
Fターム[3C007MT09]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 複数パターン、変化への対応 (220) | ワークの状態への対応 (119)
Fターム[3C007MT09]の下位に属するFターム
複数種類のワークへの対応 (45)
Fターム[3C007MT09]に分類される特許
1 - 20 / 74
棒状部材の搬送装置
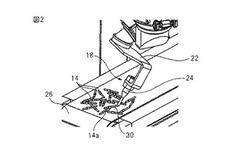
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
立体的表示方法

【課題】3次元データについて、特殊な表示装置等を用いることなく、ワークの傾きや重なりを認識することが可能な立体的表示方法を提供する。
【解決手段】ワーク1の3次元データと、3次元データについて所定の視点から視認した場合における2次元データを作成する視覚化装置20と、2次元データの表示が可能である表示装置21と、を準備し、観察者が3次元データを視認する視点と、3次元データを回転させる際の最大回転角である最大角度及び最小回転角である最小角度と、3次元データを回転させる際に中心軸となる回転中心軸とを決定し、回転中心軸を基準として前記3次元データを最小角度と最大角度の間で回転させた場合の複数の回転角度において、視点から3次元データを視認した場合における2次元データを、視覚化装置20によって複数作成し、表示装置21に複数の2次元データを表示する。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
容器搬送装置
【課題】容器搬送装置において、容器に貼付されたラベル等の一部が剥がれてその剥がれ部分がマニピュレータに付着している場合や容器の外側に粘着剤が残留しておりそれによって容器側面がマニピュレータに付着している場合に、マニピュレータを開動作させても容器がマニピュレータから離れないことがあった。
【解決手段】マニピュレータ20Aを下降させて、それを開動作させて容器を離した後、そのままマニピュレータ20Aを再下降させる。これにより付着状態が強制的に解消される。その後、マニピュレータ20Aが上方へ引き上げられる。その途中でマニピュレータ20Aの閉動作が実行され、容器26Aの不存在が確認される。マニピュレータ20Aの開動作の開始後に開動作完了を待たずに再下降を開始させてもよい。
(もっと読む)
ロボットハンドの制御装置、制御方法、及び制御用プログラム
【課題】ロボットハンドの指先における物体の接触を確実に検出すると共に物体の物性を推定し、当該物性に適合した危険回避制御を実現する。
【解決手段】第1指関節に対するトルク指令によるトルク値から第1指リンクの重量及び慣性力に抗するためのトルク値を減算した第1指関節接触トルクと、第2指関節に対するトルク指令によるトルク値から第2指関節より先端側の部分の重量及び慣性力に抗するためのトルク値を減算した第2指関節接触トルクとに基づいて、前記第1指リンクの指先と物体との接触を検出する。指先が物体に接触していると判定された場合には、物体のヤング率を推定し、指先が物体と接触する際の制御剛性が物体の剛性を超えないように第1及び第2指関節に対するゲインを調整する。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
制御装置
【課題】撮像画像により対象物またはロボットの動作部位を認識することが困難な状況となった場合にも、タスクを継続して実行することができるロボットの制御装置を提供する。
【解決手段】追跡処理手段151は、撮像画像において第1対象物T1またはロボットRの動作部位を検出する第1注視点A1を設定し、第1注視点A1により第1対象物T1またはロボットRの動作部位を追跡する。このとき、追跡処理手段151は、第1注視点A1を喪失した場合に、喪失した第1注視点A1と異なる第2注視点A2に変更するなど、第1対象物T1またはロボットRの動作部位の検出方法を変更する。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ロボットの把持制御システム及びロボット
【課題】把持の成否の判定基準を、物体やタスクに応じて適切な基準となるように柔軟に変更可能とすること。
【解決手段】本発明に係るロボット10の把持制御システムは、物体と、その物体に応じた目標把持状態を含む把持方法情報とが対応付けて記憶された把持方法DB30と、把持方法DB30に記憶された把持方法情報に従って物体をハンドにより把持させる際に当該把持の成否の判定に利用する判定基準情報で、目標把持状態に対するセンサ11で検出される把持状態の一致度に関する判定基準情報が、物体と対応付けて記憶された把持判定基準DB40と、把持判定基準DB40を参照して、指令される物体に応じた判定基準情報を取得して把持判定基準情報として決定する把持判定基準決定器60と、一致度が、決定された把持判定基準情報に基づいて把持の成否を判定する把持成否判定器70と、を備える。
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
教示点補正装置及び教示点補正方法
【課題】対象ワークの設置誤差に加えて形状誤差をも考慮した上で、作業ロボットの教示点を補正することのできる教示点補正装置及び教示点補正方法を提供する。
【解決手段】作業ロボット1に予め設定された基準教示点を、作業対象となる対象ワーク30bの状況に応じて補正する教示点補正装置である。教示点補正装置は、基準ワーク30a及び対象ワーク30bに設定された特徴点の位置と、基準ワーク30a及び対象ワーク30bの断面形状との計測が可能な2次元変位センサ3と、基準ワーク30aの特徴点の位置と対象ワーク30bの特徴点の位置とを比較することによって対象ワーク30bの設置誤差を演算すると共に、基準ワーク30aの断面形状と対象ワーク30bの断面形状とを比較することによって対象ワーク30bの形状誤差を演算する演算部5と、設置誤差及び形状誤差に基づいて基準教示点を補正する補正部6と、を備えている。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
ハンガーラインへのワーク供給装置及び方法
【課題】移動する複数のハンガーのフックに、ハンガーの移動を停止することなく、かつフックの方向を制限することなく、特別な付帯設備を用いずに、ワークを安全かつ確実に吊下げることができ、ハンガーラインの速度を高めることができるハンガーラインへのワーク供給装置及び方法を提供する。
【解決手段】ワーク1を把持するハンド11を有し該ハンドを3次元的に移動可能なロボット12と、ロボットを制御するロボット制御装置と、ハンガーライン2内を移動するハンガー3の画像を撮影する撮像装置16と、ロボット制御装置へハンドの手先軌道を出力するリアルタイム計算機とを備える。撮影画像に基づきハンガー3に設けられたフック4の位置と姿勢を検出し、この検出結果に基づいてロボット12をフィードバック制御し、ワーク1を把持したハンド11をフック4の移動に追従させて移動しワーク1をフック4に吊下げる。
(もっと読む)
1 - 20 / 74
[ Back to top ]