
Fターム[3C007KS16]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 位置 (409)
Fターム[3C007KS16]の下位に属するFターム
Fターム[3C007KS16]に分類される特許
1 - 20 / 95
ロボットの制御方法およびロボットの制御装置
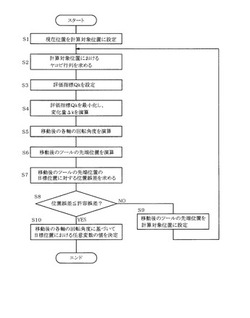
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法

【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
力制御装置
【課題】力覚センサの低コスト化を実現しながら、ロボットの先端部に作用する外力を高精度に算出すること。
【解決手段】モータにより駆動されるロボット3と、前記ロボット3の先端部が指令位置に追従するように前記モータを駆動する電流指令を生成するロボット制御手段2と、前記ロボット3の先端部の6個の動作方向のうち、x軸方向、y軸方向、z軸方向の3個の動作方向の夫々にかかる外力を検出する力覚センサ31と、前記力覚センサ31の検出値、前記モータの位置、および前記電流指令に基づいて、前記ロボットの先端部のn個の動作方向のうちの少なくとも前記力覚センサ31が外力を非検出とする3つの軸の回転方向の外力算出に必要となる摩擦係数を夫々同定し、当該同定した摩擦係数に基づいて当該3つの軸の回転方向にかかるモーメントの推定値を算出する力推定オブザーバ4と、を備える。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
ロボット
【課題】 ケース部材の開口縁部とシャッタとの隙間からケース部材の内部に塵埃や異物が浸入することを防止できるロボットを提供すること。
【解決手段】 軸方向に沿う一面が開口したケース部材10と、ケース部材10の軸方向に移動可能な状態でケース部材10に取り付けられた可動部材20と、可動部材20を移動させる駆動装置40と、ケース部材10の開口15を塞ぎ可動部材20に位置する部分が開口15の縁部から離間されるシャッタ50とを備えたロボットAを構成した。そして、可動部材20の移動方向の両端に、シャッタ50の外面と開口15の縁部とに接触するワイパ34を着脱可能に設けた。ワイパ34の可動部材20への取り付けを、可動部材20に係合部36を設けるとともに、ワイパ34に被係合部37を設けて、ワイパ34を係合部36に対してスライドさせることにより行った。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
カメラ付きロボット
【課題】 ロボットアームに搭載されるカメラのシャッターチャンスを最適化し、組立作業効率を向上させる。
【解決手段】 フィンガー4上の点Fと、カメラ1の位置基準であるアライメントマーク3aに対する位置をカメラ1によって撮像し、画像処理によってカメラ1の位置を計測する。カメラ1の位置が予め設定された位置閾値以下で、かつ、カメラ1に搭載された速度センサ3によって計測されるカメラ1の移動速度が予め設定された速度閾値以下である時にカメラ1のシャッターを切る。あるいは更に、速度センサ3の微分値によって計測されるカメラ1の移動加速度が予め設定された加速度閾値以下である時と論理積を取ってシャッター切る。これによって、ワーク12を探索するための画像のブレを防ぎ、位置誤差を低減するとともに、シャッターを早く切ることで作業効率を向上させる。
(もっと読む)
ロボットシステム及びロボットシステムのキャリブレーション方法
【課題】キャリブレーションを容易且つ高精度に行なう。
【解決手段】キャリブレーション冶具5をハンド2bに固定し、ハンド2bを移動させて、キャリブレーション冶具5上の特徴点を所定の位置に移動させる。このときのカメラ座標系における特徴点の位置座標から、カメラ座標系における、キャリブレーション冶具5の座標系である冶具座標系の原点の位置及び姿勢を検出する。冶具座標系はハンド2bを基準とするアーム先端座標系と一致するため、カメラ座標系における特徴点と、アーム先端座標系との相対関係を検出することができ、すなわちキャリブレーション冶具5とハンド2bとの相対関係を検出することができる。このキャリブレーション冶具5とハンド2bとの相対関係を用いて、カメラ座標系とロボット座標系との剛体変換行列を求める。
(もっと読む)
細径アクチュエータ
【課題】本発明の目的は、偏荷重による細径アクチュエータの屈曲を防止し、高精度な制御が要求される細径の医療用または工業用マニピュレータを実現するための細径アクチュエータを提供することにある。
【解決手段】本発明は、第1および第2のセンサ部により構成された折り返し構造を有する変位センサを具備し、第1のセンサ部がアクチュエータの中心軸に対して平行に配置され、第2のセンサ部が第1のセンサ部の各位置から前記中心軸に対して垂直に交わる線分上で前記中心軸に対して軸対称となるように配置されることにより、偏荷重の発生を抑制したことを特徴とする、細径アクチュエータを提供する。
(もっと読む)
産業用ロボットの安全制御装置
【課題】
産業用ロボットと作業者とが協調して協同作業を行うに際して、ロボットの不要な停止を避けながらも、ロボットと作業者とが接触しないようにする。
【解決手段】
本発明に係る安全制御装置18は、予め教示された作業プログラムに従って作業者4と協同して作業を行う人間協同型産業用ロボット3の安全制御装置18である。そして、作業者4及びロボット3それぞれの現在位置及び移動速度を取得し、作業者4の現在位置及び移動速度に基づいて作業者4の将来位置を予測した作業者基準位置を算出するとともに、ロボット3の現在位置及び移動速度に基づいてロボット3の将来位置を予測したロボット基準位置を算出し、作業者基準位置及びロボット基準位置に基づいてロボット3と作業者4との接触可能性を判断し、接触可能性の判断結果に応じた処理を行う。
(もっと読む)
ロボット及びロボットシステム
【課題】可動部の場所を短時間に検出できるロボットを提供する。
【解決手段】可動部を有するロボットであって、可動部に配置され超音波信号を発信する複数のロボット用超音波タグ13と、ロボット用超音波タグ13が発信した超音波信号を受信する3個以上のロボット用超音波受信装置19と、複数のロボット用超音波受信装置19が受信する超音波信号の到達時間を用いてロボット用超音波タグ13の場所を検出する発信位置演算部と、を有し、発信位置演算部は検出した複数のロボット用超音波タグにおける場所の情報から前記ロボットの姿勢を検出する。
(もっと読む)
パラレルリンクステージの制御方法およびパラレルリンクステージ
【課題】パラレルリンクステージにおいて、必要以上に大きな信号線の引き回しスペースを必要とすることなく、信号線の摩擦による損傷を確実に防止する技術を提供する。
【解決手段】エンドエフェクタ1とベース6との間に設けられたパラレルリンク機構pのサーボモータ5a〜サーボモータ5fの各々を、サーボドライバ群20にて個別に閉ループ制御することでエンドエフェクタ1の変位を制御するパラレルリンクステージ7において、複数のサーボモータ5a〜サーボモータ5fに対応して設けられたスレーブモジュール8a〜スレーブモジュール8fと、サーボドライバ群20に接続されたマスタモジュール23との間をシリアル通信ケーブル10で接続し、サーボモータ5a〜サーボモータ5fからサーボドライバ群20へのモータ位置情報等のフィードバックをシリアル通信で行うようにした。
(もっと読む)
制御システム、制御方法およびプログラム
【課題】容易かつ短期間でロボットを制御する制御システムの誤差を解消し、ロボットを高い精度で制御すること。
【解決手段】制御システムは、ワークテーブルにマーキングするマーキング装置をロボットハンドとともに移動させ、ロボットハンドの位置を示すマークをワークテーブルにマーキングさせるマーキング制御部と、マークがマーキングされているワークテーブルの画像を撮像装置に撮像させる撮像制御部と、複数のマークのそれぞれがマーキングされたときにロボットハンドの位置を制御するために用いられていた複数の制御値、および画像におけるマークの位置に基づいて、撮像装置が撮像する画像内の位置とロボットハンドの制御値との対応関係を算出する対応関係算出部とを備える。
(もっと読む)
干渉チェック制御装置および干渉チェック制御方法
【課題】制動動作中におけるロボットの構成部分同士の干渉の有無を高精度に判定する。
【解決手段】動作領域に重複部分を有するロボット同士の干渉チェック制御装置であって、速度・位置記憶手段910と、干渉判定領域の閾値をあらかじめ記憶する干渉判定用閾値記憶手段918と、速度・位置データに基づいて制動開始から停止までに必要な時間を計算する制動時間計算手段911と、制動開始から制動完了までの各構成部分間の最近接距離の履歴を、接近する各構成部分の速度に基づいて推定するロボット間距離推定手段916と、各構成部分間の最近接距離の履歴と干渉判定領域の閾値とを比較し、制動期間中の干渉の有無を判定する干渉判定手段917と、干渉判定結果に応じて各ロボットに対する移動指令値を作り出すとともに、ロボットの速度・位置データを速度・位置記憶手段に記憶させる指令値生成手段919とを備える。
(もっと読む)
電動アクチュエータ
【課題】終点に移動した移動体を被押し当て体に押し当てることができ、被押し当て体のクランプ又は被圧入体への圧入を可能にした電動アクチュエータを提供する。
【解決手段】電動アクチュエータ11は、スライダ13の位置情報を検出するエンコーダ20と、スライダ13の速度調節器42a,42bと、スライダ13の移動距離を学習する学習部と、学習部を動作させるための操作釦44a,44bと、電動モータMに駆動信号を出力する制御部30と、スライダ13の推力調節器43とを有する。電動アクチュエータ11の制御部30は、スライダ13を終点に位置させた後、推力調節器43の操作に応じて設定された推力に基づき電動モータMに駆動信号を出力して、スライダ13に推力を発生させてスライダ13をワークに押し当てる。その結果、挟持体と電動アクチュエータ11のスライダ13とでワークをクランプすることができる。
(もっと読む)
ロボット暴走判定方法およびロボット制御装置
【課題】
ロボットの各関節の動作範囲データを事前に計算・記憶させる必要が無く、ロボットの動作範囲や動作軌道を時々刻々に変化しても、また、急に未知の負荷を加えても、ロボット関節とロボット全体の暴走を正確で確実に防止できるロボット制御装置を提供すること。
【解決手段】
ロボットの暴走判定方法において、一定周期毎に、関節位置と関節指令位置に基づきロボットの関節へトルク指令を出力することで関節位置を制御し、前回の周期におけるトルク指令と関節位置を記憶し、前回の周期におけるトルク指令と関節位置を用い、現在の周期の関節位置推定値を含む各種状態推定値を外乱オブザーバで演算し、関節位置推定値と今回の周期の関節位置との差の絶対値が、所定の位置誤差閾値より大きい場合に関節を駆動するアクチュエータが暴走していると判定し、前記各関節の暴走判定結果を用いて、ロボットの暴走を判定する。
(もっと読む)
脚式歩行ロボットの安定化制御装置
【課題】 前後方向と左右方向の安定化制御が互いに影響し合うことなく,足裏の小さいロボットでも前後左右からの外乱に対して高い安定性で動作することができる脚式歩行ロボットの安定化制御器を提供する。
【解決手段】 足平推力を関節モータトルクに変換する推力変換器と,エンコーダ情報から足平相対位置情報を算出する順キネマティクス演算器を備えることにより足平推力を操作可能とする。上体傾斜角,上体傾斜角速度,重心位置偏差,重心速度偏差の4つを状態変数とし,支持脚足平推力補正量を操作量とした状態方程式でロボットをモデル化する。前後方向,左右方向それぞれについて,この状態方程式を用いてレギュレータを構成し,計8つの状態変数全てを0に収束させる。
(もっと読む)
位置・力再現方法および位置・力再現装置
【課題】接触と非接触を繰り返す動作をデータとして保存し、再現することができる位置・力再現方法および位置・力再現装置を提供する。
【解決手段】時系列な位置情報と力の接触情報を取得する手段であるアクチュエータ201と、取得した位置情報と力の接触情報を解析処理する制御部203と、解析処理結果を保存する記憶手段204とを備え、保存した解析処理結果により前記位置情報と力の接触情報を再現する。これにより接触時と非接触時の位置・力の双方の再現を実現でき、接触−非接触を繰り返すような動作を保存・再現させることができ、操作者Aの位置と力の双方を再現することができ、時間と空間を越えて操作者Aの動作を再現することができる。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】距離センサの故障を検知して、安定して歩行が可能な脚式ロボット、及びその制御方法を提供する。
【解決手段】本発明に係る脚式ロボットは、胴体10と、脚部20と、足平部26と、足平部26の足裏と路面との距離を検出する距離検出部16と、歩容データに基づいて脚部20の関節を駆動制御する制御部30と、を備え、制御部30は、距離検出部16の検出結果が基準範囲内に含まれない場合に、距離検出部16の故障を検知する故障検知部66と、故障していない正常な距離検出部16の検出結果に基づいて、歩容データを修正する歩容データ修正部と、を備える
(もっと読む)
脚式ロボット、及びその制御方法
【課題】外乱に対しても、爪先関節を駆動させながら安定して歩行することができる脚式ロボット、及びその制御方法を提供する。
【解決手段】本発明に係る脚式ロボットは胴体10と、足平部26は、爪先部26aと爪先関節27を介して連結された踵部26bとから構成され、歩容データは、爪先部26aの目標位置姿勢と爪先関節27の目標角度とを含み、制御部30は、距離検出部16の検出結果に基づいて、爪先部26aの目標位置姿勢を補正する爪先部補正量と、爪先関節27の目標角度を補正する爪先関節補正量とを計算する爪先補正量計算部と、爪先補正量計算部により計算された爪先部補正量と爪先関節補正量とに基づいて、歩容データを修正する歩容データ修正部と、を備え、爪先補正量計算部は、踵部26bが離床している間、爪先関節補正量を所定の値に保持する。
(もっと読む)
1 - 20 / 95
[ Back to top ]