
Fターム[3C007EV22]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 異種の当接部を有するもの (33)
Fターム[3C007EV22]に分類される特許
1 - 20 / 33
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
ロボットハンド

【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
把持装置
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
平行開閉式チャックハンド
【課題】円・楕円などの内径部を有するワークを把持することができ、かつ把持爪の曲げ強度を高めることができ、これにより重量の大きいワークを把持する場合でも、内径部との間に必要なクリアランスを確保することができる平行開閉式チャックハンドを提供する。
【解決手段】開位置と閉位置の間で平行に開閉駆動される1対の支持部材12,14と、支持部材に片持ち支持された広幅把持爪16及び狭幅把持爪18とを備える。広幅把持爪16は、開位置において幅方向の両端部16a,16bが内径部の内周面6,7に接触し、中間部が内周面に沿って延びかつ外方に湾曲した凹部16cを有する円弧状の断面形状を有する。狭幅把持爪18は、閉位置において広幅把持爪16の凹部16c嵌合する断面形状を有する。
(もっと読む)
つかみ装置
【課題】ワークをつかんだり有底筒状のワークの内部を密閉したりするチューブ体に、ワークに付着していた異物が付着するのを抑制する。
【解決手段】チューブ体11、12は軸線O方向に沿って複数配設されるとともに、それぞれのチューブ体11、12は硬質基体15との間に互いに独立した密閉空間Aを各別に形成し、給排通路13、14は互いに独立して複数配設されるとともに、それぞれの給排通路13、14は、互いに独立した各密閉空間A内に各別に連通し、複数のチューブ体11、12のうち、軸線O方向の一端に位置する一端チューブ体12には、膨張状態で、当該つかみ装置1およびワークWの軸線O方向の相対的な接近移動に伴い、ワークWの表面に摺接する摺接部材20が配設されている。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】指部の先端側の腹部の一部を、別部材(指先部材)を用いて構成し、この指
先部材は、指部に収納した状態と、指部から突出した状態とに切り換え可能とする。また
、把持する対象物を検出する圧力センサーは、指先部材に設けておく。こうすれば、大き
な対象物や重い対象物については、指先部材を収納して指部の腹部で把持することで、し
っかりと把持することができる。また、小さな対象物については、指先部材を突出させて
、指先部材で把持する。何れの場合でも圧力センサーは1つでよいので、構造を単純化す
ることができる。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
ロボットハンド
【課題】ワークに対して、左右1対の平面により把持する場合であっても、把持状態を安定させることを可能とするロボットハンドを提供する。
【解決手段】ワーク12を把持するロボットハンド11であって、一対の爪13、14と、一対の爪13、14の間隔を開位置と閉位置の間で開閉するチャック装置16を備える。爪の一方である爪13は、その中間位置に、閉位置において、ワーク12の表面に接触する単一の凸部分13aを有し、爪の他方である爪14は、開位置と閉位置を結ぶ開閉方向に直交する方向の2箇所に、閉位置において、ワーク12の表面に接触する一対の凸部分14aを有する、ことを特徴とするロボットハンド。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
ロボットハンド用の被着装置
【課題】小さい物や紙などの薄い物を容易に掴むことのできるロボットハンドを提供すること。
【解決手段】関節機構によって指の曲げ伸ばしが可能なロボットハンドの骨格部に被着し、指または全体で物を把持するロボットハンド用の被着装置において、指部分に吸引口11〜14を有し、ロボットハンドの骨格部に着脱可能な柔軟素材からなる被着部材と、被着部材に埋め込まれ、一端が吸引口に接続されるチューブ15〜18と、チューブの他端に接続され、吸引口からの吸引によって物を吸いつける吸引ポンプ21〜24とを備える。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
物体を狭持する人工ハンドの指構造及び物体の人工ハンド狭持方法
【課題】様々な形状の物体、特に床面等に密着した紙等の薄い物ならびにクリップ等の小さく且つ端面が曲面である物を安定性良く把持することが可能で、簡単な構成要素の人工ハンドの指構造と人工ハンド狭持方法を提供すること。
【解決手段】二本の指の少なくとも一方の指を動かして平面に載置された物体を狭持する人工ハンドの指構造であって、前記一方の指1は、前記物体に当接される先端部に前記物体を掬い上げる凹曲面部12を持ち、他方の指2は、前記物体に当接される先端部に前記物体を押圧する凸曲面部22を持つ、ことを特徴とする。
(もっと読む)
物品保持装置
【課題】紐状取手を有する取手付きの物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置10は、互いに接近および離反可能であり、接近時に物品本体A1を両側方から挟持する一対の挟持体12を備える。各挟持体12の下部には、物品本体A1の下方に対して進退可能であり、進出時に物品本体A1の下面を支持する下面支持体13を設ける。挟持体12は、物品本体A1の側面のうち紐状取手A2がない部分に当接する挟持部31と、紐状取手A2に当接してこの紐状取手A2を物品本体A1の側面に略沿った状態に撓ませる取手当接部とを有する。
(もっと読む)
チャック機構およびそのチャック機構を用いたワーク搬送装置
【課題】径が異なる円筒形状のワークをチャックする際のチャック中心位置がずれないように、チャック位置を調整するようにした、チャック機構およびそのチャック機構を用いたワーク搬送装置を提供する。
【解決手段】開閉可能に構成した第1、第2アーム(11a、11b)により円筒形状のワーク(W)をチャックするものである。
第1、第2アーム(11a、11b)は、それぞれ、ワーク(W)の外周との接触箇所を、ワーク(W)の外周と二箇所で接触する接触面とした第1、第2爪部(13、14)を有し、これら第1、第2爪部(13、14)のうち、いずれか一方の爪部を、第1、第2アーム(11a、11b)の開閉方向に直交する方向に往復動可能な構成とする。
(もっと読む)
ロボットマニピュレータ
【課題】物品を把持したまま任意の角度に回転制御可能とする。
【解決手段】ロボットハンドの指部2a、2bには把持接触部31が取り付けられ、把持接触部31の中央部には突起32aが設けられ、突起32aの周囲には突起32aよりも高さの低い突起32b〜32nが配置されている。突起32aは突起32b〜32nよりも表面の摩擦係数が低く、突起32aの先端のみが物品に接触しているときは、大きな圧力で2点支持しているときと同じ結果となり、物品は並進方向には拘束されるが、支持点を通る軸周りの回転方向には自由となる。指部2a、2bの把持力を大きくしてゆくと突起32aが凹んで高さが低くなり、摩擦係数の大きい突起32b〜32nでも物品は拘束されるため、物品は並進、回転方向共に拘束される。
(もっと読む)
ロボット
【課題】本発明は、高精度の把持と柔軟な把持を同一の機構で実現するとともに、対象物との密着性も十分確保し、対象物の種別によらず安定な把持が可能となるロボットを提供する。
【解決手段】複数個のリンク4と、前記リンク4を連接する関節とからなるリンク連接機構と、指部5を備えたロボットにおいて、前記指部5は、第1の部材7と、前記第1の部材7よりも剛性が低い少なくとも1つの部材を備えたものである。
(もっと読む)
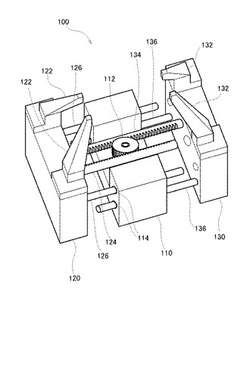
ワーク把持位置決め装置及び把持装置
【課題】ワークの加工装置又は検査装置において、前記フィルム状ワークを2箇所で把持して、X方向及びY方向に加えて回転方向の位置決めもすることができ、小型化及び低コスト化が可能なワーク把持位置決め装置及び把持装置を提供する。
【解決手段】駆動部は、Y方向に延びる1対の平行なYガイド5,12と、Yガイドに沿って移動可能のY台座21,31と、Y駆動部材6,13と、Y台座21,31上に設けられX方向に延びるXガイド2,9と、Xガイドに沿って移動可能のX台座22,32と、X駆動部材3,10と、を有する。把持部1,8は、ワークの一方の面に接触してこれを支持する基部と、ワークの他方に面側に設けられ水平軸を介して揺動可能な爪部材と、この爪部材を揺動させる爪駆動部と、を有し、爪部材は、爪駆動部により基部に向けて揺動したときに基部との間でワークを点で把持する。
(もっと読む)
1 - 20 / 33
[ Back to top ]