
Fターム[3C030DA11]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | ライン配置 (249)
Fターム[3C030DA11]の下位に属するFターム
Fターム[3C030DA11]に分類される特許
1 - 20 / 51
自動車組立設備及び自動車組立方法
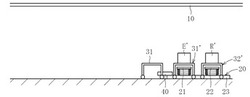
【課題】サイクルタイムの延長を招くことなく、空になった台車を排出位置まで返送する。
【解決手段】リフタ20に、第1の台車31を牽引するための牽引手段(係合部40)を設け、次に組み付ける部品E’を搭載した新たな台車31’の下方に昇降台21を配置したときに、牽引手段で牽引された第1の台車31を、リフタ20の移動経路から排出する排出位置に配置するようにした。
(もっと読む)
ワーク組立て方法

【課題】組立てコストを低減することができるワーク組立て方法を提供する。
【解決手段】作業者が作業する作業者ステーションと、作業者が作業する作業者ステーションと、装置が作業する装置ステーションと、前記作業者ステーション及び前記装置ステーションの相互間で作業対象ワークを搬送する搬送手段と、を備える組立作業セルを用いたワーク組立て方法であって、前記搬送手段が前記作業者ステーションと前記装置ステーションとの間で、交互に前記作業対象ワークを移動させることで、前記作業者と前記装置とが交互にワークの組立て作業を行う。
(もっと読む)
ロボット制御方法およびロボット制御システム
【課題】主として部品供給トレイなどに搭載された作業対象部品などの位置ずれに起因する「チョコ停」の未然防止を可能とするロボット制御方法およびロボット制御システムを提供する。
【解決手段】ロボット制御方法の一実施形態では、ロボットハンド31の1つ以上の作業対象部品が搭載された部品供給トレイ5が、所定位置に載置された状態で、作業対象部品のすべてが含まれるように撮像し、撮像された画像データから作業対象部品それぞれを検出するとともに、検出された作業対象部品それぞれの正常位置に対する位置誤差が許容範囲内か否かを判定する。位置誤差が許容範囲内と判定された作業対象部品に対しては通常作業を実行するが、位置誤差が許容範囲内ではないと判定された作業対象部品に対しては通常作業を実行しない。
(もっと読む)
自動車組立設備
【課題】自動車組立設備における組付ライン及びサブラインの設計の自由度を高め、設備スペースを縮小する。
【解決手段】サブラインSEにおいて台車10を搬送するサブライン駆動手段と、組付ラインUにおいて台車10を搬送する組付ライン駆動手段(リフタ60)とを別個に設けたことにより、各ラインにおいて台車10の搬送速度や台車間のピッチ、あるいは各ラインのレイアウトを個別に設定することができるため、設備設計の自由度が高められる。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】ロボットの自動組立を継続して行う際に様々な要因によって生じ得る作業対象部品などの位置ずれによる「チョコ停」の未然防止を可能とするロボット制御システムおよびロボット制御方法を提供する。
【解決手段】ロボット制御方法の一実施形態では、X軸方向、Y軸方向および回転角θについて水平移動可能なX−Y−θステージ9上に載置された部品供給トレイ5に搭載された作業対象部品をロボットハンド31に取り付けられた小型カメラで撮像する。撮像された画像の画像処理によって、次の作業対象部品を検出して正確な位置を算出するとともに、正常位置データとの比較によって位置誤差を算出して、その位置誤差を補正するような指令をX−Y−θステージ9に与える。そのようにして位置誤差が補正された後に、次の作業対象部品に対する作業を実行する。
(もっと読む)
ワークの缶組みステージ
【課題】ワークを組み立てて、仮付けを行った後、そのままの状態で次のステージの直近位置までワークを移動させることによって、次のステージへの移載時にワークにダメージを与えないようにする。
【解決手段】ブーム1の缶組み及び仮付けする缶組みステージ10において、ガイドレール21に沿って自走する作業テーブル20にセンタブロック支持部材31及びボス部支持部部材32,33を装着する構成としており、缶組み位置P1において、作業テーブル20にセンタブロック2と、ボス部5,6を支持させて、缶組みされた状態で、作業テーブル20を溶接ステージ11,12と直近位置における移載位置P2まで自走させて、移載させるように構成している。
(もっと読む)
コンポーネント組立システムおよびコンポーネント組立方法
【課題】高精度でフロントフロアコンポーネントを組み立てできるフロントフロアコンポーネントの組立システムを提供すること。
【解決手段】コンポーネント組立システム1は、セットステーション2と、組立ステーション3と、セットステーション2と組立ステーション3との間で移動する搬送台車30と、セットステーション2の周囲に設けられた3つの供給エリア4〜6と、セットステーション2の周囲に設けられて部品11〜13、21〜23をセットステーション2または組立ステーション3に搬送する搬送ロボット40A、40Bと、組立ステーション3の周囲に設けられて組立ステーション3に位置する部品11〜13、21〜23を加工する溶接ロボット50と、組立ステーション3の周囲に設けられて組立ステーション3に位置する組み立てたフロントフロアコンポーネント10、20を払い出す払出しロボット60と、を備える。
(もっと読む)
生産システム
【課題】レイアウトの自由度を高め、スペース効率を向上させることができる配置が可能であるとともに多品種少量生産に対応した生産システムを提供する。
【解決手段】ワークの生産処理を行う装置モジュール10を複数接続してなる生産システムにおいて、装置モジュール10に、生産処理を行う処理部30と、内部に処理部30を保持し、少なくとも8以上の構成面からなる空間充填立体形状をなす装置基体20とを備え、記装置基体20の各構成面をそれぞれ接続平面24とし、装置モジュール10同士を互いの接続平面24同士を一致させた状態で接続する。
(もっと読む)
生産システム
【課題】複数の生産装置を簡便に通信可能に接続でき、生産装置のレイアウトの自由度が高められるとともに設置が容易に行える生産システムを提供する。
【解決手段】ワークの生産処理を行う生産装置2を複数備える生産システムであって、前記生産装置2は、ワークに生産処理を施す処理部21と、前記処理部21との間で信号を授受するとともに、該処理部の動作を制御する制御部22と、これら処理部21及び制御部22を保持する略箱状の装置基体23と、を有し、前記処理部21、前記制御部22及び前記装置基体23のうちいずれか1つ以上の外面に、前記制御部22に電気的に接続され、装置外部との間で光通信を行う光無線通信手段4が配設されていることを特徴とする。
(もっと読む)
生産システム
【課題】生産装置を並べ直すことなく、ワークに対する生産処理の順序の変更に対応可能な生産システムを提供する。
【解決手段】
ワークの生産処理を行う3つ以上の生産装置2〜9と、生産装置のうち、1つの生産装置と他の1つの生産装置に両端部が着脱可能に接続される搬送路11a、12aと、搬送路上を移動して、搬送路が接続された1つの生産装置から他の1つの生産装置にワークを搬送する搬送手段11b、12bと、を備える生産システム1であって、生産装置は、生産処理を行う処理部21と、処理部を内部に備え、略箱状に形成された装置基体28と、を有し、少なくとも1つの装置基体は、互いに交差する2方向X、Yで他の装置基体と接続されている。
(もっと読む)
生産システム
【課題】生産システムにおいて、設置床面積の有効利用が可能となり、生産装置の間でワークを効率的に搬送することができるようにする。
【解決手段】生産システムは、生産装置が、作業領域SのワークWに生産処理を行う作業ユニット6と、作業ユニット6を備え、水平面に平行な3方向と鉛直方向とからなる3つ以上の連接方向で他の生産装置と連接可能に設けられた連接壁部を有する筐体2と、連接方向に開口され、ワークWを搬入または搬出する複数のワーク搬送口と、作業領域Sと複数のワーク搬送口との間で、ワークWを移動させるワーク移動部8と、水平面に平行な連接方向のワーク搬送口である正面搬送口部3a、右側面搬送口部3c、左側面搬送口部3eにワークWを回転させる回転テーブル5と、を備える。
(もっと読む)
ワーク搬送装置及びその方法
【課題】 作業者による作業エリアとロボットによる加工エリアとの間でワークを搬入搬出する搬送ロボットの必要スペースを小さくすることができるワーク搬送装置を提供する。
【解決手段】 2つの搬送ロボット3,4を用いて共通の作業者による作業エリア1と共通の溶接ロボット18,19による加工エリア2との間で治具9を搬入搬出する装置であって、2つの搬送ロボット3,4の搬送軌道21,22は、平面同一経路で且つ上下にオフセットしている。作業エリア1と加工エリア2を分離する安全柵5が設置され、この安全柵5には搬送ロボット3,4が作業エリア1に治具9を搬入する搬入口6が設けられ、この搬入口6の近傍まで移動可能な移動機構14,15が搬送ロボット3,4に備えられている。
(もっと読む)
生産装置
【課題】生産装置において、作業を行う作業ユニットの組み合わせを容易に変更することができ、コンパクトな構成が可能となるようにする。
【解決手段】ワークWに対して作業を行う生産装置100であって、装置本体1を作業準備室と作業室とに仕切る床部5と、作業室を床部5上で外部から隔離するクリーンカバーと、作業準備室の内部から床部5の位置まで昇降可能な作業架台部21と、作業架台部21を昇降させる昇降機構と、多関節ロボット10R、10Lを有するマニピュレータ9と、作業を行うための制御信号を生成する制御部と、制御部で生成された制御信号を作業架台部21に伝達する信号伝達部と、装置本体1に給電する本体電源と、作業を行う作業機構62、作業機構62に給電するユニット電源部64、および信号端子部を有し作業架台部21に着脱可能に設けられた作業ユニット20とを備える。
(もっと読む)
フレキシブル生産システム
【課題】セル生産方式のフレキシブル生産システムにおいて、人の生産性は落とすことなく容易かつ柔軟にシステムの再編成を可能とする人機械協調型のシステムを実現して生産性向上を図る。
【解決手段】本システム1は人セル部11に隣接する機械部12を備え、機械部12は移載するための複数のハンド部21と、ハンド部21を移動させる複数のアクチュエータ22と、ハンド部21の移動の方向に沿って配置され、部品に処理を施す複数の処理装置3と、人セル部11側から機械部12に部品を投入するための投入部4と、機械部12から人セル部11側に部品を取り出すための取出部5と、投入部4から各処理装置3を経由して取出部5に至る部品の順路の途中に人セル部11側から追加部品を投入し供給するための途中部品搬入装置6とを備えている。途中部品搬入装置6を備えることにより、人セル部11と機械部12とを分離したシステムを容易かつ柔軟に構成できる。
(もっと読む)
生産設備及び生産システム
【課題】ロボット動作領域に作業者が入ることなく、復旧、設定変更、製造等の人的作業を行うことができる生産設備を提供すること。
【解決手段】生産設備1は、ケーシング11と、ケーシング11内に収容されてブーツバンドの加締めを行う専用装置としての加締め装置12と、内部搬送装置13とを備える。加締め装置12とケーシング11により、生産設備1の前面側の人的作業領域Fと、生産設備1の背面側の搬送ロボット2の動作領域Bとを隔てる。生産設備1の前面側に存在する作業者は、搬送ロボット2の動作領域Bに入ることなく加締め装置12の操作を行うので、作業を行う際に搬送ロボット2を停止することが不要となる。したがって、生産効率を向上でき、しかも、安全柵や隔壁を生産設備1とは別に設ける必要がないので生産エリアの小型化を図ることができる。
(もっと読む)
ワークの組立方法及びその装置
【課題】作業ステーション間での作業休止状態となる時間を短縮して効率よくワークの組立を行うことができるワークの組立方法及びその装置を提供する。
【解決手段】3つの作業ステーション1,2,3を設け、組立作業手段14により第1作業ステーション1で組立工程を行い、第1作業ステーション1以外の第2及び第3作業ステーション2,3でワークセット工程を行う。作業ステーション1での組立工程が完了した時点でワークセット工程が完了している第2作業ステーション2へ組立作業手段14を移動させ、第3作業ステーション3ではワークセット工程を継続して行う。
(もっと読む)
生産装置及び生産システム
【課題】投入搬出口から作業室内に搬入された作業ユニットを装置内で容易に移動させること。
【解決手段】箱状の装置本体と、装置本体を、下側の作業準備室2と、上側の作業室とに仕切る平板状の隔壁部材と、作業準備室の内部から隔壁部材の位置まで昇降可能な可動床部8と、作業準備室内に設けられ、可動床部を昇降させる昇降機構と、可動床部に対して着脱可能に設けられ、作業を行う作業ユニットと、作業ユニットを作業準備室内に対して出し入れするために、作業準備室を外部と仕切る側壁部2a、2b、2c、2dに設けられた投入排出口22と、作業準備室内において、投入排出口と昇降機構により下降された可動床部との間の平面領域内で、作業ユニットの下面に駆動力を付勢して、作業ユニットを少なくとも2方向に搬送する搬送機構24と、を備える生産装置を提供する。
(もっと読む)
車両組立ラインにおけるドア搬送装置およびドア搬送方法
【課題】コンベヤの総設置距離を小さくしつつ、左右のドアの艤装組立作業を作業者が対面するかたちで行う際に、一方の作業者側でのハンガーの揺れ等が他方の作業者側での作業に影響しないドア搬送装置を提供する。
【解決手段】一次コンベヤ3と一対の二次コンベヤ4と備え、一次コンベヤ3の一次ハンガー5に各二次コンベヤ4の二次ハンガー16がそれぞれに吊り下げ支持可能となっている。特定の区間ではドアDを搭載した二次ハンガー16を二次コンベヤ4のガイドレール17から外して一次コンベヤ3によって搬送する。別の区間では各二次ハンガー16を一次ハンガー5から切り離し、それぞれの二次コンベヤ4で独立して搬送する。
(もっと読む)
作業自動化方法
【課題】人手による作業をロボットによる作業に円滑に移行できる作業自動化方法を提供すること。
【解決手段】作業自動化方法は、ワーク組み立てシステム1に、人手作業エリア30A、30B、ロボット作業エリア40、および緩衝スペース50A、50Bを設け、人手作業エリア30A、30Bでは、ボディ10を連続送りとし、ロボット作業エリア40では、ボディ10をタクト送りとし、人手作業のうち移行対象となるものを抽出する手順と、この移行対象となる人手作業を、人手作業エリア30Bのうち最も緩衝スペース50B側で行う手順と、新たなロボットを緩衝スペース50Bに設置して、ロボット作業エリア40を拡張する手順と、移行対象となる人手作業を新たなロボットの作業に移行する手順と、人手作業エリア30Bのうち最も緩衝スペース50B側のエリアを削減して、人手作業エリア30Bを縮小する手順と、を備える。
(もっと読む)
搬送治具、ワーク搬送・設置部品、及び、これを用いたロボット生産システム
【課題】搬送対象物を搬送ロボットを用いて確実に搬送し、自動生産ラインの自動化率を向上させることができる搬送治具を提供する。
【解決手段】搬送治具20は、台座10上に位置決め状態で載置される載置部21と、載置部21に設けられ、ワーク40を位置決め状態で保持するワーク保持部22と、載置部21の側方に一体に設けられ、搬送ロボットが把持するロボット用グリップ23と、ロボット用グリップ23に設けられた位置認識用視覚マーカ24とを備える。
(もっと読む)
1 - 20 / 51
[ Back to top ]