部13及び第4把持部14は、複数のバルブガイドWa又はバルブシートWbを把持して搬送し、略半円形状の外壁101aと略半円形状の内壁101bを有する一対の把持手段101と、一対の把持手段101を相互に近接又は離間させる押圧手段102と、を備え、これら一対の把持手段101は、押圧手段102により近接されることで内壁101bによってバルブガイドWaを把持し又は押圧手段102により離間されることで外壁101aによってバルブシートWbを把持し、複数のバルブガイドWa又はバルブシートWbの配列方向に沿って、複数連接されている。
(もっと読む)
作業システムおよび作業方法
【課題】沸騰水型原子炉のジェットポンプ近傍などの狭隘な領域に設置された配管の溶接部の洗浄、点検、検査予防保全、補修などの作業を容易に行えるようにする。
【解決手段】作業システムに、ベース24と、ベース24を水平に対して傾斜させる第1ロータリシリンダ27と、ベース24を上下に移動させる伸縮ガイド19と、アーム20と、アーム20を回動させる回転ローラ25と、アーム20に取り付けられた検査プローブ23とを備える。アーム20は、リンク22で結合された複数の部分からなる。アーム20は、隣り合う部分を結合するエアシリンダ21の伸縮により、その形状が変化する。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
窓ガラスなどの清掃装置
【課題】建造物のガラス製壁面或いは窓面などに真空吸着し且つこれに沿って移動しながら清掃作業を施す装置を提供する。
【解決手段】横並びで配置された3式の吸着ユニットにおいて、吸着ユニットの各々は、吸着ユニットを表面と交差する方向に出入りさせる吸着ユニット前後方向出入手段80を具備し、隣り合った吸着ユニット同士は、吸着ユニット前後方向出入手段を介して横方向伸縮手段62により連結されて横一列吸着ユニット群を構成しており、隣り合った該横一列吸着ユニット群同士は、該吸着ユニット前後方向出入手段を介して縦方向伸縮手段68により連結される。吸着ユニットの各々は、表面に吸着しながら且つ該表面に沿って移動される吸着可動状態と、該表面に係止される吸着係止状態と、表面から隔離しながら且つ該表面に沿って移動できる非吸着可動状態、の以上3つの状態のいずれかを選択できる。
(もっと読む)
作業補助装置
【課題】従来に比して、製造ラインでのレイアウト性及び生産効率を向上できる作業補助装置を提供すること。
【解決手段】ワークWを保持するアタッチメント5を有し、作業者Sが付加する操作力に基づいてワークWを搬送するアーム3と、アーム3を駆動させるエアシリンダ21と、エアシリンダ21に出力するエアの圧力を調整する電空レギュレータと、電空レギュレータと通信可能に設けられて、電空レギュレータの出力エア圧を制御する制御装置7と、を備えることを特徴とする作業補助装置1である。
(もっと読む)
クランパ、水室内作業装置およびクランプ方法
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
クランパおよび水室内作業装置
【課題】管材を安定的にクランプ保持できるクランパおよびこのクランパを備える水室内作業装置を提供すること。
【解決手段】このクランパ23は、挿入部2311aを管材に挿入して管材をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。また、クランプ機構231が、挿入部2311aを有するクランプ本体2311と、挿入部2311aから突出して管材に摩擦接触すると共に挿入部2311aの挿入方向に進退可能なコッタ2312と、挿入部2311aの挿入方向逆側に牽引されたときにコッタ2312を押圧して挿入部2311aから突出させるピストンロッド2313と、クランプ本体2311に一体化されてピストンロッド2313を牽引するロッドシリンダ2315とを備えている。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
把持装置
【課題】一対の開閉レバー部の開閉方向に沿った横幅を小さくすることができ、小スペースで設置することが可能であること。
【解決手段】ロッド軸Oに沿って上下動可能とされ、下端部に連結ブロック41が取り付けられたロッド部2と、左右軸L1方向に沿って向かい合うように配設されると共に、中間部3cが前後軸L1に平行な支点軸部50に軸支された一対の開閉レバー部3と、連結ブロックと開閉レバー部の上端部3aとをそれぞれ連結すると共にロッド部の上下動に伴って開閉レバー部を左右軸方向に揺動させるリンク機構4と、を備え、開閉レバー部には、中間部から上端部に至る部分の少なくとも一部に切欠部55が形成され、一対の開閉レバー部が、切欠部内にロッド部及び連結ブロックを入り込ませた状態で左右軸方向に向かい合うように配設され、それぞれの上端部が前後軸方向に沿ってロッド部及び連結ブロックの両側に位置している把持装置を提供する。
(もっと読む)
ワーク把持装置
【課題】把持部材をワークの相対個所に等しく圧接させて把持する把持態様に限定されず、各種把持態様でワークを把持する。また、一対の把持部材を個々に移動してワークを把持することができ、装置を小型化及び軽量化する。
【解決手段】互いの軸線が平行し、かつ互いの作動方向が反対になるように配置された2個のシリンダの各ピストンロッドに把持部材をそれぞれ取り付け、各シリンダの作動に伴って各把持部材を互いに近づく方向又は離間する方向へ移動してワークを把持する。各ピストンの背圧側にピストンロッドと軸線が一致し、かつシリンダ外へ突出してそれぞれ設けられたガイドロッドと、各把持部材にそれぞれ設けられ、シリンダ外へ突出した各ガイドロッドを挿通して支持する支持部材とを備える。
(もっと読む)
光ポテンショメータ及びマニピュレータ
【課題】例えばマニピュレータを構成する径が細い管状の細径管の内部にも配設可能な光ポテンショメータ、及び該光ポテンショメータを具備するマニピュレータを提供すること。
【解決手段】一端が閉じられた金属パイプ114と、金属パイプ114に対して入れ子構造の関係を有し、金属パイプ114をその長手方向に移動可能に案内する金属パイプ112と、金属パイプ114内部に光を供給する光源122及び光ファイバ118と、金属パイプ114内部からの反射光量の変化を検出する光パワーメータ124と、を光ポテンショメータに具備させる。金属パイプ114は、その長手方向に沿ってスリット132を備え、光パワーメータ124は、金属パイプ114の長手方向における移動に伴って生じるスリット132の開口量の変化に起因する金属パイプ114内部からの反射光量の変化を検出する。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化を図る。
【解決手段】基板100と基板200を、Z軸が中心軸となるように、XY平面に平行に配置する。4本のリニアアクチュエータP10〜P40を、X軸の正側および負側、Y軸の正側および負側にそれぞれ配置し、その上下両端を、転がり球面軸受Q10〜Q40、R10〜R40を介して各基板に接続する。各基板の中心には、接続部材P50を配置し、上端を転がり球面軸受Q50を介して基板100に接続し、下端を基板200に固着する。P10〜P40を伸縮駆動することにより、上方基板100をX軸/Y軸まわりに回転駆動させる。可撓性導電膜201〜204と、基板300上の固定電極E10〜E40とによって容量素子が構成され、その静電容量値の変化に基づいて、基板100に作用したX軸/Y軸まわりのモーメントMx,Myを検出する。
(もっと読む)
開閉チャック
【課題】小型の開閉チャックを提供する。
【解決手段】シリンダ室及び収容空間を内部に有しており、外部とシリンダ室とを連通する第1の長孔及び外部と収容空間とを連通する第2の長孔が形成されているハウジングと、シリンダ室内を摺動し、第1のラック部分が形成されたピストンロッドとピストンロッドの両端に設けられた第1及び第2のピストンヘッドとを有する、ピストンと、ピストンと平行に移動可能なよう収容空間に収容され、第1のラック部分と平行に延びる第2のラック部分が形成されているラック部材と、第1及び第2のラック部分と噛み合うピニオンと、第1の長孔を介してピストンに連結されている第1のスライダと、第2の長孔を介してラック部材に連結されている第2のスライダと、を備え、第1のピストンヘッドとシリンダ室の一方の端部との間に第1の密閉空間が画定され、第2のピストンヘッドとシリンダ室の他方の端部との間に第2の密閉空間が画定されている、開閉チャック。
(もっと読む)
ロボット用ロックシステム及びそのロック方法
【課題】システムに通電していない状態で、関節部分を自由に固定、及び解放できるロックシステム及びそのロック方法を提供すること。
【解決手段】本発明にかかるロックシステムは、モータが通電していない際に、モータにより駆動する駆動軸の回転を固定する。少なくとも2以上の方向から駆動軸を挟む2以上の固定パッドと、固定パッドを、内部の空気圧を変化させることにより、駆動軸の中心方向に移動させるシリンダー部と、シリンダー部に空気を挿入する第1の挿入口と、排出する排出口とを有し、固定パッドは、駆動軸側とは反対側の端部がばねの一端と接続され、ばねの他端はシリンダー部と接続され、シリンダー部は、シリンダー内の空気圧を上げることで、固定パッドを駆動軸の中心方向に押し出し、シリンダー内部の空気圧を下げることで、ばねの弾性力により、固定パッドを駆動軸側とは反対の方向に移動させる。
(もっと読む)
ウエハ搬送ロボット及びウエハの解放方法
【課題】ウエハの把持を解放した後におけるウエハの位置ズレを抑え、且つウエハの搬送に要する時間を短縮する。
【解決手段】ウエハ2が載置されるハンド20と、ウエハ2が載置される載置位置Aからウエハ2をハンド20から降ろす降ろし位置Dまでハンド20を移動させるための移動装置10において、ハンド20は、載置されたウエハ2を受け部23に押圧してウエハ2を把持し、且つ、押圧を解除してウエハ2を解放するための押圧装置30を備えており、制御装置40は、載置位置Aにてウエハ2が載置されると押圧装置30を制御してウエハ2を把持し、移動装置10を制御してハンド20をウエハ2を押圧する方向に移動させながら減速して降ろし位置Dへと移動させ、且つ、ハンド20が減速している間に、押圧装置30を制御してウエハ2を解放させるように構成されている。
(もっと読む)
コネクタ自動挿抜装置
【課題】 多数のRFコネクタを有した供試体において、予め手作業でRFコネクタに終端器を装着することなく、複数のRFコネクタに対して終端器を自動挿抜してRFコネクタのRF特性計測を行うコネクタ自動挿抜機構を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を保持器から取り出して把持する把持部と、把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、およびロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
ハンド装置
【課題】大きさの異なる複数の所定ワークを把持する際に、ワークの大きさに合わせて把持状態検出センサの位置調整を行う必要がなく、フィンガの開閉時間及び把持力の変動を小さくすることができ、コストの増大及び生産性の低下を抑制することができるハンド装置を提供する点にある。
【解決手段】ワークを把持する把持手段2のオン−オフ式の開閉動作を行ってワークの脱着を行うハンド装置1であって、把持手段2が複数のフィンガ3,3を同期させて開閉するものであり、フィンガ3,3に、被把持部の大きさが異なる複数のワーク又は複数の被把持部の大きさが異なる単一のワークを把持する、複数の把持部C1,C2を設け、把持部C1,C2を、対応する前記被把持部を把持した際におけるフィンガ3,3の開き位置が同じになるように、前記被把持部の所定の大きさに合わせて形成した。
(もっと読む)
1 - 20 / 142
[ Back to top ]