
Fターム[3C007JU03]の内容
マニピュレータ、ロボット (46,145) | 教示装置、操作盤 (625) | 操作盤の構成 (239) | ヒューマンインターフェイス部分 (202) | 表示装置 (123)
Fターム[3C007JU03]に分類される特許
1 - 20 / 123
立体的表示方法
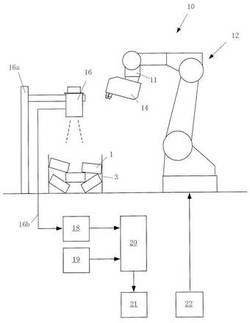
【課題】3次元データについて、特殊な表示装置等を用いることなく、ワークの傾きや重なりを認識することが可能な立体的表示方法を提供する。
【解決手段】ワーク1の3次元データと、3次元データについて所定の視点から視認した場合における2次元データを作成する視覚化装置20と、2次元データの表示が可能である表示装置21と、を準備し、観察者が3次元データを視認する視点と、3次元データを回転させる際の最大回転角である最大角度及び最小回転角である最小角度と、3次元データを回転させる際に中心軸となる回転中心軸とを決定し、回転中心軸を基準として前記3次元データを最小角度と最大角度の間で回転させた場合の複数の回転角度において、視点から3次元データを視認した場合における2次元データを、視覚化装置20によって複数作成し、表示装置21に複数の2次元データを表示する。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置

【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法
【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
操作器の表示制御装置、及び操作器の表示制御方法
【課題】最低限の大きさの表示部しか備えられないであっても、作業者の操作性を向上させることのできる表示制御装置、及び表示制御方法を提供する。
【解決手段】ティーチングペンダント10は、画像を表示する液晶表示器14を備えている。制御部30は、ロボット70の各機能の実行に用いられる各ボタンを液晶表示器14に表示させる。制御部30は、ボタンのうち説明表示が要求されているボタンを主ボタンとして、主ボタンに関連する副ボタンを選択し、主ボタン及び副ボタンの説明を、液晶表示器14のうち主ボタン及び副ボタンが表示されていない部分に表示させる。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
教示データの修正システム
【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
ロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法
【課題】ロボットに動作を教示する際に、ロボットアームの駆動部の可動残量を容易に確認することができるロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法を提供する。
【解決手段】可動範囲が予め設定された駆動部11〜17を備えるロボットアーム18、18aに装着され、作業対象物19に対して作業を行う作業ツール20、20aと、作業ツール20、20aに近接して配置され、可動範囲に対する駆動部11〜17の可動残量を表示する状態呈示装置21と、作業ツール20、20aに対する作業対象物19の位置を検知する位置検出手段25と、駆動部11〜17の可動範囲内で、駆動部11〜17を駆動してロボットアーム18、18aの動作を制御するアーム制御部27とを有し、アーム制御部27は、作業ツール20、20aが作業対象物19に作業を行える位置及び姿勢となったロボットアーム18、18aの姿勢を記憶する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
レーザー加工表示装置及びこれを用いたロボットの教示方法
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
作業用装置
【課題】可動部位を含む作業機において、実際に作業機を動かす前に作業機のどの部位が作動するか、または、どのように作動するかを瞬時に把握した後、同一の操作で速やかに作業機を作動させ、操作性を向上することができる作業用装置を提供する。
【解決手段】操作手段の所定量未満の第1の操作量の操作を行うと、アクチュエータの駆動によって作動する部材に対応付けられた部位を、実際に作動する部材を作動させるときと同一の操作を行うことによって、いずれの部材が作動するか、または、どのように作動するのかを画像表示部220に識別表示し、操作手段の所定量以上の第2の操作量の操作で、前記識別表示した部位に対応する部材を作動させる。
(もっと読む)
ロボットの動作軌跡表示装置
【課題】作業者がロボットの手先の動作軌跡を把握できながら、ロボットの手先の動作軌跡がロボットの動作を妨げ得る物体表面に接近する箇所を把握できるようにする。
【解決手段】ロボットの手先の動作軌跡24については、従来から何ら変更することなく従来通りの表示態様で表示する一方で、物体表面図形22、23については、ロボットの手先の動作軌跡24から一定距離以下である接近点が存在すると、接近点が含まれる領域である接近領域31、32を接近点が含まれない領域と区分して表示する。
(もっと読む)
情報処理装置および情報処理方法
【課題】過去の映像を用いてユーザ操作を支援するための補助的情報を提示する。
【解決手段】情報処理装置100は、任意の位置および向きを示すポインタを含む所定空間内の大域映像を取得する大域映像取得部104と、前記大域映像から前記所定空間内の位置情報を取得する位置情報取得部108と、前記所定空間内で撮像された映像データと、前記映像データの撮像された位置および向きの情報を含む映像情報とを関連付けて記憶している記憶部と、前記ポインタの示す位置および向きに対応する前記映像データを、前記大域映像に重畳して表示画面に表示する映像表示部101と、を備える。
(もっと読む)
ロボット操作装置
【課題】遠隔コミュニケーションが行われるシステムにおいて、簡易な設備でユーザに負担を掛けることなくロボットが自然な身体動作を行うようにすることができるようにする。
【解決手段】ロボット操作装置は、ロボット20が存在する空間を撮像した映像を入力する映像入力部11と、映像入力部11が入力した映像を、ロボット20の頭部等の部位21の志向に対応する画像の部分から遠くなるほど解像度を下げるように加工する映像加工部12と、映像加工部12が加工した映像を表示器15に表示する映像表示部13と、表示器15に表示された映像におけるユーザが指定した位置を向くように部位21を移動させる命令を発行する映像位置指定部14とを備えている。
(もっと読む)
作業機械の操作支援装置
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ハンドガイドシステムの視覚情報支援装置
【課題】作業対象物の狭所へワークを挿入して組付ける場合や、ハンドガイドシステムの操作部と作業対象物の組付け位置が離れている場合でも、人の死角となる狭所での作業を可能にすることができるハンドガイドシステムの視覚情報支援装置を提供する。
【解決手段】手動操作盤によりロボットハンドを操作して作業対象物にワークを組付けるハンドガイドシステムの視覚情報支援装置であって、ロボットハンドのワーク近傍に設けられ作業対象物2の死角領域の画像を取得するカメラ32と、ロボットハンドのワーク近傍に設けられ作業対象物の前記画像領域にスリット状、円弧状、スポット状又はこれらの組合せのレーザ光を照射するレーザ装置34と、手動操作盤近傍に設けられ前記画像を表示するモニタ36とを備える。
(もっと読む)
1 - 20 / 123
[ Back to top ]