
Fターム[3C007EV08]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | ローラを有するもの (25)
Fターム[3C007EV08]に分類される特許
1 - 20 / 25
デパレタイズロボットのロボットハンド
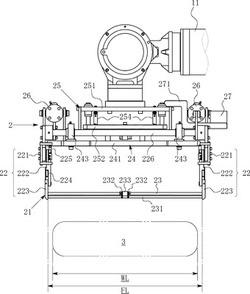
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
ハンド及びロボット

【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
回転体の把持装置
【課題】簡単な構成で、タイヤなどの回転体の中心位置を位置決めできる回転体の把持装置を提供する。
【解決手段】タイヤ把持装置10を、把持アーム11〜13と、基台21と、基台21に立設された中心ピン部材22と、中心ピン部材22に回転可能に取付けられた板状部材23と、固定側ピン部材P1k(k=1〜3)、可動側ピン部材P2k、固定側アームA1k、可動側アームA2k、及び、中間ピン部材P3kとを備えた連結機構24とから構成するとともに、中心ピン部材22の下端と固定側ピン部材P1kを結ぶリンクを固定リンクとし、中心ピン部材22の上端と可動側ピン部材P2kを結ぶリンクと可動側アームA2kと固定側アームA1kとをそれぞれ第1〜第3の可動リンクとした3つのリンク機構により、固定側アームA1kの先端に取付けた把持アーム11〜13を拡幅して、タイヤTの内縁部を把持するようにした。
(もっと読む)
救助ロボット
【課題】簡単な構造で、要救助者を確実かつ円滑に救助し、救出時間の短縮を図る。
【解決手段】救助ロボットは2機のクローラ5、6にそれぞれ、2台のコンベア8、9が分割配置され、要救助者の救出に際して、前側のコンベア8をクローラ5の進行方向前方の走行面に向けて前進傾動させ、各クローラ5、6の低速の前進走行とともに各コンベア8、9を各クローラの走行方向とは反対方向に各クローラの走行速度と同期させて回転駆動し、前側のコンベア8の先端を要救助者が居る地点の要救助者の接触面と要救助者の身体との間に潜り込ませて当該要救助者を前後の各コンベア8、9上に引き上げ収容する。
(もっと読む)
ロボットハンド
【課題】ワークチャック装置のチャック位置にワークを自動で精度良くセットできるロボットハンドを提供すること。
【解決手段】ロボットアームに装着されるものであって、3個以上のハンド爪14によりワーク10の内周又は外周を把持し、ワークチャック装置のチャック位置にワーク10を挿入させるロボットハンドにおいて、3個以上のハンド爪14に把持されたワーク10が軸心を中心とする回転方向に外力を受けた場合に、ワーク10を自由に回転させる自由回転機構を有する。
(もっと読む)
搬送ハンド装置
【課題】板材の搬送において、当該板材との干渉を抑制し、所定位置に正確に板材を配設することのできる搬送ハンド装置を提供すること。
【解決手段】搬送ハンド50が、板材82をマグネット部54の電磁石62により吸着して母材84上にある所定の溶接位置へと搬送した後、当該所定の溶接位置より所定間隔空けた真上位置で当該板材の吸着を解除することでマグネット部及びガイド部58により板材の姿勢を保持しつつ当該所定の溶接位置に当該板材を落下させて配設する。
(もっと読む)
ワーク把持装置
【課題】把持力の調節が容易なワーク把持装置を提供すること。
【解決手段】ワーク把持装置は、第1ねじ部3aと、第1ねじ部3aに対して逆向きのねじ山を有する第2ねじ部3bとが形成されたボールねじ軸3と、ボールねじ軸3を回転駆動する電動モータ4と、ワークWを挟んで把持する第1把持手段5a及び第2把持手段5bと、第1把持手段5aを直線移動させるために第1ねじ部3aに螺合している第1移動体6aと、第2把持手段5bを直線移動させるために第2ねじ部3bに螺合している第2移動体6bと、第2把持手段5bを第2移動体6bに対して直線移動させるために第2移動体6bと第2把持手段5bとの間に配設された流体圧シリンダ装置8と、を具備する。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチの変更動作を行う場合であっても、構成の簡素化が可能でかつハンドに搭載される基板を適切に把持することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、所定のピッチで上下方向に重なるように配置される基板の搭載部を有する複数のハンドと、搭載部間のピッチを変えるピッチ変更機構と、ハンドに搭載される基板を把持するための把持機構24とを備えている。把持機構24は、複数の基板の把持部80と、基板の把持方向へ把持部80を付勢する複数の付勢部材と、把持部80に当接して基板からの退避方向へ複数の把持部80を移動させる移動部材82とを備えている。複数の把持部80および複数の付勢部材のそれぞれは、複数のハンドのそれぞれに保持され、移動部材82は、把持部80が基板を把持しているときに把持部80から離れている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
マニピュレータ
【課題】歯車部品を歯面に当接するガイド鋼球で支持する支持台に効率よく装着する。
【解決手段】ハンド部14は、歯車部品であるワーク16を把持する3個の爪58を有する。3個の爪58のそれぞれが径方向外に向けてにスライドして、ワークの円筒面20に当接し、これを把持する。爪58は、回動自在に支持されたローラ74を有する。ワークは、このローラを介して支持されるため、ハンド部14に把持されている状態であっても回転自在となっている。
(もっと読む)
基板アライメント機構を備えた搬送ロボット及びそれを備えた半導体製造装置
【課題】基板アライメント機構を備えた搬送ロボットを提供すること。
【解決手段】最先端のアーム5に設けられ、ハンド6を最先端のアーム5の延在方向に前後移動させるハンド駆動機構と、最先端のアーム5に設けられ、矩形基板Rの側面を把持して矩形基板Rをハンド6に対してアライメントするアライメント機構7と、を備え、ハンド駆動機構によって最先端のアーム5上にスライドさせた矩形基板Rに対してアライメント機構7がアライメントするよう構成した。
(もっと読む)
弦楽器演奏用のロボットハンドおよび弦楽器演奏用のロボット
【課題】大出力のアクチュエータを用いることなく、大きなビブラートストローク量を確保することが可能な弦楽器演奏用のロボットハンドを提供すること。
【解決手段】指部本体と、該指部本体に取り付けられ、弦を押さえるための接触子を先端に有した揺動リンク機構と、を備える指部を含む、弦楽器演奏用のロボットハンドにおいて、接触子を弦に押し付けるように指部本体を移動させた際に、揺動リンクが弦に対して相対的に位置を変化しながら揺動するように指部を構成するとともに、揺動リンクの揺動を妨げる向きに力を付与する力付与手段が設けられており、接触子が弦と接触を保った状態で、接触子を弦に押し付ける方向に指部本体を移動させることで、揺動リンクが揺動し、接触子が弦を押さえたまま弦の長手方向に移動可能となるように構成した。
(もっと読む)
産業用ロボット
【課題】機械的な構成で搬送対象物を把持する場合であっても、小型化を図ることが可能な産業用ロボットを提供すること。
【解決手段】ロボット1は、ハンド3、4と、ハンド3、4を保持するハンド保持アーム7を含む多関節アーム部5とを備えている。ハンド3、4は、ウエハ2に当接してウエハ2を把持する把持部42、52と、ウエハ2を把持する方向へ把持部42、52を付勢する付勢部材とを備え、ハンド保持アーム7は、多関節アーム部5の伸縮動作に伴って、ハンド3、4に対して相対回動するカム部材を備えている。カム部材の内周側には、把持部42、52が当接するカム面が、収納部からウエハ2を搬出する前に把持部42、52をウエハ2から退避させるとともに、収納部からウエハ2を搬出する際の多関節アーム部5の伸縮動作に伴って、ウエハ2を把持する方向へ把持部42、52を移動させるように形成されている。
(もっと読む)
基板検査装置
【課題】真空吸着状態が切れても基板の健全性を維持し、検査時に発見した基板の裏面の汚れ等をクリーニングすることを可能にする。
【解決手段】基板Aの少なくとも裏面の目視検査を行うための基板検査装置1であって、基板Aの裏面を真空吸着する吸着保持部6と、該吸着保持部6により吸着された状態の基板Aの外周縁に接触して半径方向に挟む複数の接触部10を有する押圧保持部8とを備える基板検査装置1を提供する。
(もっと読む)
産業用ロボット
【課題】簡易な構成で、搬送対象物の把持、解放を行うことができる産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物2を搭載するハンド3と、ハンド3を保持する多関節アーム部とを備えている。ハンド3は、搬送対象物2を把持するための把持部28と、搬送対象物2から退避させる方向へ把持部28を付勢する付勢部材29とを備えている。把持部28は、搬送対象物2に当接する把持部材34と、多関節アーム部の伸縮動作に伴う慣性力で、把持部材34が搬送対象物2に当接する方向へ把持部材34を移動させる重量部材35とを備えている。
(もっと読む)
産業用ロボット
【課題】機械的な構成で搬送対象物を把持しても、搬送対象物に与える衝撃を抑制することが可能な産業用ロボットを提供すること。
【解決手段】ロボット1は、ウエハ2を搭載するハンド3と、ハンド3を保持する第2アーム6を有する多関節アーム部4とを備えている。ハンド3は、ウエハ2を把持するための把持部28と、ウエハ2を把持する方向へ把持部28を付勢する付勢部材とを備え、第2アーム6は、ハンド3の回動中心から偏心した位置に固定され、ウエハ2の搬出開始前に把持部28に当接して把持部28をウエハ2から退避させる偏心部材31を備えている。偏心部材31は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作に伴って、把持部28がウエハ2を把持する方向へ移動するように、把持部28に対して相対移動し、把持部28は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作の減速時に、ウエハ2の把持を開始する。
(もっと読む)
ワーククランプ装置
【課題】本発明はCD等の円形ワークの弧面を均等な接圧力を以って捕捉し、同ワークの芯出しを行いながら検査装置等に転載できるクランプ装置を提供する。
【解決手段】一対のクランパー16,17に円形ワーク10の左右弧面14,15を接圧点P1,P2とP3,P4で加圧当接する接圧部18,19と20,21を具備せしめると共に、上記クランパー16,17に一対のリンク22,23の一端を枢支点24,26を介して枢結し、一対の可動ブラケット11,12に上記リンク22,23の他端を枢支点25,27を介して枢結し、上記可動ブラケット11,12に設けた押圧部28と29により上記クランパー16,17を押圧して上記リンク22,23とクランパー16,17の上記枢支点を介しての回動を誘起しつつ上記接圧部を円形ワーク10の左右弧面14,15に加圧当接せしめて捕捉するワーククランプ装置。
(もっと読む)
把持装置、及び、ハニカム構造体の製造方法
【課題】 ハニカム構造体を適切な姿勢で把持し、所定の位置に簡便に搬送して載置することができる把持装置を提供すること。
【解決手段】 本発明の把持装置は、回転軸が平行となる少なくとも2個の支持ローラを有する第一の把持部と、上記第一の把持部の支持ローラに対向する少なくとも1個の支持ローラを有する第二の把持部と、上記第一の把持部及び上記第二の把持部を有する少なくとも1つの把持機構とを備え、上記第一の把持部の支持ローラの回転軸と上記第二の把持部の支持ローラの回転軸とは平行になっており、上記第一の把持部及び上記第二の把持部の少なくとも一方を移動させることにより、上記支持ローラを介して上記第一の把持部と上記第二の把持部との間に被把持物を把持することを特徴とする。
(もっと読む)
ロボットハンド
【課題】把持又は押圧する物体の表面形状に合わせて追従することで、物体に十分な把持力又は押圧力を付与することを可能とする。
【解決手段】指部10の第1指部11に形成された凹所63の底部に、第1指部11の軸方向に並んで配されたコイルバネ77を介して押え部65を接続する。押え部65が物体200に把持力又は押圧力を付与する場合、押え部65が物体200の形状に追従できるように、指腹部65と第1指部11との間には、隙間を設ける。
(もっと読む)
1 - 20 / 25
[ Back to top ]