
Fターム[3C007MS16]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 誤操作への対応 (26)
Fターム[3C007MS16]に分類される特許
1 - 20 / 26
真空ピンセットおよび真空吸着方法
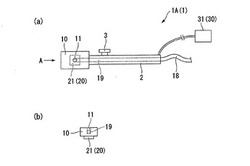
【課題】手作業による操作ミスがあったとしても被処理体の吸着ミスを防止し、確実に吸着・脱着動作を行うことが可能な真空ピンセットを提供する。
【解決手段】本発明の真空ピンセットは、長尺状の本体2と、前記本体の一端部に設けられ、平板状の被処理体を吸着し保持する第一機能部10、および、前記被処理体とは異なる対象物の有無を識別する第二機能部20と、を少なくとも備えた真空ピンセット1A(1)であって、前記第二機能部における前記対象物の有無の識別結果に基づき、前記第一機能部における前記被処理体の吸着条件を切り替える制御手段30を有すること、を特徴とする。
(もっと読む)
ロボット制御装置

【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
ロボット
【課題】複数のモータに対して複数のドライバモジュールを用意する場合、誤配線を防止すると共に冷却対策が容易となり、生産効率を向上できるロボットを提供する。
【解決手段】コントローラ3に第1〜第3ドライバモジュール8〜10を備え、ドライバモジュール8〜10には夫々、第1軸及び第4軸,第2軸及び第3軸,第5軸及び第6軸のモータを駆動するドライバICを搭載する。また、ケーブル4がコントローラ3に接続される側は、ドライバモジュール8〜10に応じた分岐部4B(1)〜4B(3)の先にそれぞれコネクタ20〜22を備え、夫々異なる2端子が短絡された識別用端子として定められ、コントローラ3側のコネクタ23〜25はコネクタ20〜22の何れもが接続可能な共通の形状である。
(もっと読む)
ロボット制御システム
【課題】
操作者がコントローラに設けられた第1接続確認操作手段を操作すると、コントローラの第1表示手段と、可搬式操作部に設けられた第2表示手段が同時に第1接続確認操作手段が操作される前の第1表示状態から第2表示状態に変化するため、操作者が把持している乾式操作部とコントローラの接続関係の誤認識を確実に防止できるロボット制御システムを提供する。
【解決手段】
コントローラ20AとTP10と通信接続が完了した後、コントローラ20Aが教示モードに設定されている際に、操作者がコントローラ20Aに設けられた運転準備ボタン58aを押すと、運転準備ボタン58aの運転準備ボタン表示灯63と、TP10の非常停止ボタン表示灯141aが同時に消灯から点滅パターンに変わるので、操作者が把持しているTP10とコントローラ20Aの接続関係の誤認識を確実に防止できる。
(もっと読む)
ロボット制御命令入力装置
【課題】反射的な操作が制限され、表示手段の大きさに関わらず入力される動作命令の確認が促されるロボット制御命令入力装置を提供する。
【解決手段】確認項目53への回答として選択項目54および選択項目55が用意されているとき、一方の選択項目55を選択しても、この選択項目55を決定するためのOKボタン62はすぐに操作することができない。すなわち、選択項目55を選択するタッチ操作をしてから遅延時間が経過するまで、操作者はOKボタン62を操作しても入力が受け付けられない。そのため、操作者は、反射的な一連の操作ができず、表示部21の表示内容に注意を向けやすくなる。その結果、表示部21の表示内容への注意の喚起が図られ、また遅延時間に相当する時間を付与することにより、例えば操作者が熟練者であっても、選択した選択項目55の確認が促される。
(もっと読む)
ロボット入力情報入力装置
【課題】操作者が思い込みで誤った入力情報を入力した場合であっても、誤った入力情報を入力したことを操作者に認識させる。
【解決手段】操作者が操作可能なチィーチングペンダントにおいて、操作者がロボット起動に必要な入力情報を入力する操作間隔が規定間隔未満であり、操作者が起動モード選択画面53に表示されている内容を十分に確認することなく入力操作を行ったと判定した場合にだけ、最終確認画面54を表示させる前に挿入画面55を挿入表示させる。操作者がチィーチングペンダントを操作するリズムを積極的に崩すことができ、それまでに自らが行ってきた入力操作を顧みる時間を操作者に与えることができ、自らが入力した入力情報を操作者に十分に確認させることができる。
(もっと読む)
ロボット停止装置及び方法
【課題】非常停止の必要性を的確に検出し、ロボットの誤停止を防止する。
【解決手段】自律的に動作するロボットを停止させるロボット停止装置1であって、音声情報を検出する音声検出手段2と、物理的操作を受け付ける操作手段3と、音声検出手段2から出力される音声検出信号15が所定の音声的条件18を満たし、且つ操作手段3から出力される操作検出信号16が所定の操作的条件19を満たす場合に、停止信号17を出力する制御手段4と、停止信号17が出力された場合に、ロボットの動作を停止させる停止手段5とを備える
(もっと読む)
ロボットのアーム回動範囲変更制御装置
【課題】ソフト制御上の可動制御範囲区域に対して物理ストッパの可動範囲区域を間違えて設定してしまうことを抑制でき、さらに、複数の可動制御範囲区域をアームの所定可動範囲内に確実に設定できるようにする。
【解決手段】ユーザーが複数の可動制御範囲区域のいずれかを設定すると、制御部9は、該可動制御範囲区域に対応する前記可動範囲区域において設定された2つの物理ストッパ中間角度値Kc[deg]を求め、物理被ストッパの現在位置の角度値をX[deg]とし、アームの移動角度をQ[deg]としたとき、QをQ=Kc−Xなる式で求め、Q>0のときには、アームを、他方の回転方向へ前記Qの角度だけ回転させ、Q<0のときには、アームを、一方の回転方向へ前記Qの角度だけ回転させることによりストッパ位置の示唆を行う。
(もっと読む)
自律動作型ロボット
【課題】ロボットの一部である動作部を検出した場合に、検出した動作部を障害物と誤認せずに自律動作を継続可能にするような自律動作型ロボットを提供すること。
【解決手段】外部の環境を観察して得られた情報に基づき検出信号を出力するセンサ部と、所定動作を行う動作部と、決定した動作を動作部行わせる制御部を備えた自律動作型ロボットにおいて、制御部が、動作部の動作を決定するとともに、センサ部からの検出信号に基づき決定動作を変更する動作決定部と、予め動作部に所定動作を行わせ、駆動開始時刻および駆動終了時刻の間にセンサ部からの検出信号の変化に基づき検出予測データを作成する検出予測データ作成部を備えており、動作決定部において検出予測データ作成部により作成された検出予測データに基づきセンサ部から出力された検出信号を無効にするか否かを判断する判断部をさらに設けるようにした。
(もっと読む)
成形品取出機
【課題】 ティーチング等の手動操作が行いやすいコントローラを備え、しかも、成形品取出機本体の制御部を複雑化しなくてすむ成形品取出機を提供する。
【解決手段】 成形品取出機1は、成形品取出機本体3と主コントローラ5と副コントローラ7を備えている。副コントローラ7は、主コントローラ5の下位に存在しており、副コントローラ7からの設定は主コントローラ5を経由して伝達される。作業者は、使用用途に応じて主コントローラ5又は副コントローラのいずれを操作するかを決定することができる。
(もっと読む)
マニピュレータ
【課題】アクチュエータ部と作業部とを装着する際に、作業部の個体情報の誤認識を防止することができるマニピュレータを提供する。
【解決手段】マニピュレータ10は、アクチュエータブロック30と、アクチュエータブロック30に対して着脱自在な作業部16と、作業部16の動作を制御するコントローラ514とを備える。前記アクチュエータブロック30には係合凹部41a〜41cが設けられ、前記作業部16には係合凸部51a〜51cが設けられ、係合凸部51a〜51cは作業部16の種類に応じて異なる角度に設定されると共に、係合凹部41a〜41cと係合凸部51a〜51cとは、互いに所定の係合角度に設定されている場合にのみ係合可能に構成される。
(もっと読む)
マニピュレータ及びマニピュレータシステム
【課題】キャピラリを所定位置にセッティングするときに操作者による誤動作を防止可能なマニピュレータを提供する。
【解決手段】このマニピュレータは、微小対象物を操作するためのキャピラリを圧電素子92により微動駆動する微動機構と、キャピラリを3軸方向に駆動する駆動手段と、圧電素子が発生する電圧を検知する電圧検知手段97と、電圧検知手段による電圧検知に基づいてキャピラリの他部分への接触状態を監視する監視手段45,98と、を備える。
(もっと読む)
走行装置
【課題】設置期間が短く、コンパクト、安価、且つ安全な、駆動用サーボモータ搭載走行装置を提供する。
【解決手段】本発明の走行装置が備える走行台は、複数の走行台ユニット20で構成され、各走行台ユニットのレール21及びサーキュラーピッチ歯を備える駆動ラック22は、基台27の一方の端部27cから突出して設置される。走行台ユニット同士の連結は、レール及び駆動ラックを他の走行台ユニットの基台の他方の端部27dに架け渡して行う。駆動ラックは、正確にピッチ合せをして敷設した後、駆動ラック位置決め機構30(31、32)を用いて固定する。また、走行台を水平に保つジャッキ23は、レールの垂直下の梁部材24に設けられる。
(もっと読む)
ロボット安全監視装置
【課題】ロボットの工具交換時における安全性を向上させる。
【解決手段】ロボット制御装置から出力されロボットの各軸を駆動するモータの動作変位量に関する指令値を入力する動作変位量入力する。動作変位量の変化に伴って運動するロボットの教示基準点の実空間上における位置座標を、指令値に基づいて算出する。ロボット制御装置から出力され、ロボット制御装置が管理上使用する現在の工具を示す第1工具識別情報を入力する。ロボットに取り付けられた工具を検出してその工具を識別するための第2工具識別情報を入力する。第1工具識別情報と第2工具識別情報とが不一致か否かを判定する。初めて不一致が検出された時刻における教示基準点の位置座標を基準座標として、この基準座標を内部に含む領域を所定領域とする。不一致と判断されている期間において、教示基準点の位置座標が、所定領域の外部に存在するようになった時には、ロボットを安全な状態にするための非常停止信号が出力される。
(もっと読む)
遠隔操作ロボット装置
【解決手段】 遠隔操作ロボット装置1は、操作者が所持して動かす操作手段2と、操作手段2の位置と姿勢を検出するセンサ3と、このセンサ3による検出結果を基にしてロボットハンド5aを操作手段2の動きに追従させる制御手段4を備えている。
ロボットハンド5aには、赤と緑の表示ランプ5G、5Rが設けられており、操作者により操作手段2の制御スイッチ2Aが押されると緑の表示ランプ5Gが点灯される。その後、操作者が操作手段2を速く動かしすぎた場合等のオペレータ異常が生じると赤の表示ランプ5Rが点灯される。
【効果】 操作者が操作手段2を動かす際に、オペレータ異常が生じたことを容易に認識できる。
(もっと読む)
マニピュレータシステム及び制御装置
【課題】作業部における動作をする部分が規定の原点位置からずれた状態で作業部が取り外されることを認識して操作者に注意喚起をする。
【解決手段】マニピュレータ10は、操作部14と、交換自在な作業部15とを有する。作業部15は、制御装置514aの作用下に動作する先端動作部12と、固体識別用のIDを保持するID保持部104とを備える。制御装置514aは、ID保持部104のIDを認識するとともに、作業部15が操作部14に接続されているか否かを判断するID認識部120と、先端動作部12が規定の原点位置又は非原点位置であることを認識する原点認識部122と、先端動作部12が非原点位置であると判断される場合で、先端動作部12が操作部14から外されたと判断されるときに取外警告を発する警告部124とを有する。
(もっと読む)
ロボットシステム
【課題】
マニピュレータを軸操作キーを操作して動作させる時に、誤って操作してマニピュレータを周辺機器に干渉又は衝突することを避けることができるロボットシステムを提供する。
【解決手段】
教示装置の軸操作キーを2段階の操作ポジションを備えることにより、軸操作キーの1段階目にて、マニピュレータの動作軸に備えられた、表示器により、動作軸、動作方向、動作座標を可視化させ、軸操作キーの2段階目で実際にマニピュレータが動作する。また、イネーブルスイッチによりマニピュレータの動作禁止状態での軸操作キー操作で表示器により、動作軸、動作方向、動作座標を可視化させ、マニピュレータの動作する前に操作者が煩雑な操作がなく確認することが出来る。
(もっと読む)
コントローラ、ロボット、教示装置、機械制御システムおよび無線通信チャネル接続方法
【課題】無線方式を採用するコントローラ、教示装置間の通信システムにおいて、無線通信を開始する前に必要なパラメータを重複設定や誤設定のないように有線を使っていた。【解決手段】コントローラ、教示装置間で設定情報、モニタ情報を交換するための第1無線通信手段に加え、設定、モニタの対象となるコントローラ10と、オペレータが携帯する教示装置20間でのみ通信可能な第2無線通信手段を備える。まず、前記コントローラに備えた前記第2無線通信手段11の起動スイッチ15をオペレータが押して、第2無線通信手段によって、第1無線通信手段の設定パラメータを授受するための通信を行い、その後、第1無線通信手段による通信を開始するという手順で処理する。 (もっと読む)
ロボット制御装置の制御方法及びロボット制御装置
【課題】ロボット本体を立ち上げる毎に、ロボット本体とコントローラとの誤接続を確実に防止することができるロボット制御装置の制御方法及びロボット制御装置を提供する。
【解決手段】コントローラ10が起動する毎に、ロボット本体20から各駆動モータ21a〜21dの型式情報を読み込み、機種設定処理時に下位CPU15に記憶された駆動モータ21a〜21dの型式情報と比較するようにした。そして、機種設定処理時に下位CPU15に記憶された駆動モータ21a〜21dの型式情報と一致した場合のみ、動作プログラムが起動されるようにした。
(もっと読む)
ロボット制御装置
【課題】作業者が意図しなくても、非常停止回路の機能の点検が自動的に行われるようにする。
【解決手段】ロボット13を駆動する駆動モータ43に電力が供給されているときにロボット13の動作領域内に作業者が近づくことを禁止する自動運転モードと、駆動モータ43に電力が供給されているときでも動作領域内に作業者が近づくことを許容する第2の運転モードとを切り換えるための運転モード切換スイッチ31と、駆動モータ43への電力供給路49の遮断と接続とを切り換える電磁接触器51とを備え、電磁接触器51による電力供給路49の遮断によりロボット13を非常停止させることができるロボット制御装置に、さらに非常停止制御手段を設ける。非常停止制御手段は、運転モードの切り換えを検出すると、電磁接触器51に遮断指令を発し、電力供給路49が遮断されたか否かを自動的に確認する。
(もっと読む)
1 - 20 / 26
[ Back to top ]