
Fターム[3C007WB01]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 歩行制御 (469)
Fターム[3C007WB01]の下位に属するFターム
静歩行 (25)
歩行状態の切替(例;方向転換) (33)
歩行パターンが予め決まっているもの (20)
歩容、歩行パターンの生成 (94)
上体傾斜、姿勢の制御 (43)
ZMPを考慮するもの (114)
関節角、関節トルクに着目して制御 (24)
特定位置(重心等)に着目して制御 (95)
Fターム[3C007WB01]に分類される特許
1 - 20 / 21
画像認識装置、装着型ロボット、及び画像認識プログラム
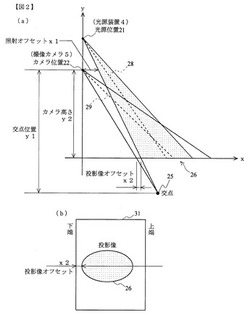
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
脚式移動ロボットの外力目標生成装置

【課題】複数の接触対象面からロボットに外力が作用する状況でロボットの運動を行いながら、ロボットに作用させるべき外力に関する目標を効率よく適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1の並進運動に係わる補償総並進外力を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)の暫定値を決定する。さらに、ロボット1の回転運動に係わる補償総モーメント外力を実現するために、仮想面必要並進力の暫定値と組み合わせるモーメント補償量を決定し、この仮想面必要並進力の暫定値とモーメント補償量との組に基づいて各接触対象面からロボット1に対する目標外力及び目標外力作用点を決定する。
(もっと読む)
歩行補助装置の制御装置および制御方法
【課題】歩行姿勢、作業姿勢や重量物運搬等によって装置使用者の重心位置が前後左右に偏って場合に、装置使用者の左右の脚の荷重負担のバランスを回復する制御を直接的に行い、左右の脚の荷重負担のバランスが崩れたことを速やかに回復すること。
【解決手段】装置使用者の左右の足に作用する床反力を左右個別に計測し、床反力の計測値を用いて装置使用者の左右の脚の荷重負担のバランスを補償するアシスト力を演算し、演算されたアシスト力に応じて左右の電動モータ36L、36Rに出力する制御指令値を演算する。
(もっと読む)
ロボット及びその歩行制御方法
【課題】二足ロボットの歩行時、膝を最大限に伸ばして腰の動きを最小化し、人間の歩行パターンと最大限に類似した歩行パターンを生成するロボット及びその歩行制御方法を提供する。
【解決手段】歩行パターンを生成し、前記歩行パターンに対応する歩行パターン類似度を計算し、前記歩行パターン類似度を予め定められた基準パターン類似度と比較し、その比較結果によって前記歩行パターンを変更することを含んでロボットの歩行制御方法を構成する。
(もっと読む)
歩行ロボット
【課題】 本発明は、ピッチ方向大腿部関節及び膝関節の駆動構造が改善された歩行ロボットを提供するためのものである。
【解決手段】 本発明に係る歩行ロボットは、大腿リンクが上体に対してピッチ方向に回転されるように第1ピッチ方向の大腿部関節を駆動する第1ピッチ方向アクチュエータと、下腿リンクが大腿リンクに対してピッチ方向に回転されるように第1ピッチ方向アクチュエータの駆動力を上記膝関節に伝達する動力伝達装置を具備して構成される。
(もっと読む)
移動ロボット及び環境地図生成方法
【課題】少ない計算コストで高速に足平着地位置の決定精度を向上させることが可能な移動ロボット及び環境地図生成方法を提供する。
【解決手段】本発明に係る移動ロボット100は、環境地図21を参照して移動ロボット100の脚部下端に設けた足平の着地位置を計画し、該計画した足跡計画に基づいて移動する移動ロボット100であって、環境地図21において、計画した足跡計画に影響を与える所定の障害物の認識精度を向上させるものである。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
脚式ロボットの動作制御のための外乱検出方法及びその装置
【課題】脚式ロボットの転倒合力を検出し、補償するための技術を提供する。
【解決手段】脚式ロボットの胴体に関する3軸の並進加速度と3軸の回転角加速度のうちの少なくとも1軸についてのロボット慣性力、あるいはそのロボット慣性力を等価的に算出できる慣性力検出装置を備え、想定する床面に対してロボットが転倒しない動作を生成するとともに、生成した動作で発生しようとしている足裏力を出力する動作生成装置を備えた脚式ロボットにおいて、慣性力検出装置で検出される慣性力と、上記動作生成装置で発生しようとしている足裏力の加減算から、動作生成装置が想定していた床面と脚式ロボットが実際に立脚している床面の誤差を起因として床面が脚式ロボットを転倒させようとする力である床起因転倒力と、外部から胴体に作用する力である外部起因転倒力との合力である転倒合力を検出し、補償する。
(もっと読む)
脚式移動ロボット
【課題】カメラの撮像画像による床面の形状を認識するための演算処理を軽減しつつ、ロボットの適切な移動制御を行なうことを可能とする脚式移動ロボットを提供する。
【解決手段】ロボット1の移動時に、該ロボットの現在の動作制御のために使用している床面形状の情報により表される床面である現状想定床面に対するロボット1の脚体5L,5Rの複数歩分の着地予定位置を設定し、その各着地予定位置毎に、該着地予定位置の近辺に、ロボット1に搭載されたカメラ27L,27Rの撮像画像に投影する画像投影領域A(i)を設定する。設定した各画像投影領域A(i)をカメラ27L,27Rの撮像画像の撮像画像に投影してなる部分画像領域の画像に基づいて、各部分画像領域毎に、該部分画像領域内に撮像されている実際の床面である実床面部分領域Ar(i)の形状を表す形状パラメータ(n(i),d(i))を推定する。
(もっと読む)
脚式ロボットと脚式ロボットの歩行制御方法
【課題】 足先センサを用いずに、安定した歩行を行う脚式ロボットとその歩行制御方法を提供する。
【解決手段】 体幹と、体幹に対して揺動可能に連結されている脚リンクと、目標とする足先運動の経時的変化を記述する足先歩容データを記憶している手段210と、目標足先位置の変化に追従する目標ZMPを実現する目標とする体幹運動の経時的変化を記述する体幹歩容データを記憶している手段210と、実際の体幹運動を検出する体幹運動検出手段218,220と、目標とする体幹運動と実際の体幹運動の偏差を算出する偏差算出手段312と、算出された偏差から所定の伝達関数に基づいて補正量を求める補正量算出手段308と、求められた補正量に基づいて目標とする体幹運動を記述するデータを補正する補正手段306とを備えている。
(もっと読む)
2足歩行ロボット
【課題】浮揚自在で、軽量化と構造の簡素化を実現した2足歩行ロボットを提供すること。
【解決手段】2つの股関節2a,2bに左右の脚部が装着され、該股関節2a,2bが接続部材1に接続されてなる2足歩行ロボット10であり、股関節2a,2bはロボットを進退させるべく左右の脚部を前後方向に回動させる駆動装置2a1,2b1を備え、左右の脚部の双方には、略平坦なルーバー8,8がその長手方向を脚部の長手方向に向けた姿勢で、一方の脚部における他方の脚部に対向する側面に装着されており、ダクテッドファン7が第2、第3の駆動装置91,92を介して、ファンの回転軸73を一方の脚部側から他方の脚部側へ回動自在に装着され、かつ、ファンからの吹き出し流れがルーバー8,8に直射されるようになっており、股関節の動作に応じたルーバー8,8の傾斜によって浮揚方向が調整される。
(もっと読む)
2足移動体の歩行ステップをテンキーによって制御する装置
【課題】 2足移動体のステップをテンキー入力し、それに対応したステップ結果を確認できる装置を提供する。
【解決手段】 構成要素はコンピュータのハードウェアとソフトウェアである。ソフトウェアは、テンキー入力順とステップを対応させるデータとテンキー入力受付機能、ステップ判定機能、ステップ結果出力機能のプログラムで構成する。2足移動体のステップにテンキーを順に押すことを割り当て、テンキー位置によって足の左右(回転時は両足)、歩幅、踏み出し方向、足の向き(回転時)を判定する。ステップ結果を足跡や床面パターン移動、または2足移動体を模した画像や視界変化の出力で行う。
(もっと読む)
データ処理方法、データ処理装置およびプログラム
【課題】従来に比べて少ない処理負荷で、移動体の動き量に対するバイアス値を自動的に特定できるデータ処理方法を提供する。
【解決手段】CPU19は、異なる複数のバイアス値bias_iを仮定した複数の地図データMiを継続して保持し、撮像データIM(S10L,S10R)が入力されると、それを基に上記保持した複数の地図データMiをそれぞれ更新し、その結果を評価することで、最適なバイアス値bias_iを特定する。
(もっと読む)
ロボット装置及びその制御方法
【課題】自励発振と引き込み特性を持つ神経振動子を用いて可動部の非周期的な運動の制御を好適に行なう。
【解決手段】神経振動子による運動制御を行なっている際に突発的な外乱の発生などの事象に応じて、神経振動子に対して非周期的信号によるフィードバックを行なう。神経振動子の発振振幅に比べて十分大きなパルス状の非周期信号を入力することで、特定振幅のみを増減させる、あるいは発振そのものを停止することが可能となる。前者により非周期的な運動の生成が可能となり、後者により発振停止が可能となり過大な出力を回避することができる。
(もっと読む)
足部安全機構及びそれを備えた2足歩行ロボット並びにその制御構造
【課題】既存の2足歩行ロボット等の足底に容易に取付けることができ、歩行時には通常の足底として使用することができると共に、緊急時には支持多角形を拡大して広い姿勢安定領域を確保でき、転倒を防止して各部の動作を緊急停止することができる信頼性に優れる足部安全機構を提供することを目的とする。
【解決手段】歩行ロボットの足底に配設される基部と、基部に回動自在又は伸縮自在に配設され転倒防止動作時に基部の外方に突出するアーム部と、を備えている。
(もっと読む)
ロボット装置及びその制御方法
【課題】 複数の物理振動子を配置して運動制御を行なう際の、振動子間の位相関係を好適に調整する。
【解決手段】 可動部の周期運動の制御に引き込み特性を利用するために、4素子型の神経振動子を基準振動子として用いている。4素子型の振動子は90度位相差のある信号を出力する構造を備えている。したがって、90度異なる振動子の出力が必要となる局面においては、センサ・フィードバックを用いることなく所望の位相関係を調整することができ、堅牢な制御システムを構築することができる。
(もっと読む)
二段階外乱応答手法を用いた脚式ロボットの制御システムおよび制御方法
【課題】 脚式ロボットが予期せぬ力を受けたときに自身のバランスを維持できるようなシステムと方法を提供する。
【解決手段】 反射段階では、ロボットは力に従うことで即座にこの力の影響に対処する。1つの実施形態では、反射段階中に、制御システムは、力の不安定な影響を相殺するのに必要な大きさで、ロボットの角運動量の負の変化量を発生させるような動きをロボットが実行するように指令を決定する。回復段階では、ロボットは、反射段階で運動を行った後に自身の姿勢を回復する。1つの実施形態では、ロボットは、ロボットの位置エネルギーを最大化する静的な安定した直立姿勢に戻る。1つの実施形態では、回復段階中に、制御システムは、ロボットが自身の位置エネルギーを増加させる動きを実行するように指令を決定する。
(もっと読む)
自重支持装置及びそれを備えた2足歩行ロボット並びにその制御構造
【課題】立脚時において、ペイロード等の重量によって脚部に加わる負荷を軽減でき、2足歩行ロボットのペイロードを増加させることができ高可搬重量性に優れる自重支持装置の提供。
【解決手段】2足歩行ロボットのベース部と左右の足部との間にそれぞれ配設され、左右各々の足部の立脚時に長手方向に弾性伸縮してベース部を支持する立脚用伸縮部と、立脚用伸縮部に直列方向に配設され左右各々の足部の遊脚時に長手方向に伸縮する遊脚用伸縮部と、を備えている。
(もっと読む)
ロボット制御アルゴリズム構築装置、ロボット制御アルゴリズム構築プログラムロボット制御装置、ロボット制御プログラム、およびロボット
本発明は、ロボットの運動を制御する制御アルゴリズムを構築する装置やその構築された制御アルゴリズムにしたがってロボットの運動を制御する装置等に関し、従来のMZP法等、力学的な方程式を解く方式と比べ制御アルゴリズム作成のコストや時間を大きく下げることを目的とし、入力に対すアナログ的な時間遅れを伴う出力を生成するニューロンを含むリカレントニューラルネットワーク(RNN)により制御アルゴリズムを構成し、そのRNNの係数を低次の項から高次の項に向かって順次決定していく。  (もっと読む)
(もっと読む)
トルク制御機構付超音波モータ及び超音波モータ搭載ロボット
【課題】回転子に一端が接続されたワイヤを固定子の中空孔を挿通して張力を適宜調節可能に構成して超音波モータの予圧力を適宜調節するトルク制御機構付超音波モータ及び超音波モータ搭載ロボットの提供。
【解決手段】回転子2に一端が接続されてこの回転子2の回転中心Aを通り中空孔1aを挿通して固定子1を縦貫するワイヤ3と、固定子1中に圧電素子11,12,13,14とともに介層されて外表面中間に一体張出し外延した懸架フランジ15を鍔設した中空孔1aの下開口端B側で貫通垂下したワイヤ3下端に固着された張力調節手段5と、を具備させる特徴的構成手段の採用。
(もっと読む)
1 - 20 / 21
[ Back to top ]