
Fターム[3C007ES09]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 多節型 (279) | 各関節が連動する (62)
Fターム[3C007ES09]に分類される特許
1 - 20 / 62
人間型ハンド
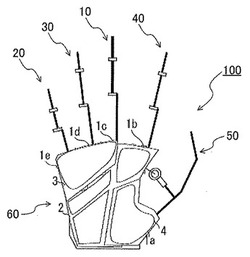
【課題】実用性を高めた簡潔構造の人間型ハンドを提供することである。
【解決手段】手の骨格を有する人間型ハンド100において、前記人間型ハンド100の掌骨格に複数の掌部2、3、4を固定し、前記複数の掌部2、3、4のそれぞれが、シート部材21、31、41に弾性部材22、23、24、32、42を貼付して成り、前記人間型ハンド100によって対象物を掴む際に、前記複数のシート部材2、3、4同士が重なり合うとともに該シート部材21、31、41が撓んで、前記弾性部材22、23、24、32、42が前記対象物を支持することを特徴とする。
(もっと読む)
マニピュレータ用関節部

【課題】作業効率の向上と組立てコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】軸受ユニット8のハウジング14には、ハウジング14の回転中心O2を通り径方向に延びる直線と略直交する平坦面14bが形成され、回動アームのユニット装着孔7には、外径側に窪む係止凹部7aが形成されている。ハウジング14の平坦面14bとユニット装着孔7の係止凹部7aとの間には、板状の係止部材30が設けられて、ハウジング14がユニット装着孔7に回転不能に固定される。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
把持動作機能を備えるロボットフィンガーユニット
【課題】把持動作機能を備えるロボットハンド全体の体積が小さく、フィンガー動作の自由度と把持力が高いロボットフィンガーユニットを提供する。
【解決手段】ベースと、当該ベースに固定した、回転軸を備える駆動機構と、片端側を回転軸と平行に設置した平行車軸を介し、平行車軸を回転軸として回転運動可能にベースに設置した第1部材と、第1部材の他端側に、回転軸と垂直に設置した垂直車軸を介し、垂直車軸を回転軸として回転運動可能に第1部材と連結した第2部材と、垂直車軸に垂直車軸を回転軸として回転可能に設置した滑車と駆動ケーブルとを備え、駆動ケーブルは、回転軸に巻き付けて固定した片端部と第2部材に固定した他端部と滑車に巻き付けた中間部とを備えるロボットフィンガーユニットを採用する。
(もっと読む)
ロボットの関節構造、ロボットフィンガー及びロボットハンド
【課題】リンク部の回転角度を大きくすることなく、大きな物体から小さな物体までを確実に把持することができるロボットの関節構造、その関節構造を備えたロボットフィンガー、及びそのロボットフィンガーを備えたロボットハンドを提供する。
【解決手段】相対的に移動可能に連結された第1リンク部1及び第2リンク部2と、第2リンク部2を第1リンク部1に対して回転させると共に第1リンク部1の長手方向(X方向)に沿って移動させる駆動手段4と、を備えることを特徴とする。
(もっと読む)
ロボット指アセンブリ
【課題】ロボット指アセンブリを提供すること。
【解決手段】ロボット手が、第1、第2、および第3の指骨を有する指を備える。第1の関節が、ベース構造体に対して第1の指骨を回転自在に連結する。第2の関節が、第2の指骨に対して第1の指骨を回転自在に連結する。第3の関節が、第2の指骨に対して第3の指骨を回転自在に連結する。第2の関節および第3の関節は、第2の指骨に対する第3の指骨の位置が第1の指骨に対する第2の指骨の位置によって決定されるように、運動学的にリンクされる。
(もっと読む)
流体圧伝達装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置を提供する。
【解決手段】流体圧伝達装置は、高圧駆動流体圧シリンダ55,56と、低圧駆動流体圧シリンダ51〜54と、複数の従動流体圧シリンダ41〜46と、駆動流体圧シリンダ51〜56に接続された駆動側流体圧伝達路Lm1〜Lm6と、従動流体圧シリンダ41〜46に接続された複数の従動側流体圧伝達路Ls1〜Ls6とを備える。各駆動側流体圧伝達路Lm1〜Lm6は、開閉弁V11〜V66を介して全ての従動側流体圧伝達路Ls1〜Ls6と接続されている。
(もっと読む)
流体圧伝達装置及びロボットハンド装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置、及びこれを備えたロボットハンド装置を提供する。
【解決手段】流体圧伝達装置は、複数の主駆動流体圧シリンダ371,372と、主駆動流体圧シリンダ371,372のシリンダ室3711,3712と流体圧伝達路381,382を介してシリンダ室23a,24aが連通される複数の従動流体圧シリンダ23,24と、ピストン412で2つのシリンダ室41a,41bに区切られた副駆動流体圧シリンダ41とを備え、主駆動流体圧シリンダ371,372が発生した流体圧を従動流体圧シリンダ23,24に伝達する。ピストン3711,3712は主モータ40により、ピストン412は副モータ43により、夫々駆動される。流体圧伝達管381,382と副駆動流体圧シリンダの各シリンダ室41a,41bとは連通管421,422に介して連通する。
(もっと読む)
多指ハンド装置
【課題】拇指機構、示指機構及び中指機構を用いて物体の安定した把持状態を実現することができる多指ハンド装置を提供する。
【解決手段】屈伸機能を有する示指機構6、中指機構7、及び拇指機構5を備える多指ハンド装置1において、拇指機構5の2軸で回動する手根中手関節19,20のうちの第2の回動軸20を、その軸線aが示指機構6の中手指節関節15,16と中指機構7の中手指節関節15,16との間を通って延びるように配設する。
(もっと読む)
流体圧アクチュエータ
【課題】第1の流体圧シリンダにおいて流体圧を効率良く発生させることができてコンパクトな流体圧アクチュエータを提供する。
【解決手段】
第1の流体圧シリンダ37からの流体圧を第2の流体圧シリンダ23に付与して第2の流体圧シリンダから駆動力を出力する。第1の流体圧シリンダ37は、第1のシリンダ本体371と、中空の第1のピストン372と、進退する第1のピストンに接して第1のシリンダ本体を閉塞するシール部材47とを備える。第1のピストンに沿ってボールねじ38を挿入する。ボールねじを回転駆動手段40により回転させ、第1のピストンに固設されたナット39を介して第1のピストンを進退させる。第2の流体圧シリンダは、第1の流体圧シリンダからの作動用流体が第2のシリンダ本体231に供給され、第2のピストンの往復動によりピストンロッド233の進退動作を駆動力として出力する。
(もっと読む)
ロボットハンド装置
【課題】 構造が簡素であり単一のモータで2軸回りに指機構を操作させることができるロボットハンド装置を提供する。
【解決手段】 ロボットハンド装置10は、基部12に固定されたモータ14、モータ14の駆動軸14aに基端部が固定され基部12から延設される基部リンク部材26と先端リンク28からなる指機構16、モータ14の駆動軸14aに設けられた第1軸P1を有する第1プーリ18、先端リンク部材28に設けられた第2軸を有する第2プーリ20、基部12に一端が固定され指機構16の先端リンク部材に他端が固定されると共に第1プーリ18及び第2プーリ20に掛け回されるワイヤ22を備えている。
(もっと読む)
ロボットハンド装置
【課題】指機構の構造を簡単として軽量コンパクトに構成することができるロボットハンド装置を提供する。
【解決手段】手嘗部1と、指節部材7,9,11を関節軸6,8,10を介して連設してなる指機構2と、指節部材7,9,11を貫通する撓み自在の回転伝達軸18と、指節部材7,9,11の雌ねじ部15,16,17に螺合する雄ねじ部19,20,21と、回転伝達軸18を回転駆動するモータ25とを設ける。回転伝達軸18の回転により、指機構2の曲げ動作及び延ばし動作を行う。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
多指ハンド装置
【課題】拇指機構をコンパクトに構成し且つ十分な把持力を得ることができる多指ハンド装置を提供する。
【解決手段】拇指機構5に、第1の回動軸191と第1の回動軸191の軸線に交差する軸線を有する第2の回動軸との2軸で回動する手根中手関節19,20を設ける。第1の回動軸191の回動を駆動する第1の駆動シリンダ29と、第2の回動軸の回動を駆動する第2の駆動シリンダ34とを設ける。第2の回動軸を中空に形成して基部4に配設し、第2の回動軸の内部に第1の駆動シリンダ29を設ける。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
ロボットハンド装置
【課題】 人間の手のように種々の動作表現をすることができるロボットハンド装置を提供する。
【解決手段】 ロボットハンド装置10は、基部12から延設される複数の指機構14と、第1伝達機構16を介して複数の指機構14を夫々異なる位相で作動させる第1駆動モータ18と、第2伝達機構20を介して複数の指機構14を夫々異なる位相で作動させる第2駆動モータ22とを備える。各指機構14が夫々異なる位相で作動することにより、ロボットハンド全体として人間の手のように種々の動作表現を実現する。
(もっと読む)
1 - 20 / 62
[ Back to top ]