
Fターム[3C030DA17]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | ライン配置 (249) | 直線状 (83)
Fターム[3C030DA17]に分類される特許
1 - 20 / 83
位置決め装置
【課題】 被移載物の下方に挿入された被載置部材の所定位置に被移載物が載置されるように、被載置部材を簡単な装置構成で位置決めする位置決め装置を提供する。
【解決手段】 位置決め装置は、可動部と、可動部を移動方向に変位駆動する駆動手段と、一端部が可動部に連結され、移動方向に伸縮可能に延設される弾性部材と、弾性部材の他端部が連結され、可動部の変位に伴って近接方向に変位する位置決め部材とを含み、位置決め部材は、近接方向への変位によって被移載物に接触する上段接触部と被載置部材に接触し、かつ上段接触部に対し所定の位置に配置された下段接触部とを含む。駆動手段は、位置決め部材が被移載物に接触するのに必要な変位量を超えて可動部を変位させ、弾性部材は、可動部が変位するとき、上段接触部が被移載物に接触するまでは、位置決め部材を近接方向へ変位させ、被移載物に接触後は、可動部の変位に伴って伸長または収縮する。
(もっと読む)
組立ライン

【課題】本発明は、パレットを回収する作業を省くことができる組立ラインを提供することを課題とする。
【解決手段】組立ライン40は、親パレット31と子パレット32とを互いに並べた状態で搬送し、第1群組立機106により親部品11へ子部品を組み込む第1搬送路41と、この第1搬送路の出口41bから親パレット31を受け取り、第2群組立機108により組立の仕上げを行う第2搬送路42と、この第2搬送路の出口42bから親パレット31を受け取り、組立てた機械装置を払い出し、空の親パレット31を戻す第3搬送路43と、第1搬送路の出口41bで空の子パレット32を受け取り、第1搬送路の入口41aに戻すショートパス搬送路45とからなる。
(もっと読む)
作業台装置
【課題】省スペースでの作業を可能にすると共に、作業員の移動距離を低減して作業効率を向上させるようにした作業台装置を提供する。
【解決手段】作業台装置10において、一端12bから他端12cの間に作業員Pが並列して作業可能な作業台12と、作業台12の下方に設けられ、作業台12の裏面に搬送面14aを対向させると共に、搬送方向Bが作業台12の他端12cから一端12bに向かうように構成されるコンベア14とを備える。
(もっと読む)
部品実装ラインの生産管理装置及び生産管理方法
【課題】複数本の部品実装ラインを並設した生産設備を有効に活用して生産性を向上する。
【解決手段】複数本の部品実装ラインのうちの一方の部品実装ラインの途中と他方の部品実装ラインの途中との間に、両部品実装ライン間で回路基板を搬送するバイパスコンベア11を設置して、一方の部品実装ラインの途中からバイパスコンベア11を介して他方の部品実装ラインの途中につながるパイパス実装ラインを構築する。生産管理コンピュータは、各部品実装ライン毎にそれぞれ部品実装基板を生産する通常生産パターンと、前記パイパス実装ラインで部品実装基板を生産するパイパス生産パターンの中から生産パターンを選択する。
(もっと読む)
自動組立装置
【課題】搬送中のワークに部品を組み付けることのできる自動組立装置を提供する。
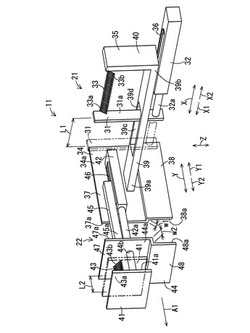
【解決手段】ワーク12を水平方向に搬送する搬送手段30、31と、搬送手段30、31で搬送されているワーク12の上方へ被挿入部品13を供給する供給手段40、41と、搬送手段30、31で搬送されているワーク12および供給手段40、41で供給された被挿入部品13のうち少なくとも一方を上下方向に移動させる上下駆動手段33とを備え、供給手段40、41は、被挿入部品13をワーク12の搬送方向に取り出すことのできるように開放された開放部413を有し、搬送手段30、31でワーク12を水平方向に搬送しながら上下駆動手段33でワーク12を被挿入部品13に挿入させることで、ワーク12で被挿入部品13を引っ掛けて開放部413から引き出し、開放部413から引き出された被挿入部品13をワーク12に自重落下させる。
(もっと読む)
車体とパワープラントの結合方法および結合設備
【課題】パワープラントを容易に車体に結合可能な車体とパワープラントの結合方法および結合設備を提供する。
【解決手段】車体Wを昇降自在に載置する昇降装置4を有し、フロアレベルの車体搬送ライン上を移動する搬送台車1と、パワープラントPを載置する載置パレット6と、載置パレット6を搬送台車1に移載する移載手段と、を有し、昇降装置4により車体Wを上昇させた状態で、載置パレット6を移載手段により搬送台車1に移載し、次いで、昇降装置4により車体Wを下降させてパワープラントPの上部取付部と車体側の取付穴とを締結して両者を一体にし、次いで、昇降装置4により車体Wを上昇させてパワープラントPの下部取付部と車体側の取付穴とを締結する。
(もっと読む)
ロボットシステム
【課題】一連の作業を複数の作業ロボットに作業分割して実行するロボットシステムで、一部の作業ロボットの一部の作業区分に遅延が発生しても、他の作業ロボットに待ち時間が発生することなく生産性を向上させる。
【解決手段】アームロボット6a〜6dに設けられたロボットコントローラ4a〜4dには、n個の作業区分を割り振る。アームロボット6eに設けられたロボットコントローラ4eには、n個よりも少ないm個の作業区分を割り振る。いずれかのアームロボット6での作業区分の作業で遅延が生じたときは、遅延が生じたアームロボットよりも下流のアームロボットに設けられたロボットコントローラに、未実施となっている作業区分を割り振りし直す再割り振り処理を実行する。再割り振り処理を実行する際には、各ロボットコントローラに割り振られる作業区分の数の上限はn個である。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
遊技機器検査設備
【課題】遊技機器を検査する作業負荷を軽減し、作業能率を向上させ、設備コストを安価にする、遊技機器検査設備を提供する。
【解決手段】遊技機器検査設備Sは、液晶ユニット20を着脱可能で且つ液晶ユニットを装着状態で遊技盤に実装する姿勢と同じ起立姿勢と倒伏姿勢とに亙って切換え可能で且つ複数のキャスターを有する複数の検査用パレット治具、複数の検査用パレット治具のキャスターが転動可能で且つ複数の検査用パレット治具をガイドして循環搬送可能な治具循環搬送路40を形成するベース台30を備え、検査用パレット治具に液晶ユニットを装着する作業を行う投入ステージ32、検査用パレット治具に装着された液晶ユニットの姿勢を切換えて液晶ユニットを検査する作業を行う検査ステージ33、検査用パレット治具から検査済みの液晶ユニットを取外して回収する作業を行う回収ステージ34が治具循環搬送路に沿って装備されている。
(もっと読む)
部品組立システム
【課題】自動化された部品組立システムにおいて、搬送台車の走行スペースを削減する。
【解決手段】主部品6を搬送する主部品搬送台車3が走行する主搬送路1から、副部品12を搭載して移動する副部品搬送台車4の部品投入路2を分岐・合流させる。副部品搬送台車4により、副部品12を組立ステーション9のストッカ17に補充するときは、副部品搬送台車4を部品投入路2に分岐させて、集中部品庫38から副部品12を積み込んだ後、主搬送路1へ合流させて目的の組立ステーション9へ運ぶ。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
搬送台車移動システム、搬送ライン及び搬送方法
【課題】ベース部品に対する下方と、ベース部品に対する上方及び側方との上下2段における作業を、別々の作業者によって同時間帯に行うことができる搬送台車移動システムを提供すること。
【解決手段】搬送台車移動システム1は、ベース部品8を載置する搬送台車3を、複数台連続して組付作業工程に移動させるよう構成してある。互いに隣接する搬送台車3間においては、搬送台車3Aの複数のポスト44Dと、搬送台車3Bの複数のポスト44Cとに、上方作業台7が架け渡してある。搬送台車3が移動する床面2には、上方作業台7に対する、搬送台車3の移動方向Dの左右両側に、固定作業台15が設置してある。搬送台車移動システム1は、搬送台車3が複数台連続して移動する際に、下方作業台5と、上方作業台7及び固定作業台15との上下2段の作業台において、ベース部品8に対して作業者Mが作業できるよう構成してある。
(もっと読む)
生産システム
【課題】カメラの振動を抑制してカメラの検知精度を向上させ、ロボットアームやワークの位置決めを高精度に行う。
【解決手段】ロボットセル200は、各架台1031〜1038をそれぞれ囲うように配置された骨組み構造のブース1041〜1048を備えている。また、ロボットセル200は、各ブース1041〜1048にそれぞれ取り付けられ、各ブース1041〜1048のワークスペースを撮像可能としたカメラ1061〜1068を備えている。各ブース1041〜1048は、平面視で短辺xと長辺yとを有する直方体形状に形成されて、長辺側の枠側面同士が対向するように短辺方向Xに沿って隣り合わせて配置されている。そして、複数のブース1041〜1048のうちの隣り合う2つの枠体が、着脱可能な連結部材500で連結されている。
(もっと読む)
製造作業機
【課題】複数の作業要素実行装置によって製造作業を行う製造作業機の実用性を向上させる。
【解決手段】複数の作業要素実行装置40,28,32等と、それら作業要素実行装置を、複数の動作指令を順次送信することによって統括して制御する統括制御装置130,136とを備えた製造作業機において、各作業要素実行装置が、自身の作動の制御を司る個別制御装置90,100,104等と、自身の対象となる作業要素を実行するのための作動デバイス58,72,78等とを備え、各個別制御装置が、統括制御装置から送信された動作指令の内容を認識し、動作指令に対応した動作を行うべく作動デバイスの作動を制御するように構成する。このように構成すれば、統括制御装置は、敢えて送信先の作業要素実行装置毎に動作指令のプログラミング言語を変更する必要がなくなり、製造作業機の実用性を高めることが可能となる。
(もっと読む)
ロボットセル
【課題】ロボットステーションの小型化と、メンテナンス性及び高剛性の両立が可能なロボットセルを提供する。
【解決手段】 複数のロボットによって部品を組立てるロボットセルにおいて、一対のロボットアーム102をそれぞれ搭載した複数の架台101を互いに隣接させてそれぞれ収容する複数のブース103を設ける。各架台101の一側面は、電源コントローラボックス106を出入するための開口部101aを有し、開口部101aによって架台101の剛性が低下するのを補うため、各ブース越しに互いに隣接する2つの架台101を接続部材120によって結合する。各接続部材120の両端部は、それぞれビスによって両側の架台101に締結される。
(もっと読む)
溶接ライン
【課題】建設機械の上部旋回体における旋回フレーム等のように缶組みしたワークを溶接する際に、構成各部を連結する作業を効率的に、しかも安全に行えるようにする。
【解決手段】搬入ステージ11と、4組の溶接ステージ12と、搬出ステージ15とからなり、各溶接ステージ12には自動溶接作業部13と手動溶接作業部14とから構成し、相隣接する溶接ステージ12,12間に待機部16が設けられ、X軸方向に移動する主搬送路20にY軸方向に移動するY軸移送体25が設けられて、ワーク10を移載するようになし、また待機部16におけるワーク載置部16a〜16c間にワーク10をピッチ送りするようになし、さらにXY移動搬送手段40によって、ワーク載置部16b,16cから自動溶接作業部13,手動溶接作業部14にワーク10を直接移載できるようにしている。
(もっと読む)
車体生産装置
【課題】位置決めロボットが部品の搬送と部品の治具としての機能を発揮することで、車体である主要組製品を比較的容易に生産できる車体生産装置を提供することにある。
【解決手段】各溶組工程域Enで主要組製品WNを生産し、後段の溶組工程域Enに搬送することを繰り返すことで車体を製造する車体生産装置Aにおいて、溶組工程域Enには、溶組制御をする工程域制御手段30と、部品mをセット位置dに位置決めする位置決めロボット40と、部品mの溶接を行う溶接ロボット50と、部品mを支持する支持台とが配備され、工程域制御手段30は、位置決めロボット40により部品mを取り出しセット位置dへ位置決めし、溶接ロボット50により部品mの溶接を行って主要仮組製品Wnを生産し、次いで、待機位置s0に位置決めロボット40を待機させた後、溶接ロボット50にて主要仮組製品Wnの溶接箇所の増打を行い主要組製品WNが生産される。
(もっと読む)
自動車組立設備
【課題】自動車組立設備における組付ライン及びサブラインの設計の自由度を高め、設備スペースを縮小する。
【解決手段】サブラインSEにおいて台車10を搬送するサブライン駆動手段と、組付ラインUにおいて台車10を搬送する組付ライン駆動手段(リフタ60)とを別個に設けたことにより、各ラインにおいて台車10の搬送速度や台車間のピッチ、あるいは各ラインのレイアウトを個別に設定することができるため、設備設計の自由度が高められる。
(もっと読む)
ワークの搬送装置
【課題】ワークが相互に干渉することなく搬送順位通りに搬送でき、省電力化を図る。
【解決手段】ワークの搬送装置1は、第1のセンサ21が第1のワークW1を検知した場合に、第2の搬送コンベア12を駆動させて第2の搬送コンベア12へ第1のワークW1を搬送するとともに、その後第2のセンサ22が第1のワークW1を検知したとき、第1の搬送コンベア11および第2の搬送コンベア12を停止させるワーク投入ステップと、第1の搬送コンベア11を駆動させて第2のワークW2を搬送し、第1のセンサ21が第2のワークW2を検知した場合に、第2の搬送コンベア12を駆動させて第2の搬送コンベア12へ第2のワークW2を搬送して、第1のワークW1および第2のワークW2を所定の離隔量だけ離隔して第2の搬送コンベア12上に留置するピッチ送りステップと、を連続して実行する。
(もっと読む)
フローラインを操作する方法、組立てトレーラ、牽引棒、組立てトレーラに設置された重機、及びフローライン
本発明は、風車ナセル(3)等の重機の組立てのための2つ以上の組立てステーション(A1,A2,A3,A4,A5,A6)を有するフローライン(1)を操作する方法に関する。この方法は、準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)をフローライン(1)において第1の組立てステーション(A1)の前に又は該第1の組立てステーション(A1)に設置するステップと、前記準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を少なくとも1つのフローライン牽引棒(37)に結合するステップと、前記準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)が前記第1の組立てステーション(A1)の前に設置されている場合には、前記組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を前記第1の組立てステーション(A1)へ移動させるステップと、その他の場合には、全てのフローライン組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を次の組立てステーション(A1,A2,A3,A4,A5,A6)へ移動させるステップと、を有しており、フローライン組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を移動させるステップが、時間の上で段階的に行われる。本発明は、同じ目的のためのフローライン(1)にも関する。 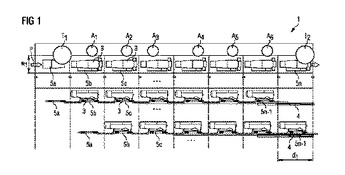 (もっと読む)
(もっと読む)
1 - 20 / 83
[ Back to top ]