
Fターム[3C007HT22]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | ラックピニオン (74)
Fターム[3C007HT22]に分類される特許
1 - 20 / 74
ロボットハンド及びロボット装置
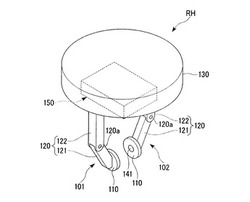
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法

【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ダブルアーム型ロボット
【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
ロボット
【課題】手先の回転角度を変更する機構の構成を小型化する。
【解決手段】本発明のロボットは、回転する手先6を上下左右に移動できるものにおいて、手先6の回転と連動して回転するピニオンギア14を備え、ピニオンギア14に押し付けられてピニオンギア14を制動するブレーキディスク15を備え、設備の1つとしてラック18を備え、ラック18の一辺部に設けられたブレード17を備え、そして、ブレード17のうちのラック18の歯が形成されている方向と直交する方向の長さは、ピニオンギア14の歯の先端がラック18の歯の先端に重なり始めた位置にてブレーキディスク15をピニオンギア14から離す方向に移動させ始め、ピニオンギア14の歯とラック18の歯が可能な限り最大の状態で深く重なったときに完全にブレーキディスク15をピニオンギア14から離すような長さとした。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
補償重量切換式荷重補償装置
【課題】 アーム等の可動部分の自重のみが補償される状態と、可動部分に荷を保持させて前記自重に荷の重量が加わった総重量が補償される状態との間で、モータ等の動力源を用いることなく自動的に補償力が切換えられるようにした補償重量切換式荷重補償装置を提供する。
【解決手段】
吊具17が空荷状態では、自重補償ばね10の補償力のみが第1ガイドロッド12を介して可動部分に作用してその自重を補償しており、この状態では付加重量補償ばね29は効果を発揮していない。吊具17に荷が掛けられるとその重量でワイヤ16が巻かれた巻胴15が回転し、これに歯車列を介して連動する切換ラック24が昇降ヘッド部7に対して上限位置から下限位置へ下降することにより、付加重量補償ばね29の補償力が第2ガイドロッド26を介して可動部分に作用し、荷の重量を含む可動部分の総重量が補償される。
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
2足移動体の補助装置
【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
駆動力解放装置
【課題】歯付部材を任意の方向へ制動したり駆動力を解放して自由移動可能にしたり駆動して移動させたりし得るようにすることにある。
【解決手段】第1ワンウェイクラッチ1と、第1ワンウェイクラッチの第1部材に出力軸を結合された第1モータ3と、第1ワンウェイクラッチの第2部材に結合された第1歯車5と、第2ワンウェイクラッチ2と、第2ワンウェイクラッチの第1部材に出力軸を結合された第2モータ4と、第2ワンウェイクラッチの第2部材に結合された第2歯車6と、第1歯車および第2歯車と噛合する歯付部材7とを具えてなる駆動力解放装置である。
(もっと読む)
移載機
【課題】フォークに光センサの配線をすることなくワークの有無を検知することができる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、フォーク4上のワークWの有無を検知する光センサ10を移載機本体7に設けるとともに、フォーク4上のワークWの有無によって開閉する遮光板12と、その作動機構13からなるシャッタ機構を有するミラー11を配設し、光センサ10の光をミラー11に反射させることによりワークWの有無を検知できるようにし、かつ、光センサ10をミラー11が通過する経路から外れた位置に取り付ける。
(もっと読む)
ロボット用取付ユニット
【課題】ロボット本体に取付けるための締結固定子が保護用のカバーの穴部から落下することがないように構成しながら、取外した締結固定子をロボット本体に確実に固定することができるロボット用取付ユニットを提供する。
【解決手段】カバー51に形成された長穴部53は、ボルト48の着座面を側方から視認可能に開口しているので、長穴部53から塵や油等の異物が入り込んでボルト48の着座面に付着した場合であっても、それらを清掃することによりボルト48を確実に締付けることができる。
(もっと読む)
ロボット
【課題】X軸方向に水平に延びる直動レールに沿って移動される移動体を備えるものにあって、必要な可動範囲及び移動速度を確保しながらも、上下方向の小型化を図る。
【解決手段】移動体3を、X軸移動用モータ5の駆動により直動レール2に沿ってX軸方向に移動するように設け、移動体3の前面部に、旋回アーム9を、r軸用モータ10の駆動によりr軸を中心に旋回するように設ける。旋回アーム9の先端に、テレスコピック型の伸縮アームからなる直動アーム12を、Y軸移動用モータの駆動によりY軸(前後)方向に自在に移動(伸縮)するように設け、直動アーム12の筒状部14aの先端に、作業用ツールが装着される手首部11を、T軸を中心に同軸回転するように設ける。
(もっと読む)
ワーク搬送装置
【課題】油飛散なく、高速に平行に直線的にワークを搬送することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置10は、ロボット11と、ロボット11のアーム13の先端部に取り付けられ、ベルト21によって直線駆動されるキャリア29を有する直動機構20と、キャリア29に取り付けられたワーク把持機構23とを備える。
(もっと読む)
基板搬送ロボット
【課題】構造の大型化を防止しつつ、大型重量基板を安全且つ的確に搬送できるロボットを提供する。
【解決手段】本発明のロボット1は、基板が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直方向の回転軸線17周りに回転駆動する回転駆動手段14と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続される。水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
ロボットハンド
【課題】一つのロボットハンドによって、種々の把持対象物の形状や性質に合わせて、異なる向きに安定に把持することができるようにする。
【解決手段】多角形リンク機構18は、少なくとも4個のリンク30a、30b、31a〜31dと、これらのリンクそれぞれに取り付けられて互いに隣接するリンク同士を回動可能に連接するヒンジ32a〜32hと、を備える。リンク同士がヒンジを介して直列に環状に連接されて多角形を形成する。互いに対向するヒンジまたはリンクに直動駆動機構が配置されてそれらのヒンジまたはリンク同士の間隔を拡張収縮させる。直動駆動機構の動作によって互いの相対的向きが変化する少なくとも3個のリンクのそれぞれに指11a〜11dが固定されている。多角形リンク機構の拡張収縮に伴い指の配置位置が可変できる。
(もっと読む)
産業用ロボット
【課題】搬送対象物の重量が変動しても、ハンドに搭載される搬送対象物の傾きを適切に補正することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1は、搬送対象物2が搭載されるハンド3と、搬送対象物2が搭載されたときのハンド3の撓みによる搬送対象物2の傾きを補正する傾き補正機構17とを備えている。傾き補正機構17は、駆動源となる傾き補正用モータと、傾き補正用モータの出力軸に連結される偏心回転部材と、偏心回転部材に下端側が取り付けられるリンク部材と、リンク部材の上端側が取り付けられる取付部材とを備えている。傾き補正機構17は、偏心回転部材の回転に伴ってリンク部材とともに上下動する取付部材によって、支点部36を回動中心として搬送対象物2の傾きを変化させる方向にハンド3を回動させている。
(もっと読む)
1 - 20 / 74
[ Back to top ]