
Fターム[3C007KS01]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業対象物の状態 (971)
Fターム[3C007KS01]の下位に属するFターム
Fターム[3C007KS01]に分類される特許
1 - 20 / 27
荷姿認識装置
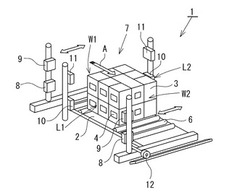
【課題】自動車の組立部品の納入等の物流工程において、パレット上に積載された箱体の種類、形状、寸法及び位置等の荷姿情報を自動的に認識する荷姿認識装置を提供する。
【解決手段】走査装置7の可動ラインカメラ8及び固定ラインカメラ10により、パレット2上に積載された箱体3の第1面〜第4面W1、W2、L1、L2について走査する。走査データから、箱体3に貼り付けられた帳票4の2次元コードを抽出し、2次元コードの位置を表す座標データを生成し、また、抽出した2次元コードに基づきデータベースから箱体3の形状、寸法及び2次元コードの表示位置を含む箱体情報を取得し、2次元コードの位置を表す座標データ及び箱体情報に基づき、パレット2上に積載された箱体3の荷姿情報として、箱体3の各部の座標データを生成する。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置

【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
ロボットハンドの制御装置、制御方法、及び制御用プログラム
【課題】ロボットハンドの指先における物体の接触を確実に検出すると共に物体の物性を推定し、当該物性に適合した危険回避制御を実現する。
【解決手段】第1指関節に対するトルク指令によるトルク値から第1指リンクの重量及び慣性力に抗するためのトルク値を減算した第1指関節接触トルクと、第2指関節に対するトルク指令によるトルク値から第2指関節より先端側の部分の重量及び慣性力に抗するためのトルク値を減算した第2指関節接触トルクとに基づいて、前記第1指リンクの指先と物体との接触を検出する。指先が物体に接触していると判定された場合には、物体のヤング率を推定し、指先が物体と接触する際の制御剛性が物体の剛性を超えないように第1及び第2指関節に対するゲインを調整する。
(もっと読む)
ロボットシステム
【課題】ロボットの作業範囲内まで物品を搬送する搬送車を備えるロボットシステムにおいて、作業者の安全を確保するとともに、ロボットの作業性の低下を抑制する。
【解決手段】ロボットシステムは、ロボットアーム23により作業を行うロボット20と、ロボット20の作業範囲(危険領域A2)内まで組付け部品31を搬送する無人搬送車30とを備える。ロボットシステムは、水平方向に走査してレーザ光を照射し、物体により反射されて戻るレーザ光に基づいて、ロボット20から物体までの距離を検出する領域センサ40a〜40dと、領域センサ40a〜40dにより検出される距離が、危険領域A2の半径(L2/2)よりも短いことを条件として、ロボット20に安全動作を実行させるコントローラと、無人搬送車30に設けられ、領域センサ40a〜40dから無人搬送車30へ照射されたレーザ光を上方へ反射させる反射ベルト32とを備える。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
カラーフィルタ基板修正装置
【課題】カラーフィルタ基板にダメージを与えることなく、更に、アーム同士の干渉によるアームの破損を防いで異物欠陥を除去することを可能とするカラーフィルタ基板修正装置を提供する。
【解決手段】異物検査装置によって検出された異物の所在情報に基づいてカラーフィルタ基板に付着した異物を除去するカラーフィルタ基板修正装置であって、カラーフィルタ基板を載置するステージと、異物を撮像する撮像カメラと複数のマイクロマニピュレータとマイクロマニピュレータに備えられその先端で異物を除去する複数のアームとを備えた異物除去ヘッドと、前記異物除去ヘッドを移動する移動手段と、複数のアームを移動する移動手段と、複数のアームとカラーフィルタ基板の接触を防ぐ干渉防止手段その1と、複数のアーム同士の接触を防ぐ干渉防止手段その2と、を有することを特徴とするカラーフィルタ基板修正装置。
(もっと読む)
物体把持制御方法及び装置
【課題】把持手段が被把持部材の周囲に置かれた他の被把持部材と干渉しないように、周囲がクリアな被把持部材から順番に把持を行う。
【解決手段】S110で被把持部材の形状・位置・姿勢を認識する。
S120で周囲の被把持部材に把持手段が干渉しないような把持手段の姿勢範囲を計算する。S130で把持可能な被把持部材のなかから、前記姿勢範囲が大きいものを選択する。
S140で把持可能な被把持部材が残っているか判定し、残っていればS150に移行し、残っていなければ作業を終了する。
S150で選択された被把持部材を把持するようにマニピュレータを制御する。
(もっと読む)
福祉用ロボット装置のロボットアーム操作方法、ロボットアーム操作プログラム、及び、記録媒体
【課題】物体の把持や器具・装置等の操作が容易に行うことができる福祉用ロボットアームのロボットアーム操作技術を提供する。
【解決手段】本発明によれば、ユーザの手動によってロボットアームを動かして、当該ロボットアームに搭載されたカメラを、当該ロボットアームの動作に関する情報が含まれた画像マークの近傍に配置し(手動モード)、当該カメラにて撮像された画像に画像マークの像が含まれているとき、当該画像マークの像を参照して当該画像マークにより表現された上記情報を読み出し(情報読出工程)、得られた上記情報に基づいて、ロボットアームの動作を自動制御する(ロボットアーム制御工程)とを含んでいる。
(もっと読む)
移動ロボット
【課題】物体を運搬するタスクにおいて、ロボットの駆動状態等によって使用する参照データを切り替えることにより、タスクの実行時間を短縮する。
【解決手段】ロボット10は、画像取得を行うためのカメラユニット1と、カメラユニット本体の位置・向きを変えることができる、首・車輪・脚などの駆動部2と、把持対象物認識を行うために駆動部2を制御するロボット制御部3と、カメラユニット1により取得された画像の処理を行う画像処理部4と画像処理を行うための対象物データを登録・格納する認識対象物データベース部5を有しており、駆動部2の状態等によって、参照データ51として特徴の情報量の多いものと少ないもの等、少なくとも2ケース以上用意されたデータについて、いずれを使用するか決定して切り替えを行い、ロボットが移動中でも効率的に対象物認識を行う。
(もっと読む)
シリンダヘッドの把持装置及びその把持方法
【課題】種類の異なるシリンダヘッドの把持に好適なシリンダヘッドの把持技術を提供することを課題とする
【解決手段】シリンダヘッドの把持装置10は、斜め孔としてのプラグ孔27(図1を参照。)へ挿入されるバーであって、先端31が拡開可能となるように分割されている支持バー32、32と、支持バー32、32を拡開する開閉ロッド33と、この開閉ロッド33を進退させる開閉ロッド駆動源34と、支持部材35と、支持バー32、32を開動作させてシリンダヘッド15把持し、シリンダヘッド15を移動させ、シリンダヘッド15を押さえ部材24で押さえ、開閉ロッド33を後退させて支持バー32、32を閉じてシリンダヘッド15から抜き取る、一連の制御を実施する制御部21(図1を参照。)と、からなる
【効果】構成部品が少ないので、小型で簡単な構造にすることができる。この結果、ロボットへの負荷を小さくすることもできる。
(もっと読む)
オブジェクト探索装置及び方法
【課題】散在する複数のオブジェクトを容易に探索することができるオブジェクト探索装置及び方法を提供する。
【解決手段】ICタグから、オブジェクトの識別子、階層レベル、該オブジェクトを検出するための検出方法、及び該オブジェクト情報を取得する取得手段で、目的オブジェクトのオブジェクト情報を含むオブジェクト情報群を取得し、各オブジェクト情報の検出方法及び操作方法を用いて、階層レベルの高い順に、該目的オブジェクトよりも階層レベルの高いオブジェクト、及び該オブジェクトが有するオブジェクトを順次検出することにより、該目的オブジェクトを検出する。
(もっと読む)
ロボットハンド
【課題】簡単な構成でありながら物体の硬さを検知することができる小型のロボットハンドを提供する。
【解決手段】第1の指部F1と第2の指部F2で物体Sを挟んだ状態で、第1の超音波アクチュエータU1の振動体3により超音波を発生し、第1の超音波アクチュエータU1の振動体3から固定子5及び回転子6、第1の指部F1、物体S、第2の指部F2、第2の超音波アクチュエータU2の回転子6及び固定子5を介して振動体3へと超音波が至る所要時間を計測する。指部F1及びF2の位置から物体Sの厚さDを算出して超音波の伝搬経路の長さを算出し、計測された所要時間と算出された超音波の伝搬経路の長さとに基づいて物体S中の超音波の伝搬速度を算出し、この伝搬速度V1に基づいて物体Sの硬さを検知する。
(もっと読む)
複数のウェハを取り扱う能力を備えた受渡し機構
一体化されたロボット機構は、搬送機器を改善し、対象物移動を、アライメント又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、複数の加工物を移動させるための多重エンドエフェクタと、1つの加工物を移動させるための単一エンドエフェクタと、アライメント能力を提供するためのロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有することができる。本発明のロボットアセンブリは、ソータ又はストッカ機器において、処理機器において、及び受渡しシステムにおいて使用されることができる。 (もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
ロボットの教示装置及び教示方法
【課題】実機を用いてロボットの進入禁止領域を設定する際の画像データの処理を比較的簡単に済ませると共に、オペレータの操作も容易に済ませる。
【解決手段】カメラのワークW全体が視野内に収まる第1の姿勢で第1の画像I1を撮像し、カメラをそれとは角度90度程度異なる第2姿勢に移動させ、第2の画像I2を撮像する。表示装置8の画面に第1の画像I1を表示させ、オペレータはワークWを内包した楕円形の第1の閉領域A1を指定する。パソコン本体は、指定された第1の閉領A1を第1の方向に延長した第1の投射空間P1を作業空間内に仮想的に算出する。表示装置8の画面に第2の画像I2及び第1の投射空間P1を投影した領域を表示させ、オペレータは、ワークWを内包した部分を切取るように2本の直線L1,L2を指定する。パソコン本体は、直線L1、L2を延長した2つの平面で第1の投射空間P1を切断した仮想円柱Cを算出し、ロボットの進入禁止領域として設定する。
(もっと読む)
超音波検査システム
【課題】正確なアライメントを必要とせず、検査物体の硬さや重さに関する情報を取得することができる超音波検査システムを供給する。
【解決手段】超音波送受波器1から広帯域変調波を検査対象物体11に送波し、検査対象物体11にラム波を励起する、ラム波3は円筒形状の検査対象物体11を円周方向に周回し、超音波受波器2によってラム波3周回周期に同期した周期性をもった受信信号が獲られる。これらの周期性を解析することによって、ラム波の伝搬速度が推定され、検査対象物体11の硬さ、重さなどが推定される。
(もっと読む)
搬送ロボット及び搬送プログラム
【課題】物体の重さに応じて搬送する物体の持ち方を変更することが可能な搬送ロボットを提供する。
【解決手段】搬送する物体8を持ち上げる複数の腕部12と、腕部12が持ち上げた物体を搬送する搬送手段14と、物体の搬送条件情報を取得する搬送条件情報取得手段16と、取得した物体8の搬送情報に応じて腕部12を用いた物体8の持上方法、又は持ち上げに用いる腕部12を選択する持上方法選択手段18と、持上方法選択手段18が選択した持上方法による物体8の持ち上げを腕部12に指令し、持ち上げた物体8の搬送を搬送手段14に指令する制御手段900と備えた。
(もっと読む)
コミュニケーションロボットシステム
【構成】コミュニケーションロボットシステム200は人の視線を検出する視線計測装置14を含む。コミュニケーションロボット10は人の視線に応じてその視線を動かす。たとえば、人に見られているとき当該人の目を見詰め返し、人に見られていないとき当該人と同じ方向に目を向ける。なお、ロボット10はたとえば人の眼に照射された赤外線の角膜反射像を赤外線カメラ74で検出し当該人の眼の位置を検出する。または、人に見られているとき当該人の眼の位置から視線をそらし、人に見られていないとき当該人の眼を盗み見する。あるいは、見詰め合っている時間が閾値を超えたとき人の眼から視線をそらし、見詰め合っている時間が閾値未満のとき人の眼を見詰め返したり人の視線を追ったりする。
【効果】人と視線のやりとりを行うことができ、人の眼を見ていることや見ていないことを人に強く実感させることができる。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
片付けロボット
【課題】片付けロボットが、人の指示に応じて、又は、自発的に、任意の位置で、任意の日常用物品を預かり、任意の空きスペースに片付けることを可能とする。
【解決手段】人の状態計測部51からは、人の位置、人の名前、人の音声が待機位置決定部54に入力される。また、片付けロボット状態計測部52からは、片付けロボットの位置が待機位置決定部54に入力される。また、環境地図53からは、片付けロボットの走行経路が待機位置決定部54に入力される。これらの入力に基づいて、待機位置決定部54は待機位置を決定し、片付けロボット自らその場所に移動する。指示確認部55は、人の音声命令を解釈して人からの作業指示を確認し、片付ける命令(片付指示)、又は取ってくる命令(返却指示)を実行部56に入力する。
(もっと読む)
1 - 20 / 27
[ Back to top ]